Python+OpenCv实现图像边缘检测(滑动调节阈值)
Python+OpenCv实现图像边缘检测(滑动调节阈值)
- 一、前言
- 二、导入模块
- 三、核心代码
-
- 1.图像预处理
- 2.滑动调参
- 3.边缘检测
- 4.图像保存
- 5.主函数
- 四、运行结果
- 五、完整代码
- 六、程序打包
一、前言
闲来无事,帮阿婆主室友处理图像。花了一天时间研究cv2中的几个函数,参考其他博主的优秀代码,在此基础上杂糅丰富,制作了一个图像边缘检测程序,通过滑动条实时调节阈值和其他参数,并能选择是否保存图像。最后通过pyinstaller将程序打包成.exe文件发送给室友使用。
(第一次学习图像处理和第一次撰写文章,如有错误,欢迎指正)
二、导入模块
使用 cv2 模块(opencv-python)
在终端中输入指令:pip install opencv-python 安装 cv2
安装成功后导入 cv2
import cv2
三、核心代码
1.图像预处理
输入三个参数,当标志位为1时表示使用该方法处理图像
默认采用 高斯滤波+直方图均衡化 的方法
def image_processing(img, Gauss_flag=1, Color_flag=1, Gray_flag=0): # 图像预处理
# 高斯滤波器平滑图像
if Gauss_flag == 1:
img = cv2.GaussianBlur(img, (3, 3), 0)
# 均衡彩色图像的直方图
if Color_flag == 1:
img = cv2.cvtColor(img, cv2.COLOR_BGR2YUV)
# 将彩色图像转为灰度图像,均衡灰度图像的直方图
if Gray_flag == 1:
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img = cv2.equalizeHist(img)
return img
2.滑动调参
创建滑动条,分别控制cv2.Canny函数中的各个参数
Canny(image, threshold1, threshold2, edges=None, apertureSize=None, L2gradient=None)
cv2.createTrackbar('threshold1', 'Canny', 50, 300, nothing) # 阈值1
cv2.createTrackbar('threshold2', 'Canny', 100, 300, nothing) # 较大的阈值2用于检测图像中明显的边缘
cv2.createTrackbar('apertureSize', 'Canny', 0, 2, nothing) # Sobel算子大小(3,5,7)
cv2.createTrackbar('L2gradient', 'Canny', 0, 1, nothing) # 参数(布尔值):true:使用更精确的L2范数(两个方向的倒数的平方和再开放),false:使用L1范数(直接将两个方向导数的绝对值相加)
实时读取并返回滑动条所在位置的值
threshold1 = cv2.getTrackbarPos('threshold1', 'Canny') # 阈值1
threshold2 = cv2.getTrackbarPos('threshold2', 'Canny') # 阈值2
L2gradient = cv2.getTrackbarPos('L2gradient', 'Canny') # 参数
aperturesize = cv2.getTrackbarPos('apertureSize', 'Canny') # Sobel算子大小
size = aperturesize * 2 + 3 # Sobel算子大小(3,5,7)
3.边缘检测
使用cv2中的Canny函数进行边缘检测,并通过窗口显示图像
# Canny边缘检测
img_edges = cv2.Canny(img, threshold1, threshold2, apertureSize=size, L2gradient=L2gradient)
# 显示边缘化图像
cv2.imshow('Canny', img_edges)
4.图像保存
检测按键,按q退出,不保存图像;按s退出,保存图像。
(保存的图像路径与原图像相同,名命为output.jpg)
if cv2.waitKey(1) == ord('q'): # 退出
break
elif cv2.waitKey(1) == ord('s'): # 保存图像
cv2.imwrite('\\'.join(img_path.split('\\')[:-1]) + '\\output.jpg', img_edges)
print("图像成功保存")
break
5.主函数
输入图像地址和图像预处理函数的三个参数。
先对图像进行预处理,然后进行边缘检测。
if __name__ == "__main__":
img_path = input("请输入图片地址(如E:\\Code\\xx.jpg):")
guass_flag = int(input("是否进行高斯滤波(输入1进行,输入0不进行):"))
color_flag = int(input("是否均衡彩色图像(输入1进行,输入0不进行):"))
gray_flag = int(input("是否均衡灰度图像(输入1进行,输入0不进行):"))
# 载入图像
image = cv2.imread(img_path)
