【LINUX驱动开发】AMG8833红外成像模块在HI3516上的应用
文章目录
- AMG8833介绍
-
- 内部框图
- 器件参数
- 点阵的排布顺序
- 原理图
- 内部寄存器
-
- 1、Power Control寄存器:
- 2、Reset寄存器:
- 4、Interrupt Control寄存器:
- 5、Status寄存器:
- 6、Status Clear寄存器:
- 7、Average寄存器:
- 8、Interrupt Level寄存器:
- 9、Thermistor寄存器:
- 10、Interrupt Table寄存器:
- 11、Temperature寄存器:
- HI3516驱动开发
- 测试代码
- 最终效果
AMG8833介绍
内部框图
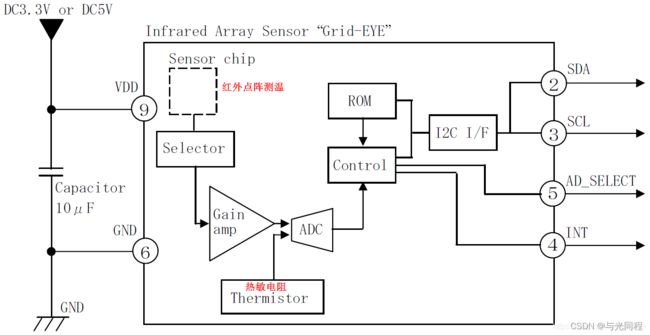 可以看到AMG8833的内部有红外点阵测温,并且还带有一个热敏电阻。使用同一个ADC进行采样,然后送给Control。
可以看到AMG8833的内部有红外点阵测温,并且还带有一个热敏电阻。使用同一个ADC进行采样,然后送给Control。
器件参数
测温点数:64(8x8的矩阵)
帧率:10帧每秒或1帧每秒
红外测温分辨率:0.25℃
热敏电阻测量温度范围:-20℃~80℃
热敏电阻分辨率:0.0625℃
红外测温的准确度:High gain误差在2.5℃以内;Low gain误差在3℃以内。
点阵的排布顺序
从右到左、从下到上。因此右下角才是第一个点。

原理图
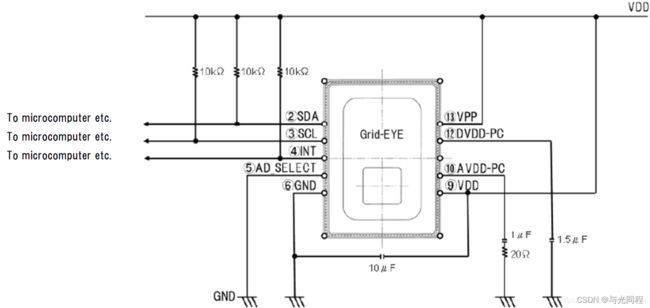 2脚和3脚是IIC通信引脚,最大速度400K。
2脚和3脚是IIC通信引脚,最大速度400K。
4脚是中断引脚,如果INT control寄存器中激活了中断功能,当发生中断,此引脚会拉低。
5脚是IIC设备地址选择脚。拉低,设备地址为110 1000,即0x68。拉高,设备地址为110 1001,即0x69。
设备地址占据高7位,最低位是读写位,0表示写,1表示读。所以当5脚拉低,进行写操作时,8位数据为:1101 0000,即0xD0,读操作时,8位数据为:1101 0001,即0xD1。
6脚为地。
9脚和13脚为VDD,可以3.3V或5V供电。
10脚接一个电容和电阻。
12脚接一个电容。
内部寄存器
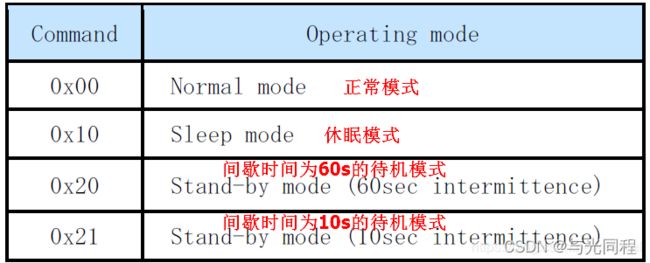
1、Power Control寄存器:
设置AMG8833的工作模式
2、Reset寄存器:
进行软复位。

有两种复位方式:

Flag Reset会清除Status寄存器(0x04)、中断标志、中断表(0x10~0x17)
Initial Reset会复位标志,并使AMG8833的参数恢复初始。
3、Frame Rate寄存器:设定帧率

bit0: Setting Frame Mode
1: 1FPS
0: 10FPS
4、Interrupt Control寄存器:
配置中断功能

bit1: INTMOD
1: Absolute Value Interrupt Mode
0: Difference Interrupt Mode
bit0: INTEN
1: INT 引脚输出使能
0: INT 引脚禁止输出(保持高阻状态)
5、Status寄存器:
溢出标志和中断标志

