2021年电赛F题智能送药小车(国二)开源分享
文章目录
- 题目任务
- 前言(闲话)
- 一、团队分工介绍
- 二、题目分析、破题
-
- 1.要点分析
- 2.系统方案
- 三、电控部分
-
- 1、主控拓展电路
- 2、步进电机驱动信号整合板
- PCB设计分析
- 四、视觉部分
-
- 神经网络的训练:
- 运行代码:
- 五、机械部分
- 总结
-
- 附件
题目任务
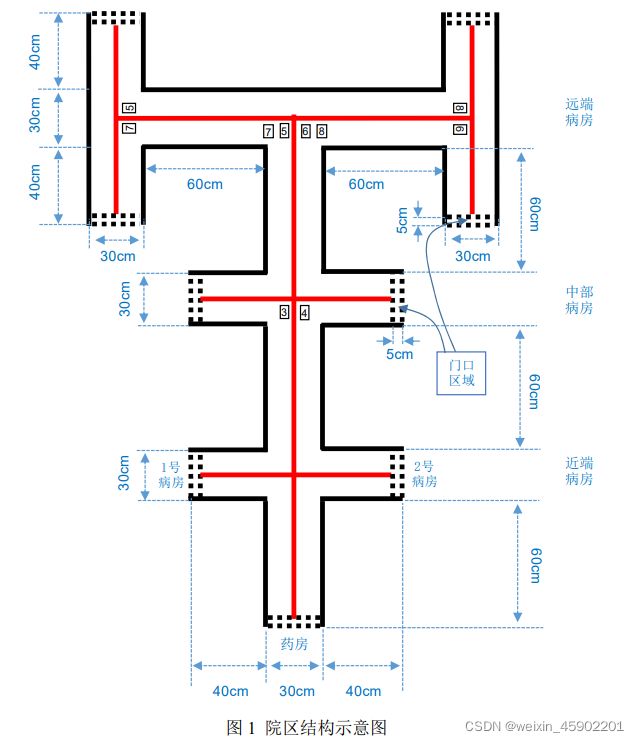
设计并制作智能送药小车,模拟完成在医院药房与病房间药品的送取作业。 院区结构示意如图1所示。院区走廊两侧的墙体由黑实线表示。走廊地面上画有 居中的红实线,并放置标识病房号的黑色数字可移动纸张。药房和近端病房号(1、2 号)如图1所示位置固定不变,中部病房和远端病房号(3-8号)测试时随机设定。
工作过程:参赛者手动将小车摆放在药房处(车头投影在门口区域内,面向 病房),手持数字标号纸张由小车识别病房号,将约 200g 药品一次性装载到送药小车上;小车检测到药品装载完成后自动开始运送;小车根据走廊上的标识信 息自动识别、寻径将药品送到指定病房(车头投影在门口区域内),点亮红色指示灯,等待卸载药品;病房处人工卸载药品后,小车自动熄灭红色指示灯,开始返回;小车自动返回到药房(车头投影在门口区域内,面向药房)后,点亮绿色指示灯。
前言(闲话)
这次比赛因为疫情延期了,给了我们更多的准备(摸鱼)时间,比赛四天三夜,占用了有课的周五(刚好碰上了实习,打铁贼累 还得熬夜。。。)
因为太过摸鱼本以为能那个省三就不错了,没想到冲了个国二,圆梦电赛了,打破了学校十年的记录。所以说竞赛这方面还得坚持,万一破纪录了呢。
我本人是负责视觉方面的,将详细写实现方法,保姆级教程,包括神经网络训练。
一、团队分工介绍
由队长赵嘉辉(电控编程)、队员陈为骞(视觉识别)和吴金颖(机械设计)组成,其中两个大四,一个大三。
//两位光电专业、一位机械的hhh
二、题目分析、破题
1.要点分析
任务可简单分为3个:
(1)巡线移动。完成最基础的移动功能,是所有功能的基础。本作品采用灰度传感器循迹和步进电机的巡线移动方案。
(2)识别病房号数字。可采用openmv、k210、树莓派等视觉单片机识别。由于没有提前准备k210,且树莓派大小、功耗较大,因此采用最常见的openmv。为保证性能足够,采用openmv4plus。
(3)双机通信。本作品采用蓝牙双机通信,实现数据共享。
