【零基础讲论文源码】Swin-Transformer源代码阅读
目前这个系列会开两个方向, cv transformer 和OCR方向。
Transformer方向
- swin-transformer解读【链接】
- CVT 解读【链接】
- 待续
OCR方向
- DBnet解读【链接】(正在制作中。。。)
- PP_OCR【链接】(待续)
- 待续
整体介绍
Swin-transformer是微软 CVPR2021今年最近一篇非常棒的论文。
Github【源代码地址】
原文地址【地址】
先上个结构图:
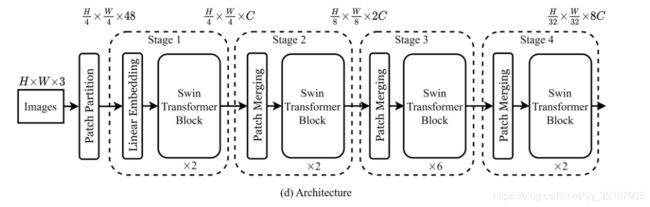
(为方便阅读,代码进行简化)
SwinTransformer
: 主代码
#整体结构中,通过PatchEmbed()分割出图像块,再经过相应层数的BasicLayer()。
class SwinTransformer(nn.Module):
def __init__():
super().__init__()
# split image into non-overlapping patches
self.patch_embed = PatchEmbed()
# build layers
self.layers = nn.ModuleList()
for i_layer in range(self.num_layers):
layer = BasicLayer()
self.layers.append(layer)
self.avgpool = nn.AdaptiveAvgPool1d(1)
self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()
#用于输出的分类维度,可以根据自己的需要更改
def forward_features(self, x):
x = self.patch_embed(x)
# b h w c -> b (h/4)*(w/4) 16*c
x = self.pos_drop(x)
for layer in self.layers:
x = layer(x)
x = self.norm(x) # B L C
#以下用于进行分类等任务,可以根据需要进行调整
x = self.avgpool(x.transpose(1, 2)) # B C 1
x = torch.flatten(x, 1)
return x
def forward(self, x):
x = self.forward_features(x)
x = self.head(x)
return x
PatchEmbed
:分割图像信息
class PatchEmbed(nn.Module):
def __init__():
super().__init__()
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
def forward(self, x):
B, C, H, W = x.shape
x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw C
#flatten(2)等于从2维度开始进行展平操作,x的维度为b c h w ,
#设patch_size为4,则结果为 b (h/4)*(w/4) 16*c
if self.norm is not None:
x = self.norm(x)
return x
论文这里是说用nn.unfold函数,卷而不积,self.proj的卷积+flatten(start_dim)模拟一个unfold的操作(确实卷积肯定是比较优的结果,直接unfold,反而不平滑),并通过patch_size的大小,对图像进行缩小,并分割,传出的特征为b (h/4)(w/4) 16c
#flatten举例
>>> a=torch.randn(1,2,3,4)
>>> a.flatten(2).shape
torch.Size([1, 2, 12])
BasicLayer:
作为核心的stage层(文中为4层)
class BasicLayer(nn.Module):
def __init__(self, ):
super().__init__()
# build blocks
self.blocks = nn.ModuleList([
SwinTransformerBlock()
for i in range(depth)])
# patch merging layer
if downsample is not None:
self.downsample = downsample()
else:
self.downsample = None
def forward(self, x):
for blk in self.blocks:
x = blk(x)
if self.downsample is not None:
x = self.downsample(x)
#x: b h w c -> b h/2*w/2 2c
print('basic_layer:{}'.format(x.shape))
return x
由图可知,basic_layer分为两个部分,patch_merging和swin_trans_block结构,对应代码里的downsample和 SwinTransformerBlock()
downsample在代码里为需传入参数,在swin_trans里,basic_layer配置如下:
BasicLayer(
input_resolution=(patches_resolution[0] // (2 ** i_layer),
patches_resolution[1] // (2 ** i_layer)),
window_size=window_size,
downsample=PatchMerging if (i_layer < self.num_layers - 1) else None,)
#如果不是在最后一层,就进行patchmerging操作
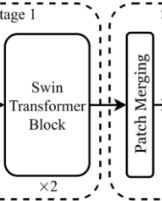
之所以放这样结构的图,是因为逻辑判断中,在basic_layer中,会先通过block再接patch_merging层,然后在最后一层中不使用patch_merging。
PatchMerging
每个阶段,分割模块
class PatchMerging(nn.Module):
def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):
super().__init__()
self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
self.norm = norm_layer(4 * dim)
def forward(self, x):
"""
x: B, H*W, C
"""
H, W = self.input_resolution
B, L, C = x.shape
x = x.view(B, H, W, C)
x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C
x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C
x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C
x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C
x = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C
x = x.view(B, -1, 4 * C) # B H/2*W/2 4*C
x = self.norm(x)
x = self.reduction(x)
#通过reduction,x: b h/2*w/2 2c,即实现了降维的操作,并降低了宽高的特征大小
return x
这代码有点奇特。通过步长+concat的方式,将b h w c -> b h/2w/2 4c,并通过一个全连接进行降维4d->2d,即最后,维度为 b h/2*w/2 2c
SwinTransformerBlock
核心的block代码,包含windows-attention和shfit-windows-attention。
这块代码暂时先不更了,博主先跑跑看,核心代码贴下面(如果你是希望替换模块,这里也就不需要继续看了,通过上面的信息,基本可以替换需要的模块)
class SwinTransformerBlock(nn.Module):
r""" Swin Transformer Block.
