本文是基于golang1.8版本阐述的内容,有可能与最新版本存在较大的差异,比如文中关于goroutine scheduler的结果只提到M和G,后续的版本引入了结构P来拆解对应设计的复杂度等等。
前言
目前的线程实现模型主要的有三种:用户级别、内核级别、两级级别,最大的差异在于线程与内核调度实体(KSE)间的对应关系(内核调度实体也称为内核级线程,是操作系统内核的最小调度单元)。
1、用户级别
通过使用线程库来管理线程,并且该线程库并不是内核的一部分,隶属于用户级别,只存在进程的用户空间内,这样就带来了使用的这些线程对内核来说无感知的,也不是内核调度器的调度对象。关于这些线程的管理和协调完全是用户级程序的行为,与内核无关:应用程序对线程的创建、终止、切换或同步的操作,都不需要CPU从用户态切换到内核态。在该模型下,对内核调度器来说:进程就是一个无法再分割的调度单元,无论其存在多少个线程。任何一个操作的阻塞就意味着其所属的进程也会被阻塞。
该线程模型的优劣势:
- 优势:
1、对于线程操作的速度会存在一定的优势;
2、在线程管理方面不需要内核的参与,也就保证程序的可移植性更强些; - 劣势:
1、缺乏内核对线程的管理会导致多线程不能真正并发执行;
2、线程的优先级变得没有意义,同一进程中所有的线程优先级只能由该进程优先级来体现,再加上线程库对线程的调度是脱离内核控制,内核为进程设定的优先级就对线程的优先级没有影响;
2、内核级别
不同于签名用户级别模型,该模型下的线程是由内核进行管理的,关于线程的创建、终止、同步等操作都通过内核提供的syscall来完成的。每个内核调度实体(KSE)对应一个线程,这样可以实现线程的并发运行,内核可以在不同的时间片内让CPU来运行不同的线程,快速切换并运行各个线程,使得看起来像在同时运行。当该模型下的某一个线程的阻塞并不会影响其他的线程(排除存在同步关系的线程)
该模型的优劣势:
- 优势
1、能够实现线程的并发运行,所有的线程管理交由内核来完成
2、线程的优先级可有内核来进行设定、管理; - 劣势
1、带来运行线程的暂停,不同线程的上下文的切换;内核线程的管理成本相对高了不少,内核资源的消耗增加;同时大量的线程也会带来内核调度的负担;
2、程序的可移植行变弱,不同的系统内核存在差异化;
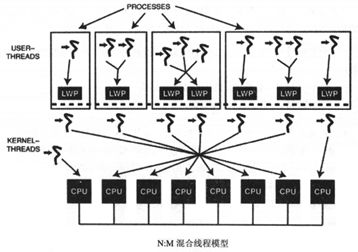
3、两级线程模型
两级线程模型是在前面两种线程模型的基础上,取其精华,去其糟粕而衍生出来的,在此模型下,一个进程可以与多个内核调度实体(KSE),在这点与内核级线程模型相似,不同的是两级线程模型下进程中的线程并不与内核调度实体(KSE)一一对应,而是将线程映射到同一个内核调度实体(KSE)上:
线程库通过内核来创建多个内核级别线程,接下来针对这些应用程序线程的调度是由前面创建的内核级线程来完成的,而这些应用程序线程多数情况动态的与内核级线程关联,导致线程的管理也是由内核和线程库共同协作来完成的,稍微有些复杂,不过却使得内核资源消耗大大减少,线程管理的效能也得以提升。
=============== 以下为论文内容开始 =================
ABSTRACT 摘要
The Go runtime, as well as the most recently proposed changes to it, draw from previous work to improve scalability and performance. In this paper we explore several examples of previous research, some that have actively influenced the Go runtime, and others that are based on similar guiding principles. We propose additional extensions to the runtime based on contention aware scheduling techniques. We also discuss how such changes would not only leverage the proposed improvements currently in the works, but how they can potentially improve the effectiveness of the runtime’s scheduling algorithm.
1. INTRODUCTION
The model of computation used by the Go language is based upon the idea of communicating sequential processes put forth by C.A.R. Hoare in his seminal paper published in 1978 [10]. Go is a high level language with many of the constructs proposed in Hoare’s paper, which are not found in the C family of languages, and are easier to reason about than locks and semaphores protecting shared memory. Go provides support for concurrency through goroutines, which are extremely lightweight in comparison to threads, but can also execute independently. These goroutines communicate through a construct known as channels, which are essentially synchronized message queues. The use of channels for communication, as well as first class support for closures, are powerful tools that can be utilized to solve complex problems in a straightforward manner.
Go is a relatively young language, and its first stable version was released recently[8]. It is still under development, and many improvements are still being made to the language, especially to its compilers and infrastructure. In addition to the contributions of Hoare and the languages that have preceded Go, there is a wealth of other information and research that could be beneficial if applied to the Go runtime. During the course of our research we have come across many papers that share similarities with the implementation of Go, as well as some papers detailing algorithms and solutions that could easily be applied to Go. Based on this research, we have formulated an extension to the Go runtime that we elieve could improve the implementation that has been proposed by Dmitry Vyukov [13].
In this paper, we are mainly concerned with exploring Go’s runtime scheduler. We are interested in Go’s runtime in part because we believe that relatively simple modifications to this module can result in significant performance gains. The contributions of this paper are an explanation and analysis of the Go runtime scheduler, a brief overview of existing research that relates to the Go runtime scheduler, and a proposal for an extension to the scheduler.