完成以上3个任务后,就是对小车代码逻辑的构思和想法。后面的就是多调试代码,修bug即可。
2.系统方案
-
1、单片机选择
采用ArduinoMEGA2560单片机作主控。由于其代码开源性,代码简易,适合新手使用。强大的库函数能极大减少开发时间。且对于该题目,运算速度足够,因此采用。
-
2、运动系统
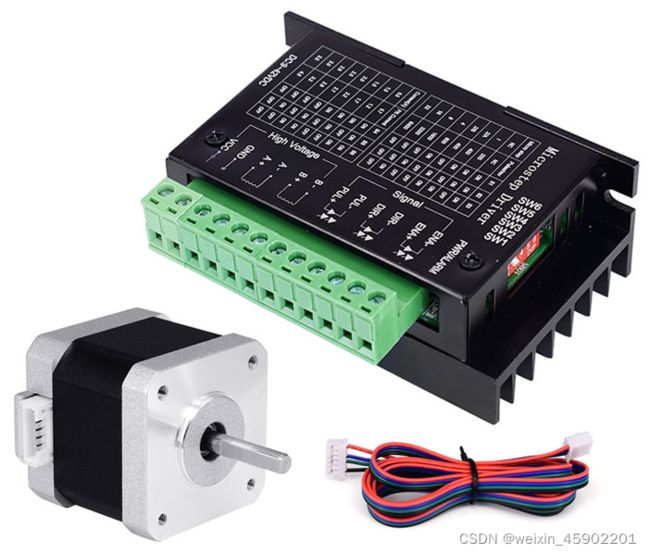
采用42步进电机。该款电机转动精确度高,扭力大,额定电流2A以下,且控制简单,不会因为不同驱动的电压而导致转动步数的偏差,无需使用闭环控制即能走出非常好的直线,不易走歪,短距离内可精准控制运动位移。驱动采用TB6600 H桥双极恒相流驱动。驱动及电机采用淘宝成品套件,设置驱动细分数为800。由于驱动体积较大,且42步进电机运行时电流较小,因此可以拆除该驱动模块的金属外壳(散热器),从而达到极大缩小体积和重量。
前轮采用牛眼轮进行支撑。牛眼轮的选择最好选摩擦力小的。本作品用的牛眼轮摩擦力较大,使得电机的速度不能提得太高,否则摩擦力会将车的运动姿态扰乱,走起来一抖一抖的。
-
3、循迹系统
采用八路灰度传感器(实际只用了4路)。调节好阈值,能精准分辨红白色。推荐使用下图的灰度传感器。用非常简单的数字逻辑检测循迹代码即能完成循迹功能。

-
4、视觉系统
手持病房号采用模板匹配识别,原因是手持病房号可动态调整远近、角度,模板匹配也能很快识别成功。
地面上的病房号数字采用OpenMV4 H7 Plus神经网络方法识别。对比模板匹配,识别成功率极高,高达90%以上。由于性能受限,运行时图像仅有2~3帧,需要在病房号前停下零点几秒让其图像稳定下来识别数字。
-
5、通信系统
采用HM-10蓝牙模块进行双机通信。主蓝牙仅能接收从蓝牙的信息,不能传信息给从蓝牙。因此从蓝牙接1号车,主蓝牙接2号车。2号车只需要接收1号车指令即可完成所有任务。注意:需提前AT指令设置主从模式和自动连接蓝牙的操作。
-
6、其他
采用了oled屏幕显示本次读取病房号是否成功,及实时显示一些小车运行状态,方便调试。设置红绿黄指示灯、蜂鸣器提示等功能。
采用双边自复位按钮作复位键。由于主控单片机和OpenMV工作电平不一致,复位引脚不能接入同一按键上,因此使用此按键可一键复位两个单片机。
药物检测采用简单的红外避障模块检测高低电平即可。
三、电控部分
电控部分已在立创开源平台发布!比赛准备的全部工程都有!点这里!!
