YOLO V5解读
YOLO V5
1.对于V4的改进
1.YOLOv5在YOLOv4算法的基础上做了进一步的改进,检测性能得到进一步的提升
1.自适应锚框计算。
2.仍然采用Mosaic数据增强。
1.1在Yolo算法中,针对不同的数据集,都会有初始设定长宽的锚框。在网络训练中,网络在初始锚框的基础上输出预测框,进而和真实框groundtruth进行比对,计算两者差距,再反向更新,迭代网络参数。

Yolov5中将此功能嵌入到代码中,每次训练时,自适应的计算不同训练集中的最佳锚框值。
当然,如果觉得计算的锚框效果不是很好,也可以在代码中将自动计算锚框功能关闭。
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
2.yolov5整体框架
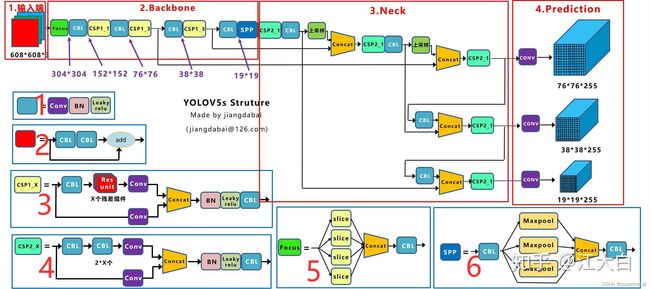
1.上图展示了YOLOv5目标检测算法的整体框图。对于一个目标检测算法而言,我们通常可以将其划分为4个通用的模块,具体包括:输入端、基准网络、Neck网络与Head输出端,对应于上图中的4个红色模块。YOLOv5算法具有4个版本,具体包括:YOLOv5s、YOLOv5m、YOLOv5l、YOLOv5x四种,本文重点讲解YOLOv5s
1.组件基础
- CBL-CBL模块由Conv+BN+Leaky_relu激活函数组成,如上图中的模块1所示。
- Res unit-借鉴ResNet网络中的残差结构,用来构建深层网络,CBM是残差模块中的子模块,如上图中的模块2所示。
- CSP1_X-借鉴CSPNet网络结构,该模块由CBL模块、Res unint模块以及卷积层、Concate组成而成,如上图中的模块3所示。
- CSP2_X-借鉴CSPNet网络结构,该模块由卷积层和X个Res unint模块Concate组成而成,如上图中的模块4所示。
- Focus-如上图中的模块5所示,Focus结构首先将多个slice结果Concat起来,然后将其送入CBL模块中。
- SPP-采用1×1、5×5、9×9和13×13的最大池化方式,进行多尺度特征融合,如上图中的模块6所示。
2.网络基本架构
- 输入端-输入端表示输入的图片。该网络的输入图像大小为608*608,该阶段通常包含一个图像预处理阶段,即将输入图像缩放到网络的输入大小,并进行归一化等操作。在网络训练阶段,YOLOv5使用Mosaic数据增强操作提升模型的训练速度和网络的精度;并提出了一种自适应锚框计算与自适应图片缩放方法。
- 基准网络-基准网络通常是一些性能优异的分类器种的网络,该模块用来提取一些通用的特征表示。YOLOv5中不仅使用了CSPDarknet53结构,而且使用了Focus结构作为基准网络。
- Neck网络-Neck网络通常位于基准网络和头网络的中间位置,利用它可以进一步提升特征的多样性及鲁棒性。虽然YOLOv5同样用到了SPP模块、FPN+PAN模块,但是实现的细节有些不同。
- Head输出端-Head用来完成目标检测结果的输出。针对不同的检测算法,输出端的分支个数不尽相同,通常包含一个分类分支和一个回归分支。YOLOv4利用GIOU_Loss来代替Smooth L1 Loss函数,从而进一步提升算法的检测精度。
3.自适应锚框计算
在YOLOv3和YOLOv4检测算法中,训练不同的数据集时,都是通过单独的程序运行来获得初始锚点框。YOLOv5中将此功能嵌入到代码中,每次训练时,根据数据集的名称自适应的计算出最佳的锚点框,用户可以根据自己的需求将功能关闭或者打开,具体的指令为parser.add_argument(’–noautoanchor’, action=‘store_ true’, help=‘disable autoanchor check’),如果需要打开,只需要在训练代码时增加–noautoanch or选项即可。