Section 2 presents a brief history of the Go language. We then explore the implementation of the runtime scheduler in section 3, as well as some of its current limitations in section 4. The changes that have been proposed to address the scheduler’s limitations are detailed in section 5. Section 6 then describes several research papers that are applicable to the Go runtime. We then discuss the persistence of good ideas in section 7 and offer a proposal for the extension of the Go runtime in section 8. The paper concludes in section 9.
2. A BRIEF HISTORY OF GO
Hoare’s paper, entitled“Communicating Sequential Processes” [10] was published before multiple processors in a single machine were commonplace. Many researchers, including Hoare, saw the precursors to this trend and tackled research questions that would need to be answered before multi-core processors could become ubiquitous. Hoare saw potential problems with communication between processes executing concurrently on separate processors. The model at the time for communication included many of the same primitives for thread communication today; namely, modifying shared memory with the assistance of locking mechanisms to protect critical regions. This model is difficult to reason about, and therefore, is prone to bugs and errors. Hoare’s proposed solution included a separate set of primitives to foster message passing between processes, instead of altering shared memory.
Many of the primitives used in Go can find their origin in Hoare’s CSP paper. For example, the use of Goroutines, channel communication, and even the select statement were described by Hoare (although referred to by different names). The CSP paper details many common computer science and logic problems, as well as their solutions using communicating processes. Some of the problems explored in the paper include computing factorials, the bounded buffer problem, dining philosophers, and matrix multiplication. Although Hoare’s notation is vastly different, the implementation of the solutions is very much the same as it would be in Go. At the time, Hoare’s proposal of CSP primitives was purely theoretical, but now that technology has advanced,
we can see that his ideas for concurrent processing were valuable and continue to be relevant almost 35 years later.
Newsqueak,a prominent member in the long line-up of CSP based languages developed at Bell Labs [4], had an important influence on Go. Rob Pike worked on several of these languages, and Newsqueak was the first in that family (Pan, Promela, Squeak) to have first class channels. This enabled the elegant composition of channels and functions to develop more complex communication structures. The study of the Newsqueak and its derivatives, such as Alef and Limbo, provides a fascinating view of language evolution, and one can trace the lineage of many of Go’s elegant constructs.
3. DISCUSSION OF THE GO RUNTIME
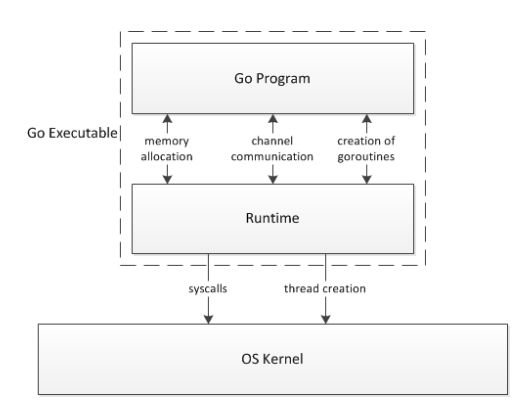
Go code通过Go compiler编译为对应的machine code,对应的runtime(C)会通过静态关联的方式完成与user code的关联;
当go程序在用户态空间以独立可运行的程序运行时,任意针对OS APIs的调用都是通过Runtime来承接的再有Runtime来真正完成call。
整个过程类似Figure 1图所示。
The Go Runtime manages scheduling, garbage collection, and the runtime environment for goroutines among other things. We will focus mainly on the scheduler, but in order to do that, a basic understanding of the runtime is needed. First we will discuss what the runtime is, especially in the context of how it relates to the underlying operating system and the Go code written by the programmer.
Go programs are compiled into machine code by the Go compiler infrastructure. Since Go provides high level constructs such as goroutines, channels and garbage collection, a runtime infrastructure is required to support these features. This runtime is C code that is statically linked to the compiled user code during the linking phase. Thus, a Go program appears as a standalone executable in the user space to the operating system. However, for the purpose of this paper, we can think of a Go program in execution as comprised of two discrete layers: the user code and the runtime, which interface through function calls to manage goroutines, channels and other high level constructs. Any calls the user code makes to the operating system’s APIs are intercepted by the runtime layer to facilitate scheduling, as well as garbage collection [9]. Figure 1 shows the relationship between a Go program, the Go runtime, and the underlying operating system.
struct G
{
byte∗ stackguard; // stack guard information
byte∗ stackbase; // base of stack
byte∗ stack0; // current stack pointer
byte∗ entry; // initial function
void∗ param; // passed parameter on wakeup
int16 status; // status
int32 goid; // unique id
M∗ lockedm; // used for locking M’s and G’s
...
};
Go Runtime会跟踪每个goroutine,会通过Process的线程池来调度这些goroutine运行,
需要注意的goroutine虽然与thread相似,但是两者却是独立的,是通过goroutine scheduler来完成goroutine被thread真正执行,这样能够实现真正意义上的并发。goroutine和thread的比例是大于1:1的,而goroutine是相对比较轻量级的,分配资源较少,通过与thread的绑定完成相应执行,有提升thread的物理资源利用。
Arguably, one of the more important aspects of the Go runtime is the goroutine scheduler. The runtime keeps track of each goroutine, and will schedule them to run in turn on a pool of threads belonging to the process. Goroutines are separate from threads but rely upon them to run, and scheduling goroutines onto threads effectively is crucial for the efficient performance of Go programs. The idea behind goroutines is that they are capable of running concurrently, like threads, but are also extremely lightweight in comparison. So, while there might be multiple threads created for a process running a Go program, the ratio of goroutines to threads should be much higher than 1-to-1. Multiple threads are often necessary to ensure that goroutines are not unnecessarily blocked. When one goroutine makes a blocking call, the thread running it must block. Therefore, at least one more thread should be created by the runtime to continue the execution of other goroutines that are not in blocking calls. Multiple threads are allowed to run in parallel up to a programmer defined maximum, which is stored in the variable GOMAXPROCS[6].