也可以访问:https://oshwhub.com/AngleLeon/gong-ke-sai-xin-hao-zheng-ge-ban_copy
电控代码也在里面。
1、主控拓展电路
-
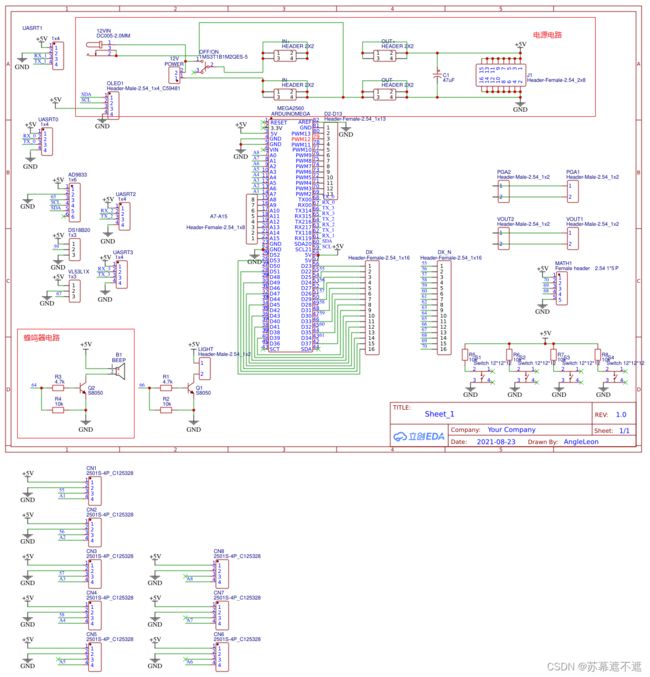
(1)单片机及其引脚外接
其中arduino的D2-D5作为IO口接入电机驱动模块,驱动两个步进电机(每个步进电机由DIR和PUL控制),D23-D37的其中一些引脚接灰度传感器的8个数字信号口。
-
(2)电源输入、输出
12V从圆孔DC5.5系列接口输入,一路直出给步进电机驱动和步进电机供电,领一路经过5V稳压模块给单片机等其他模块供电。引出8组5V电源接口,方便扩展。
-
(3)其他
其他多余的接口没有特别定义,只是单纯引出,备用。
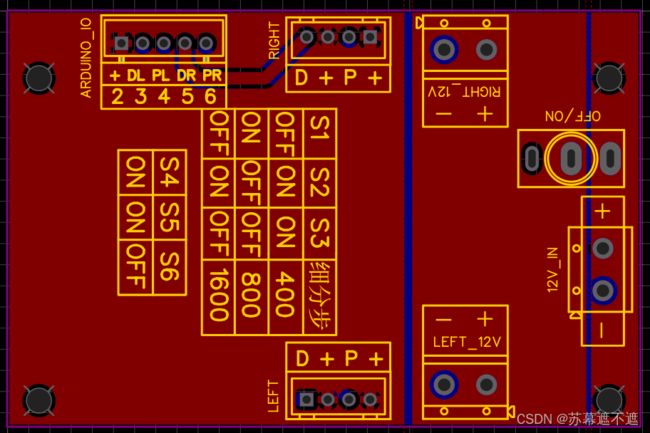
2、步进电机驱动信号整合板
两个步进电机需要两个驱动板,需要较多信号线和电源线,会导致接线较乱、易松。为了稳定性更好,制作了这块信号整合板,并使用了XH2.54红白排插线,连接不易松,且易拔插。
-
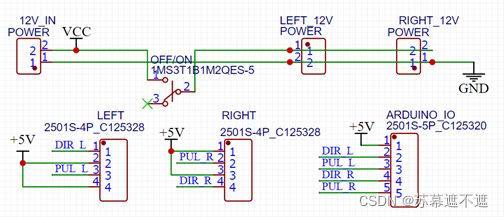
(1)原理图
分为12V电源输入输出,布线配合单片机扩展板的IO分布。
-
(2)PCB及仿真图
印丝层加入了对应的IO口数字号,标注了步进电机驱动细分数对应的拨码器状态。且该pcb孔位、大小完全适配拆了散热外壳后的步进电机驱动模块,能直接安装在驱动上,省空间。
PCB设计分析
由于主要难度在电控编程上,因此对于PCB的布线难度较小,有一定基础即可,没有需要特别注意的地方。
四、视觉部分
很多人觉得视觉难,是因为没办法搭建深度学习的训练环境,巧合的是,本人主持的大创项目正好的关于视觉神经网络的,对于懂的人识别数字十分简单,但是要在嵌入式上载入模型,对于小白来说还是有难度的。我这里只介绍一种极简方法,不需要懂神经网络内涵,手把手小白入门教学。