bit3: OVF_THS
1: 热敏电阻温度输出溢出标志
(Value of Thermistor (0x0E、0x0F) : 0xFFF)
bit2: OVF_IRS
1: 红外温度输出溢出标志
(Value of Temperature Register(0x80~0xFF): 0xFFF)
bit1: INTF
1: 发生中断标志
(Value of Interrupt Table Register(0x10~0x17): Except for 0x00)
6、Status Clear寄存器:
清除溢出标志和中断标志
bit3: OVT_CLR
1: 清除热敏电阻温度输出溢出标志
bit2: OVS_CLR
1: 清除红外温度输出溢出标志
bit1: INTCLR
1: 清除中断标志
7、Average寄存器:
设置移动平均输出模式
bit5: MAMOD
1::Twice moving average Output Mode
0:No moving average
8、Interrupt Level寄存器:
设置发生中断的上限值、下限值、迟滞值。
INT_LVL_H [11:0]:中断上限值,当温度高于此值,输出中断并且设置Interrupt Table寄存器。
INT_LVL_L [11:0]:中断下限值,当温度低于此值,输出中断并且设置Interrupt Table寄存器。
INT_HYS [11:0]:设置上限值、下限值的迟滞值,类似于施密特触发器。
上述3个数据都是12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.25℃。
9、Thermistor寄存器:
热敏电阻测量的温度值
有12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.0625℃。举例如下:
10、Interrupt Table寄存器:
显示哪一个像素点发生了中断
当64个像素点中的某一个点的温度值高于或低于了Interrupt Level寄存器中设置的上下限,就会在Interrupt Table寄存器的对应位设置值。值为1代表发生了中断,0表示没有。
11、Temperature寄存器:
红外点阵测量的温度值
有12位数据。最高位为符号位,值为0表示正,值为1表示负。步进值为0.25℃。举例如下:
0x80和0x81保存的是第一个像素的温度值,1-64像素对应地址为0x80~0xFF。
注:
(1)1 - 64像素(0x80~0xFF)的温度值是一起更新的,不需要任何指令。
(2)0x80~0xFF的数据是一次读出的,所以不用担心新的温度值和旧的温度值会混在一起。
HI3516驱动开发
为了避免麻烦,并且这里的传输数据量并不是非常大,所以直接用IO读取数据
所以如果要用其他LINUX开发板底层函数必须根据你们的板子重新编写。
/*
* @Description:
* @Autor: YURI
* @Date: 2022-01-21 17:14:06
* @LastEditors: YURI
* @LastEditTime: 2022-01-31 00:03:07
*/
#ifndef amg8833_H
#define amg8833_H
#define GPIO0_BASE_ADDR 0x120D0000
#define GPIO0_DIR_ADDR ((GPIO0_BASE_ADDR) + (0x400))
#define GPIO0_DATA_OUT_ADDR ((GPIO0_BASE_ADDR) + (0x000))
#define GPIO0_DATA ((GPIO0_BASE_ADDR) + (0x3FC))
#define GPIO1_BASE_ADDR 0x120D1000
#define GPIO1_DIR_ADDR ((GPIO1_BASE_ADDR) + (0x400))
#define GPIO1_DATA_OUT_ADDR ((GPIO1_BASE_ADDR) + (0x000))
#define GPIO1_DATA ((GPIO1_BASE_ADDR) + (0x3FC))
#define GPIO2_BASE_ADDR 0x120D2000
#define GPIO2_DIR_ADDR ((GPIO2_BASE_ADDR) + (0x400))
#define GPIO2_DATA_OUT_ADDR ((GPIO2_BASE_ADDR) + (0x000))
#define GPIO2_DATA ((GPIO2_BASE_ADDR) + (0x3FC))
#define GPIO3_BASE_ADDR 0x120D3000
#define GPIO3_DIR_ADDR ((GPIO3_BASE_ADDR) + (0x400))
#define GPIO3_DATA_OUT_ADDR ((GPIO3_BASE_ADDR) + (0x000))
#define GPIO3_DATA ((GPIO3_BASE_ADDR) + (0x3FC))
#define GPIO4_BASE_ADDR 0x120D4000
#define GPIO4_DIR_ADDR ((GPIO4_BASE_ADDR) + (0x400))
#define GPIO4_DATA_OUT_ADDR ((GPIO4_BASE_ADDR) + (0x000))
#define GPIO4_DATA ((GPIO4_BASE_ADDR) + (0x3FC))
#define GPIO5_BASE_ADDR 0x120D5000
#define GPIO5_DIR_ADDR ((GPIO5_BASE_ADDR) + (0x400))
#define GPIO5_DATA_OUT_ADDR ((GPIO5_BASE_ADDR) + (0x000))
#define GPIO5_DATA ((GPIO5_BASE_ADDR) + (0x3FC))
#define GPIO6_BASE_ADDR 0x120D6000
#define GPIO6_DIR_ADDR ((GPIO6_BASE_ADDR) + (0x400))
#define GPIO6_DATA_OUT_ADDR ((GPIO6_BASE_ADDR) + (0x000))
#define GPIO6_DATA ((GPIO6_BASE_ADDR) + (0x3FC))
#define GPIO7_BASE_ADDR 0x120D7000