It is important to keep in mind that all the OS sees is a single user level process requesting and running multiple threads. The concept of scheduling goroutines onto these threads is merely a construct in the virtual environment of the runtime. When we refer to the Go runtime and scheduler in this paper we are referring to these higher level entities, which are completely separate from the operating system. In the Go runtime, there are three main C-structs that help keep track of everything and support the runtime and scheduler:
-
THE G STRUCT
G代表应用程序虚拟类似线程的东西,golang执行代码片段;本身包括自身堆栈信息及其状态
A G struct represents a single goroutine[9]. It contains the fields necessary to keep track of its stack and current status. It also contains references to the code that it is responsible for running.
-
THE M STRUCT
M代表内核物理线程的抽象表现,与内核工作线程一一对应,自身会有一个全局的G队列,存放分配给当前M需要运行G,M结构中字段也指定当前运行G、自身缓存、与之锁定的G等等
The M struct is the Go runtime’s representation of an OS thread[9]. It has pointers to fields such as the global queue of G’s, the G that it is currently running, its own cache, and a handle to the scheduler.
struct M
{
G∗ curg; // current running goroutine
int32 id; // unique id
int32 locks ; // locks held by this M
MCache ∗mcache; // cache for this thread
G∗ lockedg; // used for locking M’s and G’s
uintptr createstack [32]; // Stack that created this thread
M∗ nextwaitm; // next M waiting for lock
...
};
-
THE SCHED STRUCT
golang也有着其语言层面的调度程序,属于单一的、全局的;会跟踪不同的G队列和M对象以及调度运行的相关信息,而这些信息是为了完成应用程序的调度。针对G的存放会有两个地方一个用于提供给M运行的G队列,另外一个是存放处于空闲状态的G(当一个G执行完成后 并不会被立马消耗),而只会有一个由scheduler维护的M队列,而这个队列会处于idle状态,等待有需要的运行goroutine通过scheduler来分配对应的M来运行,在整个调度过程可能会存在对这些队列的修改,是需要使用通过全局调度lock来完成的,在Sched结构里能够看到整个全局锁Lock。
The Sched struct is a single, global struct[9] that keeps track of the different queues of G’s and M’s and some other information the scheduler needs in order to run, such as the global Sched lock. There are two queues containing G structs, one is the runnable queue where M’s can find work, and the other is a free list of G’s. There is only one queue pertaining to M’s that the scheduler maintains; the M’s in this queue are idle and waiting for work. In order to modify these queues, the global Sched lock must be held.
struct Sched {
Lock; // global sched lock .
// must be held to edit G or M queues
G ∗gfree; // available g’ s ( status == Gdead)
G ∗ghead; // g’ s waiting to run queue
G ∗gtail; // tail of g’ s waiting to run queue
int32 gwait; // number of g’s waiting to run
int32 gcount; // number of g’s that are alive
int32 grunning; // number of g’s running on cpu
// or in syscall
M ∗mhead; // m’s waiting for work
int32 mwait; // number of m’s waiting for work
int32 mcount; // number of m’s that have been created
...
}
runtime启动通过会涉及到几个Goroutine:一个负责GC的goroutine,另一个是负责调度的goroutine,还有用户代码对应的那个goroutine。首先创建一个M来启动Runtime,在整个程序的运行过程中会有更多的goroutine被创建,同时也需要更多的M来执行这些goroutine(由于目前系统层面的限制,活跃状态的M是不能超过GOMAXPROCS的限制,默认10000)由于M本身是等价内核线程,一个M是需要绑定运行一个goroutine的。所以当一个M没有绑定的G,此时就会从全局运行G队列获取一个G来执行对应的Go代码。若是Go代码执行系统IO操作,就需要当前M处于locked(一个G处于locked,对应的M也需要处于locked),此时会重新从全局M队列唤醒一个M来执行G,这样的就能确保其他的goroutine得到运行的机会,并不会因为一个M被locked导致其他goroutine都处于locked的。
The runtime starts out with several G’s. One is in charge of garbage collection, another is in charge of scheduling, and one represents the user’s Go code. Initially, one M is created to kick off the runtime. As the program progresses, more G’s may be created by the user’s Go program, and more M’s may become necessary to run all the G’s. As this happens, the runtime may provision additional threads up to GOMAXPROCS. Hence at any given time, there are at most GOMAXPROCS active M’s.
Since M’s represent threads, an M is required to run a goroutine. An M without a currently associated G will pick up a G from the global runnable queue and run the Go code belonging to that G. If the Go code requires the M to block, for instance by invoking a system call, then another M will be woken up from the global queue of idle M’s. This is done to ensure that goroutines, still capable of running, are not blocked from running by the lack of an available M.