本人比赛使用的是OpenMv4 Plus,这是支持神经网络最低配的一款,当然K210、树莓派等都可以吊打Openmv,但是由于比赛没有准备其他两款,只能选择普普通通的Openmv了。
先上结果:

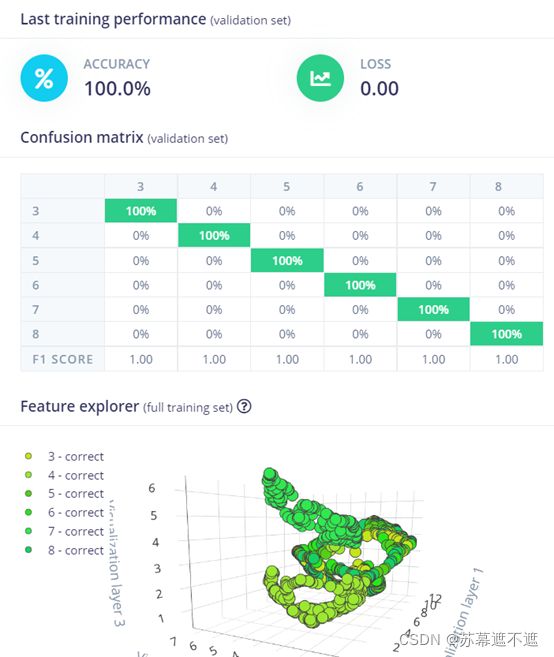
神经网络的训练:
//大神请忽略此部分~~~
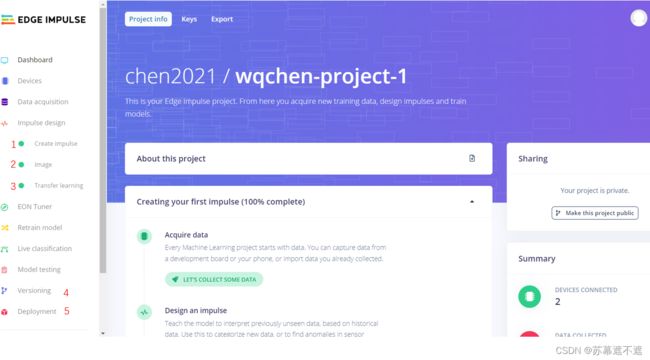
在线端训练网站:https://studio.edgeimpulse.com
-
1、使用Opemv采集数据
打开 工具-数据集编辑器-新数据集
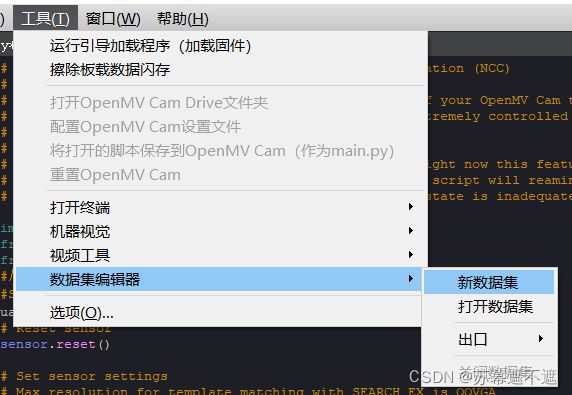
创建相应数字的文件夹
通过helloworld.py例程来采集图像,需要把画质改为QQVGA
多加sensor.set_windowing(20,76,40,40) #框选位置,左右都需要
import sensor, image, time
sensor.reset() # Reset and initialize the sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QQVGA) # Set frame size to QVGA (320x240)
sensor.set_windowing(20,76,40,40) #框选位置自己修改成合适的
sensor.skip_frames(time = 2000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
while(True):
clock.tick() # Update the FPS clock.
