opencv(15)---图像膨胀腐蚀
基本概念
概述
膨胀、腐蚀属于形态学的操作, 简单来说就是基于形状的一系列图像处理操作
膨胀腐蚀是基于高亮部分(白色)操作的, 膨胀是対高亮部分进行膨胀, 类似“领域扩张”, 腐蚀是高亮部分被腐蚀, 类似“领域被蚕食”
膨胀腐蚀的应用和功能:
消除噪声
分割独立元素或连接相邻元素
寻找图像中的明显极大值、极小值区域
求图像的梯度其他相关:
开运算、闭运算
顶帽、黑帽
形态学梯度
代码
#include "mainwindow.h"
#include膨胀—dilate()
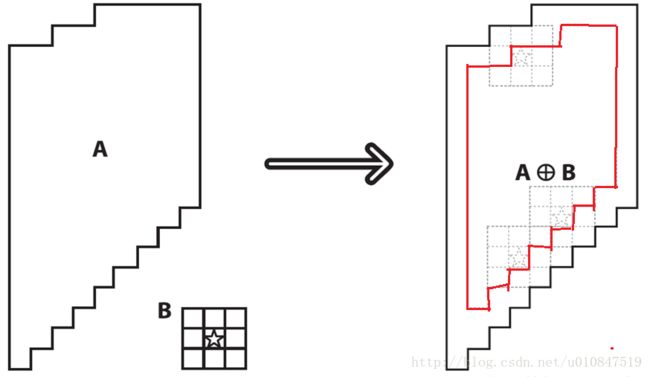
膨胀就是求局部最大值的操作, 从数学角度上来讲, 膨胀或腐蚀就是将图像(或区域)A与核B进行卷积。
核可以是任意大小和形状, 它有一个独立定义的参考点(锚点), 多数情况下, 核是一个小的中间带参考点和实心正方形或者圆盘, 可以看做是一个模板或掩码。
膨胀是求局部最大值的操做, 核B与图形卷积, 即核B覆盖的区域的像素点的最大值, 并把这个最大值复制给参考点指定的像素, 这样就会使图像中的高亮区域逐渐增长, 如下图所示:
函数原型
1. dilate
CV_EXPORTS_W void dilate( InputArray src, OutputArray dst, InputArray kernel,
Point anchor = Point(-1,-1), int iterations = 1,
int borderType = BORDER_CONSTANT,
const Scalar& borderValue = morphologyDefaultBorderValue() );
- src: 输入原图像(建议为二值图)
- dst: 输出图像要求和src一样的尺寸和类型
- kernel: 膨胀操作的核, 当为NULL时, 表示使用参考点位于中心的3x3的核
一般使用getStructuringElement获得指定形状和尺寸的结构元素(核) - anchor: 锚的位置, 默认值Point(-1,-1), 表示位于中心
- interations: 膨胀的次数
- borderType: 边界模式, 一般采用默认值
- borderValue: 边界值, 一般采用默认值
2. getStructuringElement
- 可选以下三种形状: 矩形、交叉形、椭圆形
ksize和anchor分别表示内核尺寸和锚点位置
矩形
交叉性
腐蚀—erode()
腐蚀和膨胀相反, 是取局部最小值, 高亮区域逐渐减小, 如下图所示:

函数原型
CV_EXPORTS_W void dilate( InputArray src, OutputArray dst, InputArray kernel,
Point anchor = Point(-1,-1), int iterations = 1,
int borderType = BORDER_CONSTANT,
const Scalar& borderValue = morphologyDefaultBorderValue() );
形态学其他操作—morphologyEx()
开运算、闭运算、顶帽、黒帽、形态学梯度
基于膨胀腐蚀基础, 利用morphologyEx()函数进行操作
函数原型
1.
CV_EXPORTS_W void morphologyEx( InputArray src, OutputArray dst,
int op, InputArray kernel,
Point anchor = Point(-1,-1), int iterations = 1,
int borderType = BORDER_CONSTANT,
const Scalar& borderValue = morphologyDefaultBorderValue() );- src: 输入原图像
- dst: 输出图像要求和src一样的尺寸和类型
- op: 表示形态学运算的类型
- kernel: 形态学运算内核, 若为NULL, 表示使用参考点位于中心的3x3内核, 一般使用 getStruecuringElement函数获得
- anchor: 锚的位置, 默认值Point(-1,-1), 表示位于中心
- interations: 迭代使用函数的次数, 默认为1
- borderType: 边界模式, 一般采用默认值
- borderValue: 边界值, 一般采用默认值
-
2. OP取值类型
开运算(open)
概念
开运算是先腐蚀后膨胀的过程,
1)开运算可以用来消除小物体,
2)在纤细点处分离物体,
3)在平滑较大物体边界的同时不明显的改变其面积。
代码
morphologyEx(srcImg,dstImg,MORPH_OPEN,element);运行结果

闭运算(close)
概念
闭运算是先膨胀后腐蚀的过程, 闭运算可以用来消除小型黑洞(黑色区域)
代码
morphologyEx(srcImg,dstImg,MORPH_CLOSR,element);运行结果

形态学梯度(Gradient)
概念
形态学梯度是膨胀图与腐蚀图之差, 对二值图可以将团块(blob)边缘凸显出来来保留边缘轮廓
代码
morphologyEx(srcImg,dstImg,MORPH_GRADIENT,element);运行结果

顶帽(Top Hat)
概念
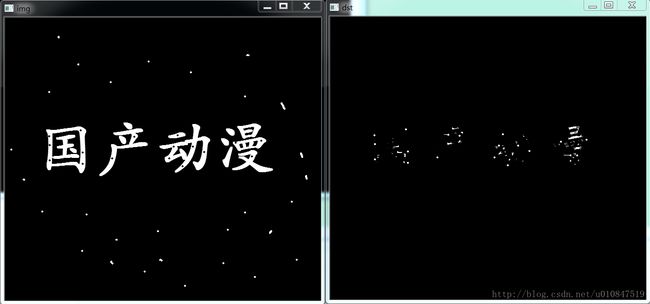
顶帽运算也被称为”礼帽”, 是闭运算结果和原图像做差的结果, 可以用来分离比邻近点亮一些的斑块
代码
morphologyEx(srcImg,dstImg,MORPH_TOPHAT,element);运行结果

黒帽(Black Hat)
概念
黑帽运算是原图像和开运算做差的结果, 可以用来分离比邻近点暗一些的斑块。
代码
morphologyEx(srcImg,dstImg,MORPH_BLACKHAT,element);运行结果
膨胀腐蚀小应用
膨胀腐蚀走迷宫

代码
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/core/core.hpp"
#includereturn 0;
}
Mat img = imread(imgName, 1);
if(!img.empty())
{
threshold(img, img, thres_min, 255, THRESH_BINARY);
imshow("img", img);
Mat Copy;
img.copyTo(Copy);
cvtColor(Copy, Copy, CV_BGR2GRAY);
threshold(Copy, Copy, thres_min, 255, THRESH_BINARY_INV);
imshow("copy", Copy);
vector<vectorreturn 0;
}
Mat draw;
draw = Mat::zeros(img.size(), CV_32FC1);
cout<0, Scalar(255), -2);
imshow("img2", draw);
Mat dilated, eroded;
Mat kernel=Mat::ones(21, 21, CV_8UC1);
dilate(draw, dilated, kernel, Point(-1,-1), 2, BORDER_CONSTANT);
imshow("dilate", dilated);
erode(dilated, eroded, kernel, Point(-1,-1), 2, BORDER_CONSTANT);
imshow("erode", eroded);
Mat diff;
absdiff(dilated, eroded, diff);
diff.convertTo(diff, CV_8UC1);
imshow("diff", diff);
vector<vectorreturn 0;
}
waitKey(0);
destroyAllWindows();
}