系统调用会导致工作线程与内核打交道处于locked状态等系统调用的执行结果返回,那么执行代码片段对应的goroutine会处于locked,与其关联的那个M在系统执行结果返回之前是不能执行其他的Goroutine。不过当使用channel进行处理时关联的M是不会处于locked的,即使对应的goroutine在channal通信处于locked状态。对于操作系统来说是不知道channel的存在,对channal的处理是由runtime层面来完成的。一旦一个goroutine在进行channel调用,与之关联的M是不因为该G要被locked而被locked,此时G的状态会被设置=waiting,同时关联的M将会执行其他的G直到channal返回内容,此刻G的状态变成=back to runnable,等M能够来执行。
System calls force the calling thread to trap to the kernel, causing it to block for the duration of the system call execution. If the code associated with a G makes a blocking system call, the M running it will be unable to run it or any other G until the system call returns. M’s do not exhibit the same blocking behavior for channel communication, even though goroutines block on channel communication. The operating system does not know about channel communication, and the intricacies of channels are handled purely by the runtime. If a goroutine makes a channel call, it may need to block, but there is no reason that the M running that G should be forced to block as well. In a case such as this, the G’s status is set to waiting and the M that was previously running it continues running other G’s until the channel communication is complete. At that point the G’s status is set back to runnable and will be run as soon as there is an M capable of running it.
4. OPPORTUNITIES FOR IMPROVEMENT
现有的runtime scheduler相对来说是比较简单的,再加上golang语言的沉淀相对来说比较短,也就会导致runtime scheduler会带来一些性能问题:
- 1.在当前的runtime scheduler在设计方面对全局Sched lock过度依赖,在修改M队列和G队列甚至其他Sched结构相关的字段都需要全局Sched lock的参与,这样在一些“高吞吐的服务”、“并发计算的程序”等系统中无法带来良好的可拓展性,全局Sched锁过于重,产生诸多限制。
- 2.在现有的设计中M结构也存在一些缺陷:当一个M即使没有可执行的Goroutine时,仍然需要分配大小MCache=2MB的空间,对于一个当前不在执行Goroutine的M来说,是没有必要的。因为现有的golang语言层面对于M来说是无限制的,一旦在程序执行过程中产生了大量的M,就会导致性能的下降同时带来资源的浪费包括糟糕的数据局部性
- 3.目前的调度设计中关于系统调用过于复杂,过度的进行M的绑定和解锁,大量的浪费CPU的时间片
- 4.在M执行G时,会将G传递给其他的M来执行,就会产生大量的实例这样导致没必要的负载以及额外延迟。
The current runtime scheduler is relatively simplistic. The Go language itself is young, which means there has not been enough time for the implementation of the language to mature past the first release. The current scheduler gets the job done, but it’s simplicity lends it to performance problems. Four major problems with the current scheduler are addressed by Dmitry Vyukov in his design document[13] containing proposed improvements to the scheduler.
One problem is the scheduler’s excessive reliance on the global Sched lock. In order to modify the queues of M’s and G’s, or any other global Sched field for that matter, this single lock must be held. This creates some problems when dealing with larger systems, particularly “high throughput servers and parallel computational programs” [13], which causes the scheduler to not scale well.
Further problems rest with the M struct. Even when an M is not executing Go code, it is given an MCache of up to 2MB, which is often unnecessary, especially if that M is not currently executing a goroutine. If the number of idle M’s becomes too large it can cause significant performance loss due to “excessive resource loss ... and poor data locality”[13]. A third problem is that syscalls are not handled cleanly, which results in excessive blocking and unblocking of the M’s, further wasting CPU time. Lastly, there are currently too many instances where an M will pass a G off to another M for execution instead of running the G itself. This can lead to unnecessary overhead and additional latency.
5. VYUKOV’S PROPOSED CHANGES
针对目前runtime scheduler存在的一些缺陷,google的Dmitry Vyokov通过增加一层抽象:P,代表goroutine运行上下文,以前的结构M仍然是对操作系统线程的抽象,结构G也继续代表Goroutine,那么结构P就代表一个M来执行Goroutine所需要的资源。
结构P将原来存在M和Sched结构中的字段拿过来,比如MCache,同时每个P它会有自己的可运行G队列替换以前的全局G队列,通过结构P的本地G队列能够减轻全局调度锁的影响,将MCache移植到结构P中也减轻了原有结构M占用没必要的空间问题。再新建一个G时,将会放置P的本地队列的末尾,这样也能确保新建的G能够最终被执行。当结构P的队列中没有G可用,那么它就会随机选择一个P,将从该P处本地队列的尾部拿取一半的G,这样基于P的"偷取式"工作机制也就实现了.
当需要获取一个G来执行时,当前的M从队列中获取一个已经跟idle的M绑定G,首先会唤醒这个idle的M并将其关联的G和P给到idle的M。
而针对M不断的locked和unlocked,产生大量负载的情况,通过使用空旋转的方式替换现有的锁方式
-
- 一个关联P的idle M旋转寻找新的G
- 2.一个idle的M通过旋转等待可用的P
理论上在任意给定的时间内可进行空旋转的M<= GOMAXPROCS
需要注意的是:若是存在idle的M没有关联的P时,已经持有关联P的idle M是不能进行locked。
当处于一下三种情况时M是不能来执行G的:
1、新创建的G时
2、M进入系统调用
3、M的状态有idle ---> busy
一般来说至少会有一个M处于spining状态下,直至所有的P变成busy,通过这样方式来解决加锁和解锁带来的问题,并也保证了在有可用的G情况下,每个P有一个running的G,空旋转也能减轻了系统调用带来的负载问题。
对于一个新建的goroutine在非必要的情况不要分配对应的G和stack。这样可以减少goroutine的内存开销,通过引入P保证G的本地性,已运行过的G就会拥有自己关联的P包含MCache。同样对于M运行的G来说本地缓存会带来G与物理Processor的关联度,不过P对于操作系统来说是无感知的,P只不过是对runtime的抽象;而现代内核会提供很大关联在thread和物理处理器之间,M是对代表的内核线程,这样一旦G和M建立良好本地关联性会带来更好的缓存性能。
Dmitry Vyokov is an employee at Google. He published a document detailing some of the failings of the current runtime scheduler, as well as outlined future improvements to Go’s runtime scheduler [13]. This section contains a summary of his proposed changes.
