1、手把手撸一份驱动 到 点亮 Camera
2、Camera dtsi 完全解析
3、Camera驱动源码全解析上
4、Camera驱动源码全解析下
一、说在前头的话
1.上个月通过博客认识了Eric,以前在oppo工作的,正好他是我现在同事兼老乡-老吴的好朋友,
于是就一起聚餐了,看着他们照顾小孩,听他们讲中年危机,未来我也会跟他们相似。
最大感触就是 选择很重要,Eric 2012~2013年在OPPO就职,后面选择离开。
如果当年一直在的话,现在指不定就财富自由了,只道人生如戏,这就是命!2.最近家里发生了事情,正好赶上公司旅游,旅游的时间要周六补班补回来,但是有件小事让我耿耿于怀。
人生苦短,及时行乐。3.最近事情多,家里的,工作上的,让我焦虑、急躁,我也不知道我能干几年,呆几年。
改一改年轻人的毛病,不急不躁,走一步算一步。很久没写博客了,继续坚持积累与分享!
二、知识点
1.如何自己写一份Camera驱动
以前刚入行时,总希望自己手写一份驱动,毕竟自己驱动工程师嘛,
搬砖一段时间了,现在正好搞新平台,高通官网也下不到驱动代码,我们的模组厂也没有代码,所以只能自己写一份了。
主要分享思路吧。
1.1 对比新老平台
旧平台
vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/sensor_libs/s5k4h7/
Android.mk
s5k4h7_lib.c高端平台
vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/sensor/libs/s5k2l7/
Android.mk
s5k2l7_lib.c
s5k2l7_lib.h
s5k2l7_pdaf.h
由于高端平台没有s5k4h7,我们随便找一份平台本身存在的且类似的,如s5k2l7。
变化:
对比发现,
1.架构变了:
旧平台所有的东西都写在c文件中。
高端平台拆分了c文件和h头文件,并且多了一个pdaf。
2.函数实现:
旧平台
1.static uint32_t s5k4h7_real_to_register_gain(float real_gain)
2.static float s5k4h7_register_to_real_gain(uint32_t reg_gain)
3.static uint32_t s5k4h7_digital_gain_calc(float real_gain, float sensor_real_gain)
4.int32_t s5k4h7_calculate_exposure(float real_gain, uint32_t line_count,
sensor_exposure_info_t *exp_info)
5.static int32_t s5k4h7_fill_exposure_array(uint16_t gain, uint32_t line,
uint32_t fl_lines,
int32_t luma_avg,
uint32_t fgain,
struct msm_camera_i2c_reg_setting* reg_setting)
6.void *s5k4h7_open_lib(void)
高端平台
1.static unsigned int s5k2l7_real_to_register_gain(float real_gain)
2.static float s5k2l7_register_to_real_gain(unsigned int reg_gain)
3.static unsigned int s5k2l7_digital_gain_calc(float real_gain, float sensor_real_gain)
4.int32_t sensor_calculate_exposure(float real_gain,
uint32_t line_count, sensor_exposure_info_t *exp_info,
__attribute__((unused)) float s_real_gain)
5.int32_t sensor_fill_exposure_array(uint32_t gain,
uint32_t digital_gain, uint32_t line,
uint32_t fl_lines, __attribute__((unused)) int32_t luma_avg,
__attribute__((unused)) uint32_t hdr_param,
struct camera_i2c_reg_setting* reg_setting,
__attribute__((unused)) unsigned int s_gain,
__attribute__((unused)) int s_linecount,
__attribute__((unused)) int is_hdr_enabled)
6.void *sensor_open_lib(void)
