ROS话题通信实现发布接收(五)C++版本
在ROS中每一个功能点都是一个单独的进程,每一个进程都是独立运行的
ROS是进程(也称为Nodes)的分布式框架。 因为这些进程甚至还可分布于不同主机,不同主机协同工作,从而分散计算压力。
不过随之也有一个问题: 不同的进程是如何通信(不同进程间如何实现数据交换)的?这就是ROS中的通信机制了。
ROS 中的基本通信机制主要有如下三种实现策略:
话题通信(发布订阅模式)
服务通信(请求响应模式)
参数服务器(参数共享模式)话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息
机器人在执行导航功能,使用的传感器是激光雷达,
机器人会采集激光雷达感知到的信息并计算,
然后生成运动控制信息驱动机器人底盘运动。在上述场景中,就不止一次使用到了话题通信。
- 以激光雷达信息的采集处理为例,在 ROS 中有一个节点需要时时的发布当前雷达采集到的数据,导航模块中也有节点会订阅并解析雷达数据。
- 再以运动消息的发布为例,导航模块会根据传感器采集的数据时时的计算出运动控制信息并发布给底盘,底盘也可以有一个节点订阅运动信息并最终转换成控制电机的脉冲信号。
小结:发信号的是发布方,接收信号的是订阅方
以此类推,像雷达、摄像头、GPS.... 等等一些传感器数据的采集,也都是使用了话题通信,换言之,话题通信适用于不断更新的数据传输相关的应用场景。
目录
理论模型
话题通信基本操作A(C++)
1.先写发布方实现
2.订阅方实现
理论模型

话题通信基本操作A(C++)

流程实际上就是

1.先写发布方实现
先创建工作空间
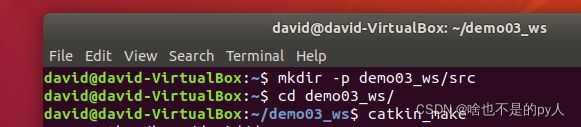
然后
code .打开vscode

{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
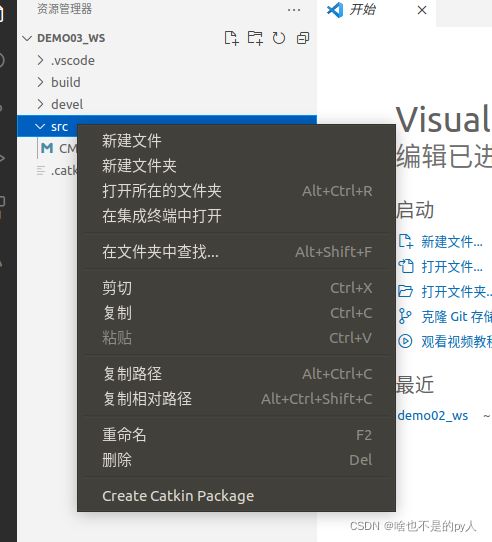
创建初始包

然后新建文件
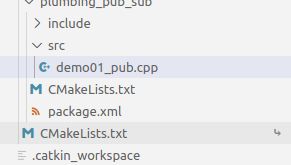
然后编写代码
/*
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
PS: 二者需要设置相同的话题
消息发布方:
循环发布信息:HelloWorld 后缀数字编号
实现流程:
1.包含头文件
2.初始化 ROS 节点:命名(唯一)
3.实例化 ROS 句柄
4.实例化 发布者 对象
5.组织被发布的数据,并编写逻辑发布数据
*/
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include
int main(int argc, char *argv[])
{
//设置编码
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(argc,argv,"talker");
//3.实例化 ROS 句柄
ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能
//4.实例化 发布者 对象
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
ros::Publisher pub = nh.advertise("chatter",10);
//5.组织被发布的数据,并编写逻辑发布数据
//数据(动态组织)
std_msgs::String msg;
// msg.data = "你好啊!!!";
std::string msg_front = "Hello 你好!"; //消息前缀
int count = 0; //消息计数器
//逻辑(一秒10次)
ros::Rate r(1);
//节点不死
while (ros::ok())
{
//使用 stringstream 拼接字符串与编号
std::stringstream ss;
ss << msg_front << count;
msg.data = ss.str();
//发布消息
pub.publish(msg);
//加入调试,打印发送的消息
ROS_INFO("发送的消息:%s",msg.data.c_str());
//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;
r.sleep();
count++;//循环结束前,让 count 自增
//暂无应用
ros::spinOnce();
}
return 0;
}
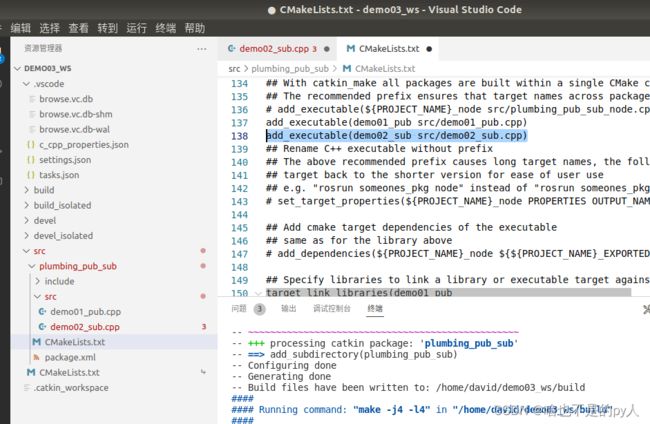
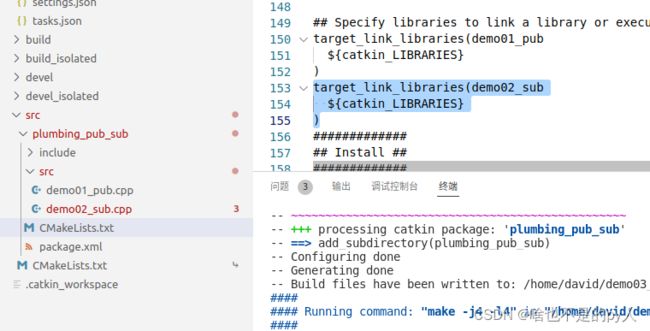
然后配置cmakelist.txt