One of Vyukov’s plans is to create a layer of abstraction. He proposes to include another struct, P, to simulate processors. An M would still represent an OS thread, and a G would still portray a goroutine. There are exactly GOMAXPROCS P’s, and a P would be another required resource for an M in order for that M to execute Go code.
The new P struct would steal many members of the previous M and Sched structs. For instance, the MCache is moved to the P struct, and each P would have a local queue of runnable G’s instead of there being a single global queue. Establishing these local queues helps with the earlier problem of the single global Sched lock, and moving the cache from M to P reduces the issue of space being unnecessarily wasted. Whenever a new G is created, it is placed at the back of the queue of the P on which it was created, thus ensuring that the new G will eventually run. Additionally, a work stealing algorithm is implemented on top of the P’s. When a P does not have any G’s in its queue, it will randomly pick a victim P and steal half of the G’s from the back of the victim’s queue. If, while searching for a G to run, an M encounters a G that is locked to an idle M, it will wake up the idle M and hand off its associated G and P to the previously idle M.
Another problem that Vyukov addresses is that of M’s continuously blocking and unblocking, which incurs a lot of overhead. Vyukov aims to reduce this overhead by employing spinning instead of blocking. He proposes two kinds of spinning [13]:
-
- an idle M with an associated P spins looking for new G’s,
-
- an M without an associated P spins waiting for available P’s.
There area at most GOMAXPROCS spinning M’s [at any given time]
- an M without an associated P spins waiting for available P’s.
Furthermore, any idle M’s that have associated P’s cannot block while there are idle M’s that do not hold P’s. There are three main events that can cause an M to be temporarily incapable of running Go code. These events are when a new G is spawned, an M enters a syscall, or an M transitions from idle to busy. Before becoming blocked for any of these reasons, the M must first ensure that there is at least one spinning M, unless all P’s are busy. This helps to solve the problem of the continuous blocking and unblocking and also makes sure that every P is currently involved with a running G, if there are runnable G’s available. Thus, the overhead involved in the syscalls is also reduced by employing spinning.
Vyukov also suggests not allocating the G and stack for a new goroutine unless they are really required. He notes that we require just six words for the creation of a goroutine that runs to completion without making function calls or allocating memory. This will significantly reduce the memory overhead for this class of goroutines. The other improvement suggested is to have better locality of G’s to P’s, since the P on which the G was last run will already have its MCache warmed up. Similarly, it would be beneficial to have better locality of G’s to M’s since that would result in better affinity between the G’s and the physical processors. We must remember that P’s are an abstraction created by the runtime that the OS knows nothing about, whereas M’s represent kernel threads. Most modern kernels will provide for affinity between threads and physical processors. Hence, better G to M locality will give us better cache performance.
6. RELATED WORK
During the course of our research, we came across several papers that contain solutions we believe could be useful if applied to the Go runtime. In this section we provide a brief overview of these papers, and describe how we envision those solutions could be leveraged.
6.1 Co-scheduling
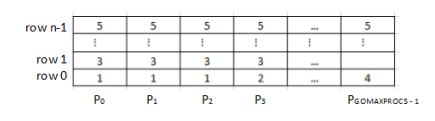
Scheduling Techniques for Concurrent Systems, written by John K. Ousterhout in 1982 [11], introduces the idea of coscheduling, or scheduling processes that communicate heavily during the same time slice. The paper discusses three different algorithms for scheduling process task forces, which are groups of processes that communicate heavily. The algorithm that can most readily be applied to the Go runtime is the paper’s matrix algorithm.
The matrix algorithm arranges the processors in an array, similar to the proposed global array of P’s in Go. A matrix is then created with a column corresponding to each P, as seen in figure 5. The number of rows is not specified by the paper, but we can assume that there will be sufficient rows to accommodate the algorithm. When a new process task force is created, the algorithm attempts to find the first row that will fit the entire task force such that each process is in its own cell. As seen in figure 5, task forces 1 and 2 fit into row 0. Task force 3 was too large to fit into the remaining space in row 0 and was consequently stored in row 1. Task force 4 was sufficiently small to fit into row 0 along with 1 and 2. The algorithm places processes in this matrix to better facilitate scheduling entire task forces at the same time. Assuming there are n rows, at time slice k, processes located in row (k%n) will be scheduled on the associated processors. If a processor is idle, whether because there is no process in the current task force for that processor or the currently running process has blocked, then a different process in that processor’s column in scheduled to run.
If Go’s P structs were used, instead of processors, this idea could work to schedule multiple goroutines that use the same channels simultaneously. This has the potential to reduce the time spent blocking M’s and G’s, however, this may require significant changes to the channel infrastructure.