所以,其实就是框架变了,该实现的函数还是不变,我们把s5k2l7全部改成s5k4h7
,把旧平台的实现直接搬过来即可,需要注意的一点就是函数参数,
例如: attribute((unused)) int is_hdr_enabled,这些按照新平台写即可,否则编译会报错。
3.参数配置
旧平台:

高端平台:
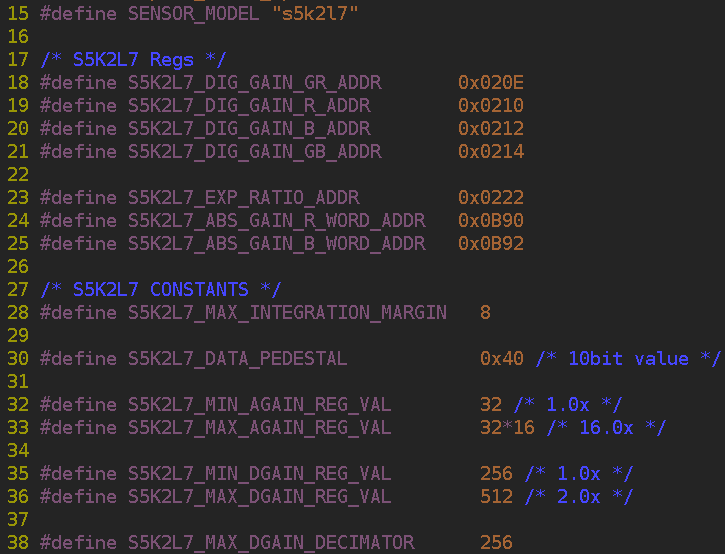
这上面只是部分截图,作为例子,参数配置还报错res、sensor_slave_info、out_info等等。
这时候,用Beyondcompare软件作对比,然后按照新版框架,把8909的配置移到sdm429即可。
当然,会遇到一些新的配置,是之前没有的,例如:
如果暂时不知道是什么,就先保留原先的即可。
需要注意的地方
老平台
/* Res 0 */
{
.x_output = 3264,
.y_output = 2448,
.line_length_pclk = 3688,
.frame_length_lines = 2530,
.vt_pixel_clk = 280000000,
.op_pixel_clk = 280000000,
.binning_factor = 1,
.min_fps = 7.50,
.max_fps = 30.0,
.mode = SENSOR_DEFAULT_MODE,
},
高端平台
/* Res 0 */
{
.x_output = 4640,
.y_output = 3488,
.line_length_pclk = 5088,
.frame_length_lines = 3668,
.op_pixel_clk = 585600000,
.binning_factor = 1,
.binning_method = 0,
.min_fps = 7.5,
.max_fps = 30.0,
.mode = SENSOR_DEFAULT_MODE,
.offset_x = 0,
.offset_y = 0,
.scale_factor = 1.000,
.is_pdaf_supported = 0,
.data_rate = 1500000000ULL * 4,
},
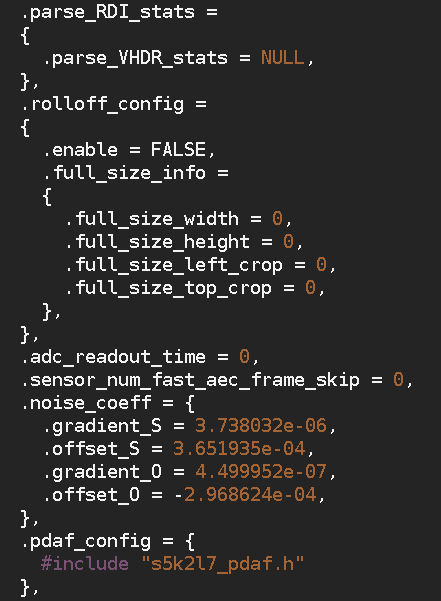
对比发现:新平台没了vt_pixel_clk ,取而代之的是data_rate,并且多了is_pdaf_supported ,
is_pdaf_supported 表面是否支持pdaf,跟af相关的,前期点亮时可以先设置成0。
注意1:data_rate这个一定要配置,不然会造成摄像头无法点亮,预览黑屏。
注意2:如果预览偏红或者其他颜色, 修改filter_arrangement的值
支持的值
.filter_arrangement = SENSOR_RGGB,
.filter_arrangement = SENSOR_GRBG,
.filter_arrangement = SENSOR_GBRG,
.filter_arrangement = SENSOR_BGGR,
.filter_arrangement = SENSOR_RGGB,
.sensor_output =
{
.output_format = SENSOR_BAYER,
.connection_mode = SENSOR_MIPI_CSI,
.raw_output = SENSOR_10_BIT_DIRECT,
.filter_arrangement = SENSOR_GRBG,
#ifndef FLIP_MIRROR
.filter_arrangement = SENSOR_GRBG,
#else
.filter_arrangement = SENSOR_BGGR,
#endif
},
到此 驱动就算写完了。
2.高端平台摄像头的点亮
想一想旧平台点亮一颗摄像头需要改动到哪些地方。
1.配置device-vendor.mk-编译需要的so库和效果文件
2.在sensor_init.c添加支持的sensor
#define BOARD_SENSORS
"s5k4h7",
"ov5675",
3.添加相应的驱动文件和效果文件。
4.kernel下配置dtsi文件
我们就按照这个思路,去尝试修改高端平台。
2.1 device-vendor.mk修改
vendor/qcom/proprietary/common/config/device-vendor.mk
MM_CAMERA += libmmcamera_s5k4h7
为了快速点亮,我没有自己加效果文件,而是直接引用存在的效果文件。
后续添加效果文件还要加入改动:

2.2 在xml添加支持的sensor
vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/configs/msm8937_camera.xml