img = sensor.snapshot() # Take a picture and return the image.
print(clock.fps()) # Note: OpenMV Cam runs about half as fast when connected
# to the IDE. The FPS should increase once disconnected.
然后开始采集,将数字放在左右两边,两边都要采集大概几十到一百张。
-
2、在网站导入图像(Create impulse)
从openmv IDE通过API密匙上传采集到的数据集。
-
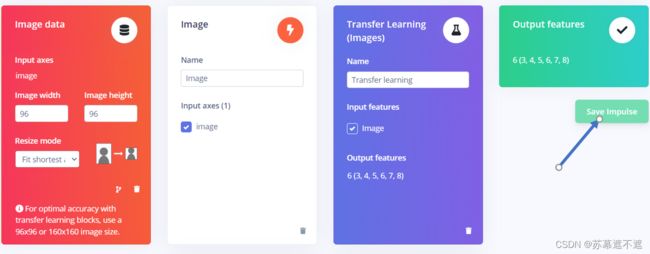
3、调整图像(Image)
按默认设置就好了。
-
4、迁移学习(Transfer learning)
参数也是按默认就行。
-
5、保存模型(Versioning)
及时做好备份,这是云端的,防止多次采集训练后效果还没以前某一次好。
-
6、导出模型
 下载神经网络后解压导入Openmv,完成。
下载神经网络后解压导入Openmv,完成。
运行代码:
下面是Openmv端运行代码,代码含模板匹配,移步星瞳官网文档,写得比我好。
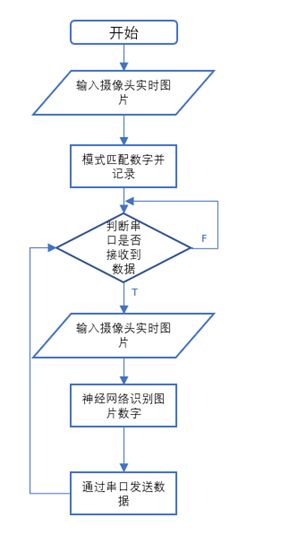
Openmv端程序框图:
主程序:
import time, sensor, image,os,tf
from image import SEARCH_EX, SEARCH_DS
from pyb import UART
#从imgae模块引入SEARCH_EX和SEARCH_DS。使用from import仅仅引入SEARCH_EX,
#SEARCH_DS两个需要的部分,而不把image模块全部引入。
uart = UART(3, 9600)
# Reset sensor
sensor.reset()
# Set sensor settings
# Max resolution for template matching with SEARCH_EX is QQVGA
sensor.set_framesize(sensor.QQVGA) #推荐QQVGA,能提高识别速度
# You can set windowing to reduce the search image.
#sensor.set_windowing(((640-80)//2, (480-60)//2, 80, 60))
sensor.set_pixformat(sensor.GRAYSCALE)