6.2 Contention Aware Scheduling
6.2.1 Cache Conflicts and Processes
Threads executing on the same processor share cache space. Depending on the cache usage of each thread this sharing could be harmonious, or it could cause significant performance degradation. The idea presented by Blagodurov et al in [12] is to schedule threads so as to minimize cache contention on each processor. There are two main elements to such a system: the first is an algorithm to estimate the contention between threads, and the second is an algorithm to then schedule them effectively across processors.
Several algorithms were proposed in the paper to determine which threads were contentious. The most effective algorithm was one in which a profile of the cache was kept for each thread, and every cache access as well as cache miss was tracked. Picking threads to run on the same processor was accomplished by minimizing the overlap between cache usage among grouped threads. While this was the most effective solution it was also one of the most expensive. Cache miss rate was identified as a relatively effective and very efficient alternate measurement to predict cache contention between threads, and it could easily be monitored throughout the runtime of each process. The scheduling algorithm grouped threads so as to minimize the sum of cache miss rates on each processor, and assigned threads to a processor by manipulating the run queue.
6.2.2 Contention aware multithreading for Java
Xian et al[7] suggest an approach where the runtime scheduler proactively tries to reduce contention for locks between threads by clustering threads that compete for the same locks and then creating a linear schedule for each cluster. Each schedule can then be run on a separate processor. Their contention aware scheduler also gives higher priorities and execution quanta to threads holding locks, thus solving the problem of priority inversion.
The implementation of this contention aware scheduler is carried out by modifying the JVM as well as the Linux kernel. The JVM modifications include changes to record synchronization events, in the so called synchornization event vectors (or seVector’s for short). The seVector’s are then used to create the contention vectors (or conVector’s), which are a measure of the contention for each shared lock. The threads are grouped into clusters based on the similarity of their conVector’s, which is calculated based on a heuristic. The clustering algorithm also classifies the clusters into strong-contention or weak-contention clusters. Finally, the clusters are mapped to physical CPUs by their mapping algorithm, which attempts to balance the load across multiple CPUs by merging or splitting the weak contention clusters.
The kernel modifications include the addition of system calls to register Java threads, and to map them to CPUs. A separate contention aware scheduler which is used for scheduling Java threads is also added to the kernel. The scheduler uses a Critical Section First policy, which is an augmented priority based round robin policy, wherein thread priority is increased based on the number of locks that the thread holds, and higher priority threads get longer time quanta.
6.3 Occam π
The Occam π language is based on formalisms proposed in Milner’s π calculus and the communicating sequential processes proposed by Hoare. Ritson et al[3] implemented multicore scheduling for lightweight communicating processes in the Occam language back in 2009. They utilize runtime heuristics to group communicating processes into cache affine work units, which are then distributed among physical processors using wait free work stealing algorithms.
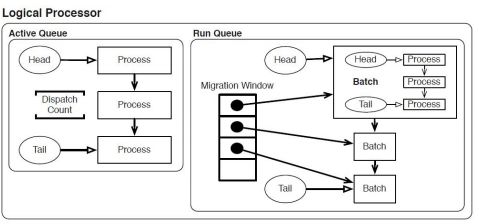
The state of a process is stored in its process descriptor. The model that they use for scheduling is as follows: Each physical processor has a one-to-one mapping with a logical processor. As defined by Ritson et al. in [3]:
The logical processor has a run queue, which is a linked list of batches. A batch is a linked list of process descriptors. The logical processor executes a batch by moving it to its active queue. A dispatch count is calculated based on the number of processes in a batch (multiplied by a constant) and bounded by the batch dispatch limit. The dispatch count is decremented each time a process is scheduled. When the dispatch count hits zero, any processes leftover in the active queue are moved to a new batch, which is added to the end of the run queue.
Batches are essentially groups of processes which are likely to access similar memory locations because they communicate or synchronize with each other. As discussed in section 6.2.2, threads (analogous to processes in this case) are considered highly contentious when they compete for the same locks. This contention manifests itself in the form of mutual exclusion or blocking on some communication primitive. We can form groups of processes which meet the condition that only one process in its group can be active at any given time. We also note that these groups are dynamic in nature and that their composition may change over time. Ritson et al postulate that if a batch can meet the condition of only one process capable of being active, it is probably optimal. Conversely, batches that do not satisfy this condition should be split, which can be implemented in constant time by putting the head process of the active queue in a new batch, and the remainder in a different one. The second claim made by Ritson et al is that repeated execution and split cycles will reduce large, unrelated batches into small, related batches.
The final feature that we will discuss about this paper is process migration: A process which blocks on communication or synchronization on one logical processor, A, can be woken up by a process running on a different logical processor, B. Unless prohibited by affinity settings, the woken up process continues execution on processor B. A logical processor which runs out of batches to execute may steal batches from other logical processors. However, the run queue is private to each logical processor. Hence, to allow work stealing, a fixed size migration window allows visibility and access to the end of each run queue. The fixed size of the window allows the system to leverage wait free algorithms that provide freedom from starvation and bounded wait times, improving scalability over locks.
7. PERSISTENCE OF GOOD IDEAS
Go can trace many of it’s core concepts back to ideas presented in Hoare’s CSP paper[10], proving that a really good idea can stand the test of time. In addition to the direct lineage, aspects of additional research can be seen reflected in Go. Portions of the Emerald language[1] resurfaced in Go, though the creators of Go were not familiar with Emerald at the time[5]. It appears, in this case, that two separate groups of researchers happened to come up with the same great idea in isolation from each other. Though, given that Emerald had been around for quite some time prior to the creation of Go, it is possible that the ideas had an indirect influence on Go’s creators. Either way, the fact that the same idea appeared in different languages separated by decades, and on extremely different technology bases, shows just how powerful a really good idea can be.