# 图像预处理
img = image_processing(image, Gauss_flag=guass_flag, Color_flag=color_flag, Gray_flag=gray_flag)
# 显示原图像
cv2.imshow('Original', image)
# 显示预处理后图像
cv2.imshow('Pretreatment', img)
# 图像边缘检测
image_canny(img)
四、运行结果
原图像:
预处理后图像:

图像边缘检测:
保存后图像:

五、完整代码
import cv2
def nothing(): # 定义回调函数
pass
def image_processing(img, Gauss_flag=1, Color_flag=1, Gray_flag=0): # 图像预处理
# 高斯滤波器平滑图像
if Gauss_flag == 1:
img = cv2.GaussianBlur(img, (3, 3), 0)
# 均衡彩色图像的直方图
if Color_flag == 1:
img = cv2.cvtColor(img, cv2.COLOR_BGR2YUV)
# 均衡灰度图像的直方图
if Gray_flag == 1:
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 将彩色图像转为灰度图像
img = cv2.equalizeHist(img)
return img
def image_canny(img): # 图像边缘检测
# 设置窗口
cv2.namedWindow('Canny')
# 创建滑动条,分别控制各个参数
cv2.createTrackbar('threshold1', 'Canny', 50, 300, nothing) # 阈值1
cv2.createTrackbar('threshold2', 'Canny', 100, 300, nothing) # 较大的阈值2用于检测图像中明显的边缘
# cv2.createTrackbar('apertureSize', 'Canny', 0, 2, nothing) # Sobel算子大小(3,5,7)
cv2.createTrackbar('L2gradient', 'Canny', 0, 1,
nothing) # 参数(布尔值):true:使用更精确的L2范数(两个方向的倒数的平方和再开放),false:使用L1范数(直接将两个方向导数的绝对值相加)
while (1):
# 返回滑动条所在位置的值
threshold1 = cv2.getTrackbarPos('threshold1', 'Canny') # 阈值1
threshold2 = cv2.getTrackbarPos('threshold2', 'Canny') # 阈值2
L2gradient = cv2.getTrackbarPos('L2gradient', 'Canny') # 参数
# aperturesize = cv2.getTrackbarPos('apertureSize', 'Canny') # Sobel算子大小
# size = aperturesize * 2 + 3 # Sobel算子大小(3,5,7)
# Canny边缘检测
img_edges = cv2.Canny(img, threshold1, threshold2, L2gradient=L2gradient)
# 显示边缘化图像
cv2.imshow('Canny', img_edges)
if cv2.waitKey(1) == ord('q'): # 按q退出
break
elif cv2.waitKey(1) == ord('s'): # 按s保存图像到原图像所在目录,命名为output.jpg,再退出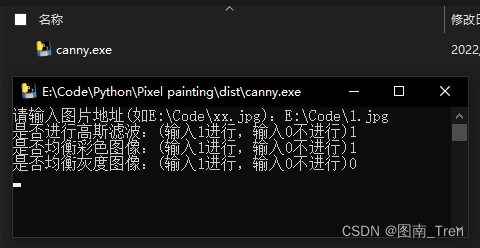
cv2.imwrite('\\'.join(img_path.split('\\')[:-1]) + '\\output.jpg', img_edges)
print("图像成功保存")
break
cv2.destroyAllWindows()
if __name__ == "__main__":
img_path = input("请输入图片地址(如E:\\Code\\xx.jpg):") # 输入原图像地址
guass_flag = int(input("是否进行高斯滤波(输入1进行,输入0不进行):")) # 输入1为进行高斯滤波,输入0为不进行
color_flag = int(input("是否均衡彩色图像(输入1进行,输入0不进行):")) # 输入1为进行彩色图像均衡,输入0为不进行
gray_flag = int(input("是否均衡灰度图像(输入1进行,输入0不进行):")) # 输入1为进行灰度图像均衡,输入0为不进行
# 载入图像
image = cv2.imread(img_path)
# 图像预处理
img = image_processing(image, Gauss_flag=guass_flag, Color_flag=color_flag, Gray_flag=gray_flag)
# 显示原图像
cv2.imshow('Original', image)
# 显示预处理后图像
cv2.imshow('Pretreatment', img)
# 图像边缘检测
image_canny(img)
六、程序打包
在终端中输入指令:pip install pyinstaller 安装 pyinstaller
安装成功后输入指令:pyinstaller -F canny.py 进行文件打包


