ROS学习(八)——参数的使用与编程方法
申明:ROS学习参考了古月居老师的Blibli视频,强烈推荐大家看视频学习,本博客仅记录自己的学习经历和心得,欢迎大家一起讨论!
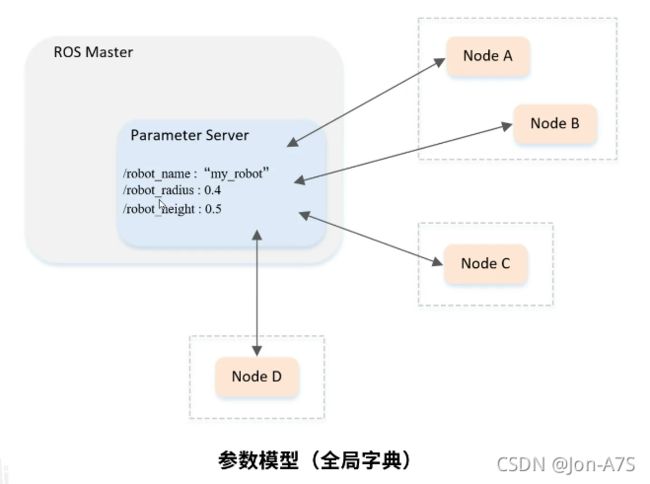
1 参数模型
2 创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_parameter roscpp rospy std_srvs
3 参数的命令行使用
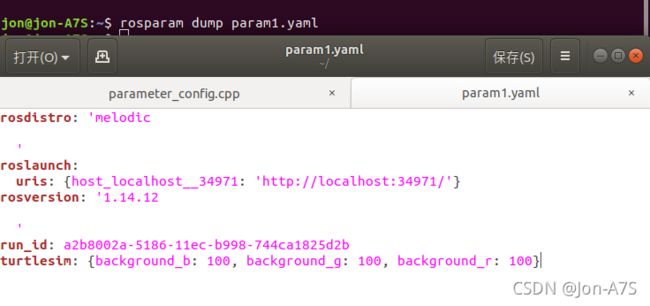
YAML参数文件
rosdistro: ‘melodic’
roslaunch: uris: {host_localhost__37751: ‘http://localhost:37751/’}
rosversion: ‘1.14.12’
run_id: dfc9b678-5124-11ec-b998-744ca1825d2b
turtlesim: {background_b: 0, background_g: 0, background_r: 0}
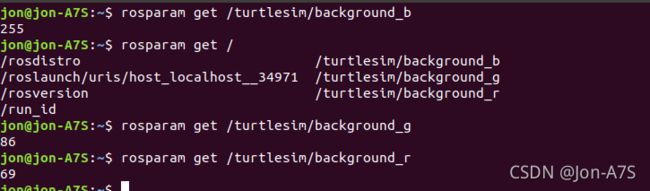
- 列出当前所有的参数
$ rosparam list

- 显示某个参数值
$ rosparam get param_key
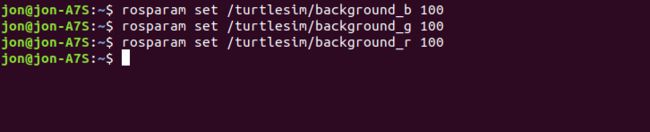
- 设置某个参数值
$ rosparam set param_key param_value
刷新参数:$ rosservice call /clear {}

- 保存参数到文件
$ rosparam dump file_name
- 加载参数文件
$ rosparam load file_name

$ rosparam load param1.yaml
$ rosparam get /turtlesim/background_b
$ rosparam get /turtlesim/background_g
$ rosparam get /turtlesim/background_r

- 删除某个参数
$ rosparam delete param_key

4 C++文件操作
文件编写如下:
/**
* 该例程设置/读取海龟例程中的参数
*/
#include 5 Python文件操作
文件编写如下:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程设置/读取海龟例程中的参数
import sys
import rospy
from std_srvs.srv import Empty
def parameter_config():
# ROS节点初始化
rospy.init_node('parameter_config', anonymous=True)
# 读取背景颜色参数
red = rospy.get_param('/turtlesim/background_r')
green = rospy.get_param('/turtlesim/background_g')
blue = rospy.get_param('/turtlesim/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 设置背景颜色参数
rospy.set_param("/turtlesim/background_r", 255);
rospy.set_param("/turtlesim/background_g", 255);
rospy.set_param("/turtlesim/background_b", 255);
rospy.loginfo("Set Backgroud Color[255, 255, 255]");
# 读取背景颜色参数
red = rospy.get_param('/turtlesim/background_r')
green = rospy.get_param('/turtlesim/background_g')
blue = rospy.get_param('/turtlesim/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/clear')
try:
clear_background = rospy.ServiceProxy('/clear', Empty)
# 请求服务调用,输入请求数据
response = clear_background()
return response
except rospy.ServiceException, e:
print "Service call failed: %s"%e
if __name__ == "__main__":
parameter_config()
6 程序运行结果

"怕什么真理无穷,进一寸有一寸的欢喜!"本讲完,继续加油!