net = "trained.tflite" #导入神经网络
labels = [line.rstrip('\n') for line in open("labels.txt")] #导入模板
# Load template.
# Template should be a small (eg. 32x32 pixels) grayscale image.
template1 = ["/1.pgm"]
template2 = ["/2.pgm"]
template3 = ["/3.pgm","/3a.pgm","/3b.pgm"]
template4 = ["/4.pgm","/4a.pgm","/4b.pgm"]
template5 = ["/5.pgm","/5a.pgm","/5b.pgm"]
template6 = ["/6.pgm","/6a.pgm","/6b.pgm"]
template7 = ["/7.pgm","/7a.pgm","/7b.pgm"]
template8 = ["/8.pgm","/8a.pgm","/8b.pgm"]
A0=1
A9=1
B0=1
A1=0
A2=0
A3=0
A4=0
A5=0
A6=0
A7=0
A8=0
B0=1
C0=1
C1=0
C2=1
D0=1
D1=1
#加载模板图片
clock = time.clock()
# Run template matching
while (True):
clock.tick()
img = sensor.snapshot()
while(A0): #开始模板匹配识别手持数字
clock.tick()
img = sensor.snapshot()
t1 = image.Image(template1[0])
r1 = img.find_template(t1, 0.80, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
if r1:
img.draw_rectangle(r1)
A1=1
A0=0
t2 = image.Image(template2[0])
r2 = img.find_template(t2, 0.80, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
if r2:
img.draw_rectangle(r2)
A2=1
A0=0
t3 = image.Image(template3[0])
r3 = img.find_template(t3, 0.85, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
if r3:
img.draw_rectangle(r3)
print('3') #打印模板名字
A3=1
A0=0
t4 = image.Image(template4[0])
r4 = img.find_template(t4, 0.80, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
if r4:
img.draw_rectangle(r4)
print('4') #打印模板名字
A4=1
A0=0
t5 = image.Image(template5[0])
r5 = img.find_template(t5, 0.80, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
if r5:
img.draw_rectangle(r5)
print('5') #打印模板名字
A5=1
A0=0
t6 = image.Image(template6[0])
r6 = img.find_template(t6, 0.80, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
if r6:
img.draw_rectangle(r6)
print('6') #打印模板名字
A6=1
A0=0
t7 = image.Image(template7[0])
r7 = img.find_template(t7, 0.80, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
if r7:
img.draw_rectangle(r7)
print('7') #打印模板名字
A7=1
A0=0
t8 = image.Image(template8[0])
r8 = img.find_template(t8, 0.85, step=4, search=SEARCH_EX) #, roi=(10, 0, 60, 60))
if r8:
img.draw_rectangle(r8)
print('8') #打印模板名字
A8=1
A0=0
while(A9): #识别到数字,发送指令给主控
if A1==1:
uart.write('1')
print('1') #打印模板名字
num=1
A9=0
if A2==1:
uart.write('2')
print('2') #打印模板名字
num=2
A9=0
if A3==1:
uart.write('3')
print('3')
num=3
A9=0
if A4==1:
uart.write('4')
print('4')
num=4
A9=0
if A5==1:
uart.write('5')
print('5')
num=5