Developed in the early 1980’s, Emerald lists among its goals as they relate to types: “A type system that was used for classification by behavior rather than implementation, or naming.”[1]
Consequently, Emerald supported both parametric as well as inclusion polymorphism, as defined by Cardelli and Wegner in [2]:
inclusion polymorphism
- An object can be viewed as belonging to many different types that need not be disjoint.
parametric polymorphism
- A function has an implicit or explicit type parameter which determines the type of the argument for each application of the function.
This is similar to the concept of a type implementing an interface in Go merely by defining the methods included in the interface rather than declaring this a priori as in Java or C++. The resemblance between the implementations of this concept in the two languages is uncanny.
We have already explored the influence that CSP has had, not only on Go, but on the entire lineage of similar programming languages developed by Rob Pike and his colleagues at Bell Labs[4],[8]. It bears repeating that the use of Hoare’s CSP primitives, in essentially unchanged form several decades after the ideas were initially presented, is a real testament to their strength and continued applicability. Even more astounding is that these ideas were originally presented when the hardware to support such processes was still largely theoretical.
The Go language has been greatly influenced by previous work in Computer Science. Hence, we believe that when looking to improve parts of the language, such as the runtime scheduler, many great ideas can still be found by examining past research and applying those techniques to current work. Our additions to the changes proposed by Dmitry Vyukov center around this thought.
8. OUR PROPOSAL
Dmitry Vyukov’s proposed updates[13] to the Go runtime stand to introduce significant performance improvements to the current scheduler. We think that there is still room for improvement, though, specifically with regards to reducing contention between G’s. In our initial assessment of the runtime we identified several possible improvements, however, upon discovering Dmitry Vyokov’s design document we realized that many of our ideas, as well as some additional improvements, were already being implemented. Upon reviewing the proposed changes as well as doing some additional research we determined that we can apply several techniques that are found in the literature to introduce additional performance gains. These include contention aware scheduling as discussed in section 6.2 in conjunction with the approach implemented by the Occam π runtime as described in section 6.3.
The proposed changes to the Go runtime actually set the stage quite well for the inclusion of contention aware scheduling. The concept of processors, or P’s, allows us to design an algorithm for intelligently grouping G’s to run on specific P’s. We decided that the contention aware scheduling algorithm that takes locks into consideration, as described in section 6.2.2, is a better model for us to emulate than trying to implement a solution similar to the one discussed in section 6.2.1. Although the P structs (previously M structs) contain a cache, there is no straightforward way of measuring cache contention, and the issue is even further complicated by the new work-stealing algorithm, which could potentially introduce additional overhead to our analysis. This may be an area for future research, as it will be significantly more viable once the proposed changes are implemented and experimentation can be conducted to determine an effective cache contention measurement.
We can leverage an alternate contention aware scheduling technique by taking synchronization into account. Channels in Go work similarly to locks in other languages, in that they facilitate communication between concurrently executing code while also providing a means of synchronization. Reading from or writing to a channel is usually a blocking operation, since channels in Go are not buffered by default. Goroutines that communicate with each other on the same channel may not be able to run in parallel without excessive blocking due to, hence we can run such groups of goroutines serially on the same processor to reduce the overhead of blocking. This may also improve cache locality as related goroutines may be more likely to access the same memory locations. Therefore, we believe that the techniques proposed by Xian et al[7] are applicable to the Go runtime.
Goroutines have to call into the runtime to interact with channels, in part because depending on the state of the channel these interactions could have scheduling implications. Therefore, it would be relatively straightforward to record these requests from goroutines and maintain a mapping in the runtime between goroutines and the channels they have used for communication.

Goroutines which communicate on the same channels should then be grouped together and run on the same processor. If necessary, the groups could evolve over time based on changes to their communication patterns. Once groups are established, contention aware scheduling could be integrated with the work-stealing algorithm. When a P picks a processor to steal G’s from, it would need to ensure that it is stealing whole groups of related G’s, much like the batches of related processes as discussed in section 6.3.
The modifications to the runtime that have been suggested above are extremely similar to the implementation of the Occam π[3] scheduler as discussed in section 6.3. We deal with essentially the same concerns, namely, trying to group related goroutines into clusters, mapping clusters to physical processors and scheduling each cluster serially on its assigned processor.
A big difference between the Occam π runtime and a solution for the Go scheduler is the mapping of P’s to physical processors. In Occam π the mapping of physical processors to logical processors is known, and definite. However, as was discussed in section 5, that is not the case in Go. Therefore, maintaining high G to P affinity is not completely sufficient as we have no way to ensure that the G’s are actually running on the processors that we intended. Our plan to mitigate this is to ensure a high M to P affinity by attaching a pool of M’s to each P. Furthermore, we need to pin the kernel level threads that these M’s represent to the respective physical processors that are represented by the P’s. For each processor up to GOMAXPROCS we can create an M pool where each M in the pool is bound to the same processor. Scheduling a group of G’s across this pool of M’s will ensure that the G’s are running on the same physical processor. A key difference between this implementation and Vyukov’s proposal[13] is that M’s can no longer be attached to different P’s.
