OpenCV(python版)识别滑块验证中的缺口
前言
验证码往往是爬虫路上的一只拦路虎,而其花样也是层出不穷:图片验证、滑块验证、交互式验证、行为验证等。随着OCR技术的成熟,图片验证已经渐渐淡出主流,而「滑块验证」越来越多地出现在大众视野。“这么厉害,这小子长啥样呢?”没错,它就长这损sai:

解决它的方法也很直观,首先找到缺口的位置(通常只需要X轴的位置),然后拖动滑块即可。今天kimol君将带领大家用python识别出滑块验证中的缺口位置。
一、缺口识别
识别图片中的缺口,主要是利用python中的图像处理库cv2,其安装方法如下:
pip install opencv-python以上方式可能安装失败,可以尝试以下方式:
python -m pip install opencv-python -i http://pypi.douban.com/simple/ --trusted-host pypi.douban.com
注:这里并不是“pip install cv2”哦~
1.读取图片
滑块验证的图片分为两部分,一个是背景图片:

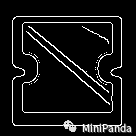
另一个是缺口图片:

利用imread函数将其读取:
# 读取背景图片和缺口图片
bg_img = cv2.imread('bg.jpg') # 背景图片
tp_img = cv2.imread('tp.png') # 缺口图片2.识别图片边缘
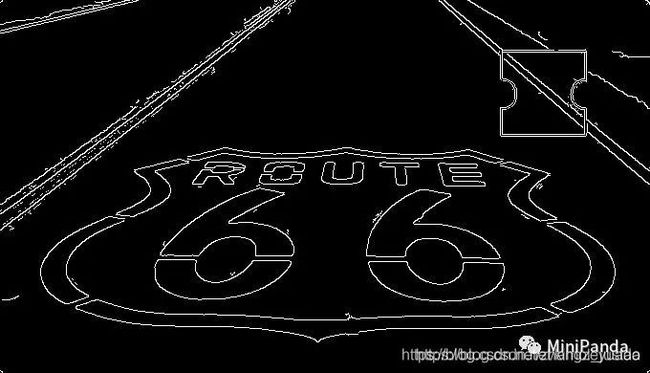
为了更好地将缺口与背景匹配,我们首先得识别出图片的边缘:
# 识别图片边缘
bg_edge = cv2.Canny(bg_img, 100, 200)
tp_edge = cv2.Canny(tp_img, 100, 200)这一步很关键!否则缺口匹配将不准确。
这里得到了图片边缘的灰度图,进一步将其图片格式转为RGB格式:
# 转换图片格式
bg_pic = cv2.cvtColor(bg_edge, cv2.COLOR_GRAY2RGB)
tp_pic = cv2.cvtColor(tp_edge, cv2.COLOR_GRAY2RGB)转换后的背景图为:
转换后的缺口图为:
3.缺口匹配
利用cv2中的matchTemplate函数,可以在背景图片中搜索对应的缺口,具体代码如下:
# 缺口匹配
res = cv2.matchTemplate(bg_pic, tp_pic, cv2.TM_CCOEFF_NORMED)res为每个位置的匹配结果,代表了匹配的概率,选出其中「概率最高」的点,即为缺口匹配的位置:
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res) # 寻找最优匹配min_val,max_val,min_loc,max_loc分别为匹配的最小值、匹配的最大值、最小值的位置、最大值的位置。ps.当然,这里完全可以自己写一个循环来实现,但是有现成的函数为什么不用呢?
至此,我们已经有了缺口的位置,其X轴坐标为:
X = max_loc[0]为了更直观地展示缺口的位置,我们将缺口用矩形框标注出来:
# 绘制方框
th, tw = tp_pic.shape[:2]
tl = max_loc # 左上角点的坐标
br = (tl[0]+tw,tl[1]+th) # 右下角点的坐标
cv2.rectangle(bg_img, tl, br, (0, 0, 255), 2) # 绘制矩形
cv2.imwrite('out.jpg', bg_img) # 保存在本地结果如下:

完美~ 收工!!!
二、完整代码
为了在实际应用中更方便的使用,我们将代码封装为一个函数:
def identify_gap(bg,tp,out):
'''
bg: 背景图片
tp: 缺口图片
out:输出图片
'''
# 读取背景图片和缺口图片
bg_img = cv2.imread(bg) # 背景图片
tp_img = cv2.imread(tp) # 缺口图片
# 识别图片边缘
bg_edge = cv2.Canny(bg_img, 100, 200)
tp_edge = cv2.Canny(tp_img, 100, 200)
# 转换图片格式
bg_pic = cv2.cvtColor(bg_edge, cv2.COLOR_GRAY2RGB)
tp_pic = cv2.cvtColor(tp_edge, cv2.COLOR_GRAY2RGB)
# 缺口匹配
res = cv2.matchTemplate(bg_pic, tp_pic, cv2.TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res) # 寻找最优匹配
# 绘制方框
th, tw = tp_pic.shape[:2]
tl = max_loc # 左上角点的坐标
br = (tl[0]+tw,tl[1]+th) # 右下角点的坐标
cv2.rectangle(bg_img, tl, br, (0, 0, 255), 2) # 绘制矩形
cv2.imwrite(out, bg_img) # 保存在本地
# 返回缺口的X坐标
return tl[0] 这里选择了读取本地图片文件,在爬虫过程中其实不是特别方便。如果有感兴趣的小伙伴,可以自己改动一下,将输入改为图片流即可。
写在最后
本文至此便告于段落了,如果需要完整源码或者有任何建议都欢迎在评论区留言或私信。最后,感谢各位小伙伴的耐心阅读,咋们下次再会~