pytorch官方demo(Lenet)学习笔记
pytorch官方demo(Lenet)学习笔记
讲解一个pytorch官方的demo实例(搭建Lenet并基于CIFAR10训练)
视频讲解来源:https://www.bilibili.com/video/BV187411T7Ye
up主的代码和ppt:https://github.com/WZMIAOMIAO/deep-learning-for-image-processing
一、项目简介
model.py ——构建一个LeNet网络模型
train.py ——加载数据集并训练模型
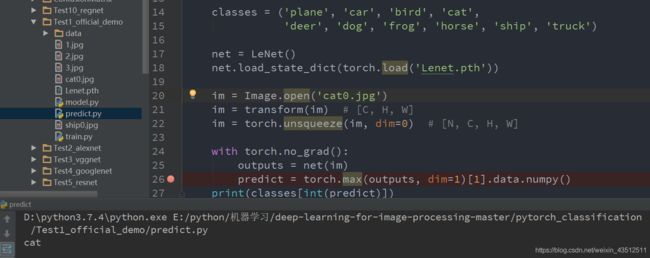
predict.py——使用训练好的模型,用自己找的图像进行分类测试
二、代码详情
model.py
import torch.nn as nn
import torch.nn.functional as F
class LeNet(nn.Module):
def __init__(self):
super(LeNet, self).__init__()
self.conv1 = nn.Conv2d(3, 16, 5)
self.pool1 = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(16, 32, 5)
self.pool2 = nn.MaxPool2d(2, 2)
self.fc1 = nn.Linear(32*5*5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
# 正向传播 实例化后输入参数自动调用
def forward(self, x):
x = F.relu(self.conv1(x)) # input(3, 32, 32) output(16, 28, 28)
x = self.pool1(x) # output(16, 14, 14)
x = F.relu(self.conv2(x)) # output(32, 10, 10)
x = self.pool2(x) # output(32, 5, 5)
x = x.view(-1, 32*5*5) # output(32*5*5)
x = F.relu(self.fc1(x)) # output(120)
x = F.relu(self.fc2(x)) # output(84)
x = self.fc3(x) # output(10)
return x
# import torch
# input1 = torch.rand([32, 3, 32, 32])
# model = LeNet()
# print(model)
# output = model(input1)
tensor对象通道排序:[batch, channel, height, width]
train.py
import torch
import torchvision
import torch.nn as nn
from model import LeNet
import torch.optim as optim
import torchvision.transforms as transforms
def main():
transform = transforms.Compose(
[transforms.ToTensor(), # 转化为tensor格式
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) # 归一化
# 50000张训练图片
# 第一次使用时要将download设置为True才会自动去下载数据集
train_set = torchvision.datasets.CIFAR10(root='./data', train=True,
download=False, transform=transform)
train_loader = torch.utils.data.DataLoader(train_set, batch_size=36,
shuffle=True, num_workers=0)
# 10000张验证图片
# 第一次使用时要将download设置为True才会自动去下载数据集
val_set = torchvision.datasets.CIFAR10(root='./data', train=False,
download=False, transform=transform)
val_loader = torch.utils.data.DataLoader(val_set, batch_size=10000,
shuffle=False, num_workers=0)
val_data_iter = iter(val_loader)
val_image, val_label = val_data_iter.next()
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
net = LeNet()
loss_function = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)
for epoch in range(10): # loop over the dataset multiple times
running_loss = 0.0
for step, data in enumerate(train_loader, start=0):
# get the inputs; data is a list of [inputs, labels]
inputs, labels = data
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = loss_function(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
if step % 500 == 499: # print every 500 mini-batches
with torch.no_grad():
outputs = net(val_image) # [batch, 10]
predict_y = torch.max(outputs, dim=1)[1]
accuracy = torch.eq(predict_y, val_label).sum().item() / val_label.size(0)
print('[%d, %5d] train_loss: %.3f test_accuracy: %.3f' %
(epoch + 1, step + 1, running_loss / 500, accuracy))
running_loss = 0.0
print('Finished Training')
save_path = './Lenet.pth'
torch.save(net.state_dict(), save_path)
if __name__ == '__main__':
main()
predict
import torch
import torchvision.transforms as transforms
from PIL import Image
from model import LeNet
def main():
transform = transforms.Compose(
[transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
net = LeNet()
net.load_state_dict(torch.load('Lenet.pth'))
im = Image.open('ship0.jpg')
im = transform(im) # [C, H, W]
im = torch.unsqueeze(im, dim=0) # [N, C, H, W]
with torch.no_grad():
outputs = net(im)
predict = torch.max(outputs, dim=1)[1].data.numpy()
print(classes[int(predict)])
if __name__ == '__main__':
main()
三、预测结果

debug可看见所有类别的概率,ship的概率最高,判断成功