#define GPIO7_DIR_ADDR ((GPIO7_BASE_ADDR) + (0x400))
#define GPIO7_DATA_OUT_ADDR ((GPIO7_BASE_ADDR) + (0x000))
#define GPIO7_DATA ((GPIO7_BASE_ADDR) + (0x3FC))
#define GPIO8_BASE_ADDR 0x120D8000
#define GPIO8_DIR_ADDR ((GPIO8_BASE_ADDR) + (0x400))
#define GPIO8_DATA_OUT_ADDR ((GPIO8_BASE_ADDR) + (0x000))
#define GPIO8_DATA ((GPIO8_BASE_ADDR) + (0x3FC))
#define GPIO9_BASE_ADDR 0x120D9000
#define GPIO9_DATA_OUT_ADDR ((GPIO9_BASE_ADDR) + (0x000))
#define GPIO9_SET_DATA_ADDR ((GPIO9_DATA_OUT_ADDR) + (0x200))
#define GPIO9_DATA ((GPIO9_BASE_ADDR) + (0x3FC))
#define GPIO10_BASE_ADDR 0x120DA000
#define GPIO10_DIR_ADDR ((GPIO10_BASE_ADDR) + (0x400))
#define GPIO10_DATA_OUT_ADDR ((GPIO10_BASE_ADDR) + (0x000))
#define GPIO10_DATA ((GPIO10_BASE_ADDR) + (0x3FC))
#define GPIO11_BASE_ADDR 0x120DB000
#define GPIO11_DIR_ADDR ((GPIO11_BASE_ADDR) + (0x400))
#define GPIO11_DATA_OUT_ADDR ((GPIO11_BASE_ADDR) + (0x000))
#define GPIO11_DATA ((GPIO11_BASE_ADDR) + (0x3FC))
enum amg8833_pin_direction{amg8833_IN=0,amg8833_OUT=1};
#define AMG8833_DELAY_TIME 4
//amg8833 关键控制器
typedef struct
{
volatile unsigned long *pin_mutx; //管脚选择地址
volatile unsigned long *pin_dir; //管脚方向地址
volatile unsigned long *pin_data;//控制管脚的数据组在的位置
volatile int pin_index; //管脚号
}amg8833_pin;
//amg8833 硬件控制器
typedef struct
{
amg8833_pin *sck; // 时钟
amg8833_pin *sda; // 数据线
amg8833_pin *inter; // 中断线
amg8833_pin *ad0; // 地址选择
}amg8833_ctl;
#define AMG88xx_PIXEL_TEMP_CONVERSION 0.25
#define AMG88xx_THERMISTOR_CONVERSION 0.0625
enum
{
AMG88xx_PCTL = 0x00,
AMG88xx_RST = 0x01,
AMG88xx_FPSC = 0x02,
AMG88xx_INTC = 0x03,
AMG88xx_STAT = 0x04,
AMG88xx_SCLR = 0x05,
//0x06 reserved
AMG88xx_AVE = 0x07,
AMG88xx_INTHL = 0x08,
AMG88xx_INTHH = 0x09,
AMG88xx_INTLL = 0x0A,
AMG88xx_INTLH = 0x0B,
AMG88xx_IHYSL = 0x0C,
AMG88xx_IHYSH = 0x0D,
AMG88xx_TTHL = 0x0E,
AMG88xx_TTHH = 0x0F,
AMG88xx_INT_OFFSET = 0x010,
AMG88xx_PIXEL_OFFSET = 0x80
};
enum power_modes{
AMG88xx_NORMAL_MODE = 0x00,
AMG88xx_SLEEP_MODE = 0x01,
AMG88xx_STAND_BY_60 = 0x20,
AMG88xx_STAND_BY_10 = 0x21
};
enum sw_resets {
AMG88xx_FLAG_RESET = 0x30,
AMG88xx_INITIAL_RESET = 0x3F
};
enum frame_rates {
AMG88xx_FPS_10 = 0x00,
AMG88xx_FPS_1 = 0x01
};
enum int_enables{
AMG88xx_INT_DISABLED = 0x00,
AMG88xx_INT_ENABLED = 0x01
};
enum int_modes {
AMG88xx_DIFFERENCE = 0x00,
AMG88xx_ABSOLUTE_VALUE = 0x01
};
#define AMG88xx_ADR 0xD0 //5脚拉低时的设备地址
#endif
/*
* @Description:
* @Autor: YURI
* @Date: 2022-01-30 17:18:51
* @LastEditors: YURI
* @LastEditTime: 2022-01-31 00:33:38
*/
#include 测试代码
/*
* @Description:
* @Autor: YURI
* @Date: 2022-01-30 18:34:31
* @LastEditors: YURI
* @LastEditTime: 2022-01-31 02:35:01
*/
#include 这里我偷懒了没有自己写插值算法,而是直接使用的OpenCV的插值函数,所以如果要用,还需要移植OpenCV。
具体代码参考
[email protected]:Yueyang123/arm_media.git
最终效果
今天是除夕夜,大家过年好。