Args:
dim (int): Number of input channels.
input_resolution (tuple[int]): Input resulotion.
num_heads (int): Number of attention heads.
window_size (int): Window size.
shift_size (int): Shift size for SW-MSA.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.
drop (float, optional): Dropout rate. Default: 0.0
attn_drop (float, optional): Attention dropout rate. Default: 0.0
drop_path (float, optional): Stochastic depth rate. Default: 0.0
act_layer (nn.Module, optional): Activation layer. Default: nn.GELU
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
"""
def __init__():
super().__init__()
if min(self.input_resolution) <= self.window_size:
# if window size is larger than input resolution, we don't partition windows
self.shift_size = 0
self.window_size = min(self.input_resolution)
assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
self.norm1 = norm_layer(dim)
self.attn = WindowAttention()
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp()
if self.shift_size > 0:
# calculate attention mask for SW-MSA
H, W = self.input_resolution
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
else:
attn_mask = None
self.register_buffer("attn_mask", attn_mask)
def forward(self, x):
H, W = self.input_resolution
B, L, C = x.shape
assert L == H * W, "input feature has wrong size"
shortcut = x
x = self.norm1(x)
x = x.view(B, H, W, C)
# cyclic shift
if self.shift_size > 0:
shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
else:
shifted_x = x
# partition windows
x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
# W-MSA/SW-MSA
attn_windows = self.attn(x_windows, mask=self.attn_mask) # nW*B, window_size*window_size, C
# merge windows
attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
# reverse cyclic shift
if self.shift_size > 0:
x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
else:
x = shifted_x
x = x.view(B, H * W, C)
# FFN
x = shortcut + self.drop_path(x)
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
WindowAttention
包含shifted 和 non-shifted window attention结构
class WindowAttention(nn.Module):
r""" Window based multi-head self attention (W-MSA) module with relative position bias.
It supports both of shifted and non-shifted window.
Args:
dim (int): Number of input channels.
window_size (tuple[int]): The height and width of the window.
num_heads (int): Number of attention heads.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set
attn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0
proj_drop (float, optional): Dropout ratio of output. Default: 0.0
"""
def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
super().__init__()
self.dim = dim
self.window_size = window_size # Wh, Ww
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
# define a parameter table of relative position bias
self.relative_position_bias_table = nn.Parameter(
torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
# get pair-wise relative position index for each token inside the window
coords_h = torch.arange(self.window_size[0])
coords_w = torch.arange(self.window_size[1])
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += self.window_size[1] - 1
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
self.register_buffer("relative_position_index", relative_position_index)
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
trunc_normal_(self.relative_position_bias_table, std=.02)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x, mask=None):
"""
Args:
x: input features with shape of (num_windows*B, N, C)
mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None
"""
B_, N, C = x.shape
qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
q = q * self.scale
attn = (q @ k.transpose(-2, -1))
relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww
attn = attn + relative_position_bias.unsqueeze(0)
if mask is not None:
nW = mask.shape[0]
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N)
attn = self.softmax(attn)
else:
attn = self.softmax(attn)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x