OpenCV:Canny算子边缘检测
目录
1.简介
2.cv::Canny()
3.实践
1.简介
Canny边缘检测是一个多级边缘检测算法。主要步骤如下:
(1)使用高斯平滑滤波器卷积降噪。
(2)计算平滑后图像的梯度幅值与方向,可以采用不同的梯度算子。
(3)对梯度幅值应用非极大抑制,其过程是找出图像梯度中的局部极大值点,把其他非局部极大值点置0。
(4)使用双阈值检测和连接边缘。高阈值用于找到每一条线段,如果某一个像素位置的梯度幅值超过高阈值,表明找到了一条线段的起始。低阈值用于确定线段上的点,即以上一步找到的线段起始出发,在其邻域内搜寻梯度幅值大于低阈值的像素点,保留为边缘点;梯度幅值小于低阈值的像素点置为背景。
2.cv::Canny()
详情:opencv之Canny()函数
void cv::Canny (
InputArray image, 输入图像:8-bit
OutputArray edges, 输出边缘图像:单通道,8-bit,size与输入图像一致
double threshold1, (阈值1)低阈值。值越大,找到的边缘越少
double threshold2, (阈值2)高阈值。
int apertureSize=3, Sober算子大小
bool L2gradient=false 指定用于查找梯度幅度的方程式
)
L2gradient:False表示方程式为 |Gx|+|Gy|;True表示方程式为sqrt(Gx^2+Gy^2)(更加精确)。
3.实践
#include
#include
#include
using namespace cv;
using namespace std;
extern int th=200;
extern int tl=0;
static void on_track_h(int thresh1,void* usedata) {
Mat src = *((Mat*)usedata);
Mat dst=Mat::zeros(src.size(),src.type());
th = thresh1;
Canny(src, dst, tl, th);
imshow("Canny算子", dst);
}
static void on_track_l(int thresh2, void* usedata) {
Mat src = *((Mat*)usedata);
Mat dst = Mat::zeros(src.size(), src.type());
tl = thresh2;
Canny(src, dst, tl, th);
imshow("Canny算子", dst);
}
int main(int argc, char** argv) {
Mat image = imread("C:/Users/YY/Pictures/Saved Pictures/frose.jpg");
Mat out;
imshow("原图", image);
int l_h = 200,l_l=0;
int max_h = 255,max_l=255;
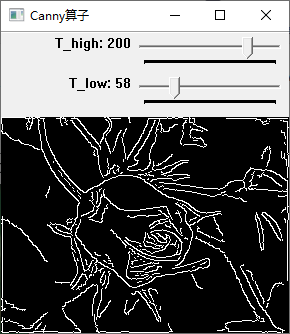
namedWindow("Canny算子", WINDOW_AUTOSIZE);
createTrackbar("T_high", "Canny算子", &l_h, max_h, on_track_h,(void*)(&image));
createTrackbar("T_low", "Canny算子", &l_l, max_l, on_track_l, (void*)(&image));
on_track_h(100, &image);
waitKey(0);
destroyAllWindows();
return 0;
}