Due to the introduction of M pools, each M must now ensure that there is at least one spinning M in its pool, before it can block. If this condition is not met, it must spawn a new M and add it to the pool. If an M is spinning and it observes that all batches of G’s attached to its P are blocked, then it must notify its P to initiate the work stealing algorithm. As discussed earlier, our proposed changes are based on the implementation of the Occam π[3] runtime, and the similarity can be seen in figure 7. An important difference is the addition of the pool of M’s assigned to a P. Since we plan to leverage the wait free algorithms proposed by Ritson et al[3]. for drawing related G’s into batches and for work stealing, we have modified the structure of a P to conform to that of the logical processor in section 6.3.
There are several obvious gains to this approach. The main benefit is that we now have good affinity between G’s and P’s, and between M’s and P’s. The pinning of the M’s to the physical processors ensures that we get good cache performance, since we now have a good affinity between G’s and physical processors. The downside of this approach is that we are now much more susceptible to the operating system scheduling decisions because the Go runtime is probably not the only process running, and M’s are no longer portable across processors. Some processors may be heavily loaded with computationally intensive tasks (external to the Go program), which will cause the M’s pinned to those processors to run much slower. However, if some processors are heavily loaded, the lightly loaded processors will steal groups of G’s and should mitigate the adverse effects of unfavorable scheduling decisions made by the operating system.
One scenario in which the work stealing algorithm may not be able to correct processor imbalance is when GOMAXPROCS is less than the number of physical processors, and we are unlucky enough that the M’s the runtime has provisioned are pinned to the more heavily loaded processors. Another edge case in which our scheduling algorithm will perform poorly is when we are given many G’s that are locked to certain M’s by the user. This will cause both the clustering and the work stealing algorithms to break down. One way of mitigating this may be to switch to the old scheduler when the number of locked goroutines exceeds a given threshold which can be determined experimentally.
In summary, our major addition to enhance the scheduler is the inclusion of contention aware scheduling. This is accomplished by leveraging the batching algorithm from the Occam π implementation[3], and the pinning of M’s to physical processors. We achieve the grouping of G’s into contention aware batches by tracking communications through channels, and then schedule G’s that communicate with each other serially on the same processor. Threads are pinned to processors, and the M’s representing these threads are grouped into processor-specific M pools. This solidifies the association between P’s and physical processors. By scheduling G’s accross the M pools, we increase the affinity of G’s to physical processors. Our model for many of these improvements is Occam π, as the implementations are extremely similar.
9. CONCLUSION
In this paper we explored the Go runtime, specifically focusing on the scheduling module. We presented a brief history and overview of Go’s scheduler, and highlighted some potential areas for improvement. Some of these areas have been addressed by Dmitry Vyukov, who is in the process of updating the runtime. Based on these proposed changes, as well as a brief examination of several systems that relate to the Go scheduler, we have identified parts of his proposal which we believe can be further improved. These improvements require relatively minor changes to the runtime, and we expect that they will result in significant performance gains. In the last section we outlined our suggestions for extending the Go scheduler, and analyzed some of the implications this would have on the current system including its pending improvements.
Go’s model of computation is very powerful, and much of this power comes from the implementation of the runtime, including the scheduling module. Improvements in this area can further the development of Go, thereby increasing its staying power. It takes time for a language to evolve, and even the languages that have been popular for decades are still improving. We hope that the ideas expressed in this paper will be a small step in helping Go become a popular, Go-to language.
10. REFERENCES
[1] Eric Jul Andrew P. Black, Norman C. Hutchinson and Henry M. Levy.
The development of the emerald programming language.
In SIGPLAN conference on History of programming languages, pages 11–1–11–51.
ACM, June 2007.
[2] Luca Cardelli and Peter Wegner.
On understanding types, data abstraction, and polymorphism.
Computing Surveys, 17(4):471–522, December 1985.
[3] Adam T. Sampson Carl G. Ritson and Frederick R. M. Barnes.
Multicore scheduling for lightweight communicating processes.
Lecture Notes in Computer Science, 5521:163–183, 2009.
[4] Russ Cox. Bell labs and csp threads.
http://swtch.com/ rsc/thread/.
[5] Russ Cox. Go data structures: Interfaces.
http://research.swtch.com/interfaces.
[6] Dmitry Vyukov et al.
Scalable go scheduler design doc discussion forum.
https://groups.google.com/forum/#!msg/golangdev/ H9nXe7jG2U/QEjSCEVB3SMJ.
[7] Witawas Srisa-an Feng Xian and Hong Jiang.
Contention-aware scheduler: unlocking execution parallelism in multithreaded java programs.
In SIGPLAN conference on Object-oriented programming systems languages and applications, pages 163–180.
ACM, 2008.
[8] Google. Go documentation.
http://www.golang.org.
[9] Google. Go source code.
http://code.google.com/p/downloads/list.
[10] C.A.R. Hoare.
Communicating sequential processes.
Communications of the ACM, 21(8):666–677,
August 1978.
[11] John Ousterhout.
Scheduling techniques for concurrent systems. In 3rd International Conference on Distributed Computing Systems, pages 22–30.
IEEE, 1982.
[12] Sergey Zhuravlev Sergey Blagodurov and Alexandra Fedorova.
Contention-aware scheduling on multicore systems.
ACM Transactions on Computer Systems, 28(4),
December 2010.
[13] Dmitry Vyukov. Scalable go scheduler design doc.
https://docs.google.com/document/d/1TTj4T2JO
42uD5ID9e89oa0sLKhJYD0Y kqxDv3I3XMw/edit.