一般用文件名当节点名称

改成上方命名的节点名称

改完后ctrl shift b 编译一下即可
然后再在桌面开一个终端打开roscore
然后再打开一个终端

备注:
[rosrun] Couldn't find executable named demo01_pub below /home/david/demo03_ws/src/plumbing_pub_sub如果出现了这个报错那么应该是上面编译没选对
要选catkin_make:build这个编译任务然后要对应修改其json文件
2.订阅方实现
新建文件

然后分屏一下,点击右边的那个书一样的按钮

然后把订阅方代码复制进去
/*
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
消息订阅方:
订阅话题并打印接收到的消息
实现流程:
1.包含头文件
2.初始化 ROS 节点:命名(唯一)
3.实例化 ROS 句柄
4.实例化 订阅者 对象
5.处理订阅的消息(回调函数)
6.设置循环调用回调函数
*/
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h"
void doMsg(const std_msgs::String::ConstPtr& msg_p){
ROS_INFO("我听见:%s",msg_p->data.c_str());
// ROS_INFO("我听见:%s",(*msg_p).data.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
ros::init(argc,argv,"listener");
//3.实例化 ROS 句柄
ros::NodeHandle nh;
//4.实例化 订阅者 对象
ros::Subscriber sub = nh.subscribe("chatter",10,doMsg);
//5.处理订阅的消息(回调函数)
// 6.设置循环调用回调函数
ros::spin();//循环读取接收的数据,并调用回调函数处理
return 0;
}
然后修改cmakelist.txt那个文件
然后ctrl shift b编译一下
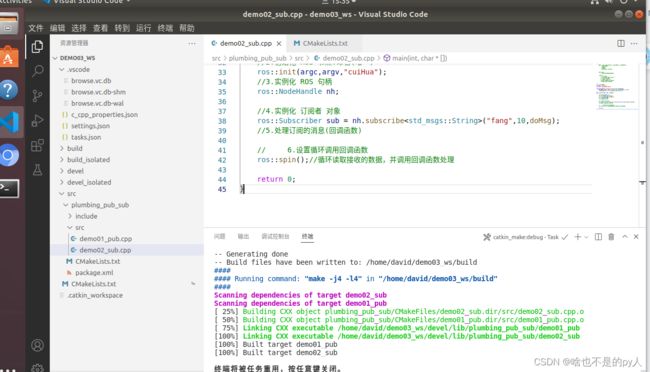
然后
开三个终端
第一个roscore
第二个

第三个订阅方

成功接收信息
备注
每次修改完代码记得重新编译
#include "ros/ros.h"导入包的时候显示报错先不用管,这是因为没有编译导致的
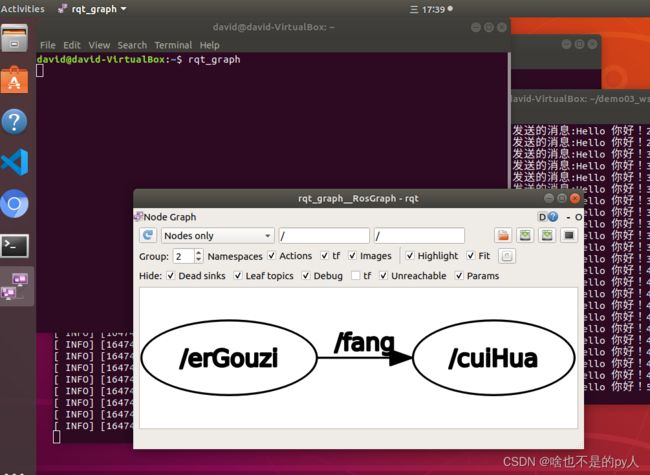
启动计算图