pinctrl子系统初始化RGB灯
文章目录
- 系列文章目录
- 前言
- 正文
-
- 引入
- iomuxc节点:pinctrl子系统初窥
-
- iomuxc节点
- 节点引脚配置方式
- 节点配置信息记录
- pinctrl子系统实验:RGB灯引脚初始化
-
- platform设备引脚初始化
- RGB灯引脚状态初始化
-
- iomuxc节点添加引脚配置信息
- rgb_led节点添加引脚状态
- 代码示例
- 总结
系列文章目录
Linux字符设备驱动详解
Linux字符设备驱动详解二(使用设备驱动模型)
Linux字符设备驱动详解三(使用class)
Linux字符设备驱动详解四(使用自属的xbus驱动总线)
Linux字符设备驱动详解五(使用platform虚拟平台总线)
Linux字符设备驱动详解六(设备树实现RGB灯驱动)
Linux字符设备驱动详解七(“插件“设备树实现RGB灯驱动)
前言
通过前面的七篇文章,我们学习到在控制一个硬件外设的时候,需要获取外设所使用的的GPIO,然后去查询芯片手册相关的寄存器,然后通过控制寄存器才能控制相应的外设。使用直接操作寄存器的方法编写驱动,很明显这样子的开发方式效率很低,而且写程序也很麻烦,于是引入pinctrl子系统来解决这个问题。
正文
引入
ARM SoC提供了十分丰富的硬件接口,而接口物理上的表现就是一个个的pin(或者叫做pad, finger等)。为了实现丰富的硬件功能,SoC的pin需要实现复用功能,即单独的pin需要提供不同功能,例如,pin0既可以作为GPIO,可以也用于i2c的SCL,通过pin相关的复用寄存器来切换不同的功能。除此之外,软件还可以通过寄存器配置pin相关的电气特性,例如,上拉/下拉、驱动能力、开漏等。
Linux kernel 3.0之前的内核,对于pin的功能配置都是通过目标板的配置文件(arch/arm/mach-*)来初始化的,这种配置方式比较繁琐,十分容易出现问题(例如,pin的功能配置冲突)。所以,Linux kernel 3.0之后,实现了DT的板级配置信息管理机制,大大改善了对于pin的配置方式,随之一起实现的就是pinctrl子系统。
pinctrl子系统主要负责以下功能:
1、枚举、命名通过板级DTS配置的所有pin;
2、对于pin实现复用功能;
3、配置pin的电器特性,例如,上拉/下拉、驱动能力、开漏等。
进一步理解,无论是哪种芯片,都有类似下图的结构:

要想让pinA、B用于GPIO,需要设置IOMUX让它们连接到GPIO模块,要想让pinA、B用于I2C,需要设置IOMUX让它们连接到I2C模块。
所以GPIO、I2C应该是并列的关系,它们能够使用之前,需要设置IOMUX。有时候并不仅仅是设置IOMUX,还要配置引脚,比如上拉、下拉、开漏等等。
现在的芯片动辄几百个引脚,在使用到GPIO功能时,让你一个引脚一个引脚去找对应的寄存器很明显不行。术业有专攻,这些累活就让芯片厂家的BSP工程师。作为驱动工程师需要在他们的基础上开发。
所以,要把引脚的复用、配置抽出来,做成Pinctrl子系统,给GPIO、I2C等模块使用。BSP工程师要做什么?如下图:
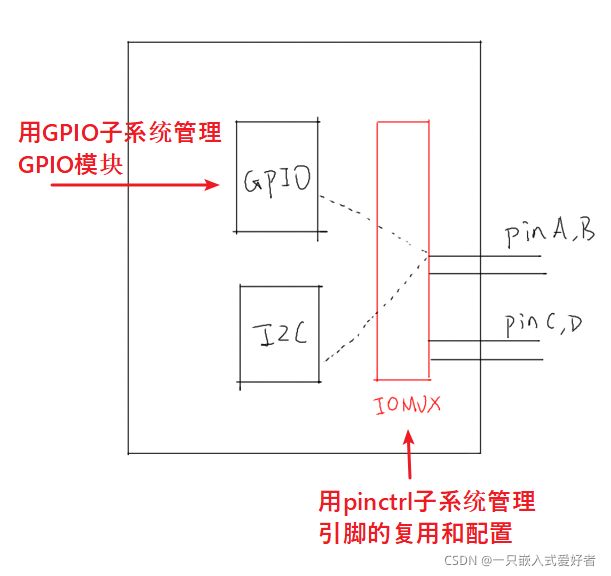
等BSP工程师在GPIO子系统、Pinctrl子系统中把自家芯片的支持加进去后,我们就可以非常方便地使用这些引脚了。
GPIO模块在图中跟I2C不是并列的吗?干嘛在讲Pinctrl时还把GPIO子系统拉进来?大多数的芯片,没有单独的IOMUX模块,引脚的复用、配置等等,就是在GPIO模块内部实现的。在硬件上GPIO和Pinctrl是如此密切相关,在软件上它们的关系也非常密切。所以这2个子系统一般都一起讲解。
关于这两个子系统之间的关系,这两个子系统是软件上面的概念,属于Linux内核的一部分。但最终要用起来,都是要与实际硬件挂钩,具体理解可以参照下图:

我们要操控一个引脚需要配置两个模块的寄存器:GPIO模块及IOMUXC模块。IOMUXC模块是用来配置引脚功能及一些引脚参数(引脚速率、上下拉等);GPIO模块用于配置引脚的输入输出等。其中,pinctrl子系统管理的是IOMUXC模块;gpio子系统管理的是GPIO模块。
所以综上来说,在嵌入式Linux开发中,像前面笔记中的那几种led驱动方式(与寄存器打交道)基本上是用不上的。Linux内核提供了pinctrl 和 gpio 子系统用于引脚的驱动,这样我们可以避免与寄存器打交道。
iomuxc节点:pinctrl子系统初窥
- 汇总所需引脚的配置信息
- pinctrl子系统预存iomux节点信息
iomuxc节点
imx6ull.dtsi
iomuxc: iomuxc@20e0000 {
compatible = "fsl,imx6ul-iomuxc";
reg = <0x20e0000 0x4000>;
};
- compatible:与pinctrl子系统的平台驱动做匹配
- reg:引脚配置寄存器的基地址
imx6ull-seeed-npi.dts
&iomuxc {
pinctrl-names = "default","init","sleep";
pinctrl-0 = <&pinctrl_hog_1>;
pinctrl-1 =<&xxx>;
pinctrl-2 =<&yyy>;
...
pinctrl_uart1: uart1grp {
fsl,pins = <
MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX 0x1b0b1
MX6UL_PAD_UART1_RX_DATA__UART1_DCE_RX 0x1b0b1
>;
};
...
}
节点引脚配置方式
- pinctrl-names:定义引脚状态
- pinctrl-0:定义第0种状态需要使用到的引脚,可引用其他节点标识
- pinctrl-1:定义第1种状态需要使用到的引脚,以此类推
- …
节点配置信息记录
fsl,pins
- 结合imx6ull的pinctrl子系统驱动使用
- 以该属性来标识引脚的配置信息
fsl,pins属性值
一个宏+一个十六进制数
MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX 0x1b0b1
宏定义原型
imx6ull.dtsi ->#include “imx6ull-pinfunc.h”->#include “imx6ul-pinfunc.h”
#define MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX 0x0084 0x0310 0x0000 0 0
宏值含义
<mux_reg conf_reg input_reg mux_mode input_val>
0x0084 0x0310 0x0000 0x0 0x0
mux_reg:引脚复用设置寄存器