4.自适应图片缩放
针对不同的目标检测算法而言,我们通常需要执行图片缩放操作,即将原始的输入图片缩放到一个固定的尺寸,再将其送入检测网络中,很多照片的长宽都是不一样的,所以我们加入黑边进行填充。


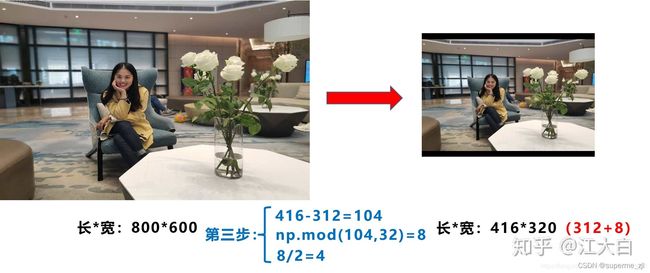
如上图所示,416表示YOLOv5网络所要求的图片宽度,312表示缩放后图片的宽度。首先执行相减操作来获得需要填充的黑边长度104;然后对该数值执行取余操作,即104%32=8,使用32是因为整个YOLOv5网络执行了5次下采样操作,2的5次方是32,对得到的8除以2,即上下两边填充的黑边。
需要注意的是:(1)该操作仅在模型推理阶段执行,模型训练阶段仍然和传统的方法相同,将原始图片裁剪到416*416大小;(2)YOLOv3与YOLOv4中默认填充的数值是(0,0,0),而YOLOv5中默认填充的数值是(114,114,114);(3)该操作仅仅针对原始图片的短边而言,仍然将长边裁剪到416。
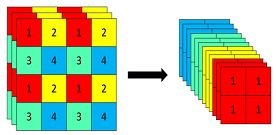
5.与v4新增Focus结构
Focus结构的主要思想是通过slice操作来对输入图片进行裁剪。如下图所示,原始输入图片大小为6086083,经过Slice与Concat操作之后输出一个30430412的特征映射;接着经过一个通道个数为32的Conv层(该通道个数仅仅针对的是YOLOv5s结构,其它结构会有相应的变化),输出一个30430432大小的特征映射。
Focus模块在v5中是图片进入backbone前,对图片进行切片操作,具体操作是在一张图片中每隔一个像素拿到一个值,类似于邻近下采样,这样就拿到了四张图片,四张图片互补,长的差不多,但是没有信息丢失,这样一来,将W、H信息就集中到了通道空间,输入通道扩充了4倍,即拼接起来的图片相对于原先的RGB三通道模式变成了12个通道,最后将得到的新图片再经过卷积操作,最终得到了没有信息丢失情况下的二倍下采样特征图。
以yolov5s为例,原始的640 × 640 × 3的图像输入Focus结构,采用切片操作,先变成320 × 320 × 12的特征图,再经过一次卷积操作,最终变成320 × 320 × 32的特征图。切片操作如下:
CSP结构中-YOLOv4网络结构中,借鉴了CSPNet的设计思路,仅仅在主干网络中设计了CSP结构。而YOLOv5中设计了两种CSP结构,以YOLOv5s网络为例,CSP1_X结构应用于Backbone主干网络中,另一种CSP2_X结构则应用于Neck网络中。CSP1_X与CSP2_X模块。
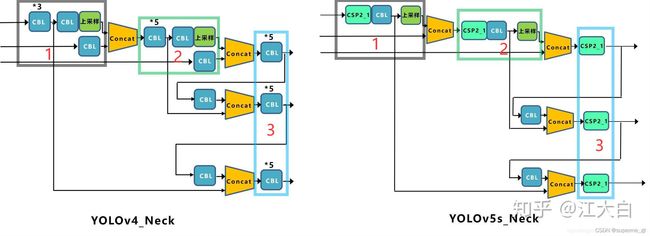
6.Neck网络
FPN+PAN-YOLOv5的Neck网络仍然使用了FPN+PAN结构,但是在它的基础上做了一些改进操作,YOLOv4的Neck结构中,采用的都是普通的卷积操作。而YOLOv5的Neck网络中,采用借鉴CSPnet设计的CSP2结构,从而加强网络特征融合能力。下图展示了YOLOv4与YOLOv5的Neck网络的具体细节,通过比较我们可以发现:(1)灰色区域表示第1个不同点,YOLOv5不仅利用CSP2_\1结构代替部分CBL模块,而且去掉了下方的CBL模块;(2)绿色区域表示第2个不同点,YOLOv5不仅将Concat操作之后的CBL模块更换为CSP2_1模块,而且更换了另外一个CBL模块的位置;(3)蓝色区域表示第3个不同点,YOLOv5中将原始的CBL模块更换为CSP2_1模块。
7.总结
以上就是最主要的一些要点。