···省略
1
s5k4h7
gc8034_chromatix
1
FRONT
270
1
0x1f
0x4320
0
3.83
2.0
1.97
63.2
49.0
0.1
需要注意的点:
1.CameraConfigurationRoot里面最大只能配置22个CameraModuleConfig,超过后直接报错。
2.配置解析:
*1 表示前摄
*s5k4h7 表示支持的sensor
*dw9714_s5k4h7 先注释
*s5k4h7_otp 先注释
*gc8034_chromatix
效果文件,偷懒,先用存在的,后面还是得自己添加一份s5k4h7_chromatix
*1 设置1即可
*FRONT 前摄设置FRONT
*270 旋转角度 配错好像也没关系
4lane配置
1
0x1f
0x4320
0
2lane配置
1
0x13
0x4320
0
3.83
2.0
1.97
63.2
49.0
0.1
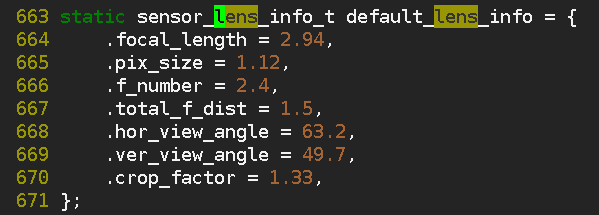
LensInfo就是镜头信息,配错了也不影响点亮,可以找模组厂拿,也可以从以前的驱动文件中移植过来。
2.3 添加相应的驱动文件和效果文件
vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/sensor/libs/
s5k4h7文件夹
1. Android.mk
2. s5k4h7_lib.c
3. s5k4h7_lib.h
4. s5k4h7_pdaf.h
为了快速点亮,如果按照的是懒人方法,
xml效果文件配置的是已存在的gc8034_chromatix,那就按不用添加效果文件了。
如果配置了s5k4h7_chromatix,那就得添加如下文件:

2.4 kernel下dtsi的修改
kernel/msm-4.9/arch/arm64/boot/dts/qcom/sdm429w-camera-sensor-spyro.dtsi
qcom,camera@1 {
cell-index = <1>;
compatible = "qcom,camera";
reg = <0x1>;
qcom,csiphy-sd-index = <1>;
qcom,csid-sd-index = <1>;
qcom,mount-angle = <270>;
cam_vdig-supply = <&pm660_l3>;
cam_vio-supply = <&pm660_l14>;
cam_vaf-supply = <&pm660_l19>;
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana",
"cam_vaf";
qcom,cam-vreg-min-voltage = <1200000 1800000 2800000 2850000>;
qcom,cam-vreg-max-voltage = <1200000 1800000 2800000 3200000>;
qcom,cam-vreg-op-mode = <200000 0 80000 100000>;
pinctrl-names = "cam_default", "cam_suspend";
pinctrl-0 = <&cam_sensor_mclk1_default
&cam_sensor_front_default>;
pinctrl-1 = <&cam_sensor_mclk1_sleep
&cam_sensor_front_sleep>;
gpios = <&tlmm 27 0>,
<&tlmm 33 0>,
<&tlmm 66 0>,
<&tlmm 38 0>;
qcom,gpio-vana= <1>;
qcom,gpio-vdig= <2>;
qcom,gpio-reset = <3>;
qcom,gpio-req-tbl-num = <0 1 2 3>;
qcom,gpio-req-tbl-flags = <1 0 0 0>;
qcom,gpio-req-tbl-label = "CAMIF_MCLK1",
"CAM_AVDD1",
"CAM_DVDD1",
"CAM_RESET1";
qcom,sensor-position = <0x1>;
qcom,sensor-mode = <0>;
qcom,cci-master = <1>;
clocks = <&clock_gcc clk_mclk1_clk_src>,
<&clock_gcc clk_gcc_camss_mclk1_clk>;
clock-names = "cam_src_clk", "cam_clk";
qcom,clock-rates = <24000000 0>;
};
用到哪些供电脚,clk,gpio等等,需要跟硬件沟通,按照自身的硬件去配置。
我用的懒人办法点亮的摄像头,没添加效果文件,以下是改动截图:

ok,到此新平台就基本搞定!