conf_reg:引脚属性设置寄存器
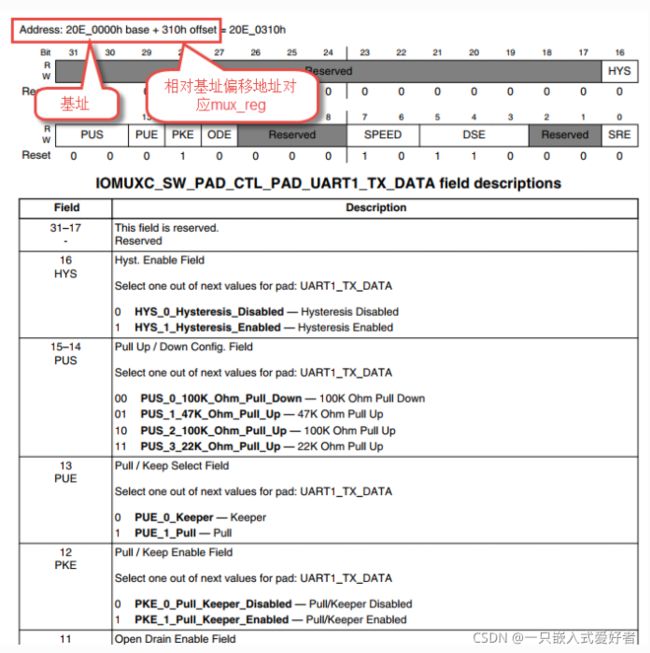 input_reg:引脚输入设置寄存器
input_reg:引脚输入设置寄存器

- 引脚需要输入功能时设置
- mux_mode:复用寄存器设置值
- 设置引脚复用
- input_value:输入寄存器设置值
- 设置引脚输入特性
十六进制数
属性寄存器设置值
- 特性复杂,独立设置
pinctrl子系统实验:RGB灯引脚初始化
platform设备引脚初始化
注册平台设备或者平台驱动
RGB灯引脚状态初始化
相比较前两篇文章,即相比较设备树和插件设备树,通过pinctrl子系统点灯,传统设备树imx6ull-speed-npi.dts文件多了以下两部分
iomuxc节点添加引脚配置信息
pinctrl_rgb_led:rgb_led{
fsl,pins = <
MX6UL_PAD_GPIO1_IO04__GPIO1_IO04 0x000010B1
MX6UL_PAD_CSI_HSYNC__GPIO4_IO20 0x000010B1
MX6UL_PAD_CSI_VSYNC__GPIO4_IO19 0x000010B1
>;
};
rgb_led节点添加引脚状态
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_rgb_led>;
代码示例
以野火代码为例
dts_led.c文件删去了引脚配置初始化相关的代码,如下(实际只能删去红色框中代码,全删对本文测试无影响),之所以删去是因为初始化的部分工作我们通过iomuxc节点和pinctrl子系统机制帮助我们完成了。

dts_led.c
#include 总结
同样的,将传统设备树imx6ull-speed-npi.dts编译为rgb.dtbo插件设备树,将其加载到内核中,加载完成后就使用以下命令查看设备树,此时可以在设备数中看到新增了rgb_led节点。
ls /sys/firmware/devicetree/base
或者
ls /proc/device-tree
再编译dts_led.c源文件为dto.led.ko内核模块并加载进内核。这时就有了/dev/rgb_led节点,最后向/dev/rgb_led节点写入数据就能控制rgb灯了。
sudo sh -c "ecoh '1' >/dev/rgb_led"
亮蓝灯
sudo sh -c "ecoh '2' >/dev/rgb_led"
亮绿灯
sudo sh -c "ecoh '4' >/dev/rgb_led"
亮红灯
sudo sh -c "ecoh '7' >/dev/rgb_led"
全亮
参考:
【深度】GPIO和Pinctrl子系统的使用–韦东山
【Linux笔记】Pinctrl子系统与GPIO子系统–嵌入式大杂烩
Linux内核之pinctrl子系统
L2.Pinctrl子系统