A9=0
if A6==1:
uart.write('6')
print('6')
num=6
A9=0
if A7==1:
uart.write('7')
print('7')
num=7
A9=0
if A8==1:
uart.write('8')
print('8')
num=8
A9=0
while(True): #接受到主控指令,可以进行识别数字
while(B0):
if (uart.any()):
B = uart.read()
print(B)
if B==b'1':
print("1")
B0=0
C0=1
while(C0):
img = sensor.snapshot() #神经网络识别右边数字
roiL=(20,76,40,40)
for obj in tf.classify(net, img, roiL,min_scale=1, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5):
print("**********\nPredictions at [x=%d,y=%d,w=%d,h=%d]" % obj.rect())
img.draw_rectangle(obj.rect())
predictions_list = list(zip(labels, obj.output()))
for i in range(len(predictions_list)):
print("%s = %f" % (predictions_list[i][0], predictions_list[i][1]))
num1=ord(predictions_list[i][0])-48
if predictions_list[i][1]>0.7 and num1==num:
uart.write('1')
print('11')
C1=1
C0=0
roiR=(89,77,40,40) #神经网络识别左边数字
for obj in tf.classify(net, img, roiR,min_scale=1, scale_mul=0.8, x_overlap=0.5, y_overlap=0.5):
print("**********\nPredictions2 at [x=%d,y=%d,w=%d,h=%d]" % obj.rect())
img.draw_rectangle(obj.rect())
predictions_list2 = list(zip(labels, obj.output()))
for p in range(len(predictions_list2)):
print("%s = %f" % (predictions_list2[p][0], predictions_list2[p][1]))
num2=ord(predictions_list2[p][0])-48
if predictions_list2[p][1]>0.7 and num2 == num:
uart.write('2')
print("22")
C1=1
C0=0
if C1==0:
uart.write('0')
print("00")
print(clock.fps(), "fps")
五、机械部分
-
1、整车模型
如图为小车机械结构3D图。前轮采用两个牛眼轮进行辅助支撑,后轮为步进电机驱动的动力轮。长21cm、宽19.5cm、高24.5cm。

图中1为牛眼轮,2为八路灰度传感器模块,3为小车底板,4为六角铜柱,5为单片机和PCB扩展板,6为摄像头支架固定底座,7为OpenMV摄像头,8为药品,9为药仓,10为红外对射模块,11为步进电机驱动板,12为普通轮子,13为步进电机,14为12V锂电池,15为支撑座。 -
2、车底盘图
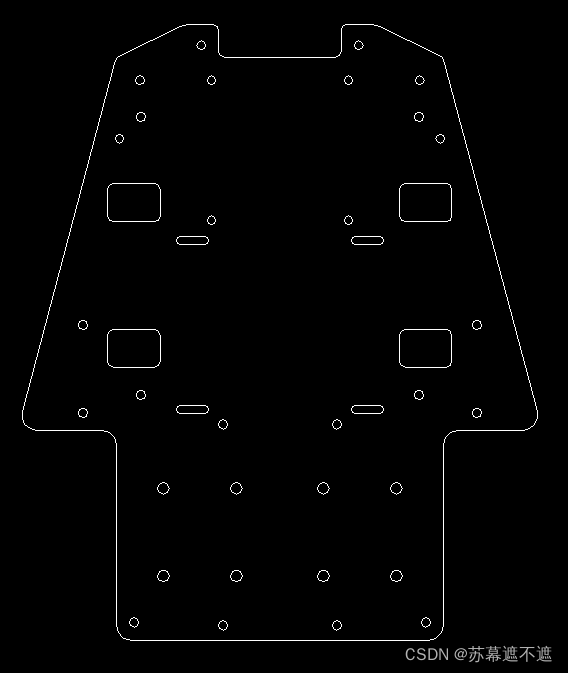
如图为车底盘CAD图,使用激光切割亚克力制成。厚度4mm左右。
最终成品图:
总结
1.选择自己最擅长的方案。不要去尝试其他不熟悉的方案,因为4天3页时间真的很紧急。打算做控制类一定要把通用代码准备好,如PID,视觉双机通信等。
2.作为队长要根据每个队员的优势长处设定任务,队长要担任起进度规划的重任,经常是“单核多线程”工作。每个队员都要有强烈的责任感,在选队员上是关键。例如我们队伍有一个机械,负责车组装和3d建模打印等操作,效率极高,半天时间就设计完,一天不到就组装出第一台车,为我们队伍节省了非常多宝贵的调试时间。
3.运气也是实力的一部分。本次比赛的题目非常符合我们队伍阵容,车控电控、神经网络、机械,完美适配我们三人的优势,也许这些都是命中注定。
4.颁奖典礼时听王越院士说到:建议电赛以后的题目越来越多的人工智能,现在机器学习、深度学习实在太火了,掌握深度学习这项技能十分重要,如果不懂视觉,这次的电赛可能就没办法打了。
附件
B站演示视频:https://www.bilibili.com/video/BV1Qb4y1i7Sn/
主控电路工程:https://oshwhub.com/AngleLeon/gong-ke-sai-xin-hao-zheng-ge-ban_copy#P5
主控代码:https://download.csdn.net/download/weixin_45902201/76727241
Openmv端代码:https://download.csdn.net/download/weixin_45902201/76727631
想白嫖代码请访问立创开源平台,不想麻烦可以直接下载