多传感器融合定位(1-3D激光里程计)6-实现手写icp
多传感器融合定位(1-3D激光里程计)6-实现手写icp
ps: 因为个人能力不足,本次代码 和 伪代码 框图 主要是参考 go on 大佬的,本人只是搬运工做记录
ps:本文 来自 go on 助教的讲解ppt
伪代码框图 ps:图来自 go on 助教的讲解

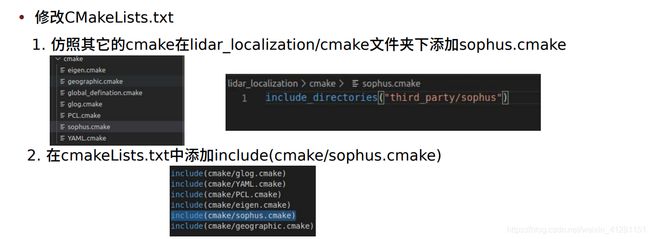
添加sophus 库
sophus库代码地址

代码实现
添加icp_registration_manual.hpp
/*
* @Description: ICP 匹配模块
* @Author: KaHo
* @Date: 2020-10-17 21:46:57
*/
#ifndef LIDAR_LOCALIZATION_MODELS_REGISTRATION_ICP_REGISTRATION_MANUAL_HPP_
#define LIDAR_LOCALIZATION_MODELS_REGISTRATION_ICP_REGISTRATION_MANUAL_HPP_
#include 添加icp_registration_manual.cpp
/*
* @Description: ICP 匹配模块
* @Author: Ren Qian
* @Date: 2020-02-08 21:46:45
*/
#include "lidar_localization/models/registration/icp_registration_manual.hpp"
#include "glog/logging.h"
#include 修改 front_end.cpp
//选择配准方式
bool FrontEnd::InitRegistration(std::shared_ptr<RegistrationInterface>& registration_ptr, const YAML::Node& config_node) {
std::string registration_method = config_node["registration_method"].as<std::string>();
LOG(INFO) << "点云匹配方式为:" << registration_method;
//NDT配准
if (registration_method == "NDT") {
registration_ptr = std::make_shared<NDTRegistration>(config_node[registration_method]);
}
else if (registration_method == "ICP") {
registration_ptr = std::make_shared<ICPRegistration>(config_node[registration_method]);
}
else if (registration_method == "ICP_MANUAL") {
registration_ptr = std::make_shared<ICPRegistrationManual>(config_node[registration_method]);
}
else {
LOG(ERROR) << "没找到与 " << registration_method << " 相对应的点云匹配方式!";
return false;
}
return true;
}
修改 config.yaml
data_path: ./ # 数据存放路径
# 匹配
registration_method: ICP_MANUAL # 选择点云匹配方法,目前支持:NDT ICP ICP_MANUAL
# 局部地图
key_frame_distance: 2.0 # 关键帧距离
local_frame_num: 20
local_map_filter: voxel_filter # 选择滑窗地图点云滤波方法,目前支持:voxel_filter
# rviz显示
display_filter: voxel_filter # rviz 实时显示点云时滤波方法,目前支持:voxel_filter
# 当前帧
frame_filter: voxel_filter # 选择当前帧点云滤波方法,目前支持:voxel_filter
# 各配置选项对应参数
## 匹配相关参数
ICP:
max_correspondence_distance : 1.0
max_iter : 30
trans_eps : 1e-6
euclidean_fitness_eps : 1e-6
ransac_iter: 0
fitness_score: 0.3
NDT:
res : 1.0
step_size : 0.1
trans_eps : 0.01
max_iter : 30
ICP_MANUAL:
max_correspondence_distance : 1.0
max_iter : 30
## 滤波相关参数
voxel_filter:
local_map:
leaf_size: [0.6, 0.6, 0.6]
frame:
leaf_size: [1.3, 1.3, 1.3]
display:
leaf_size: [0.5, 0.5, 0.5]
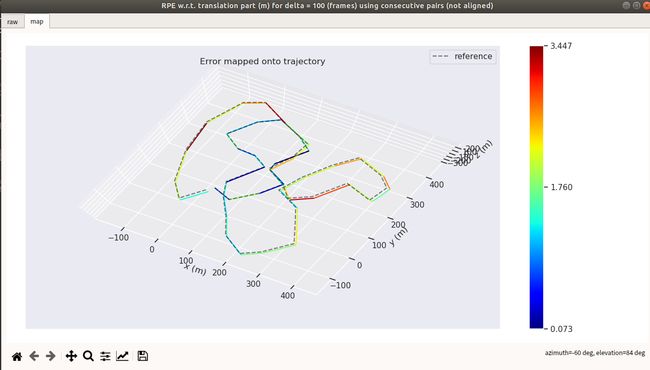
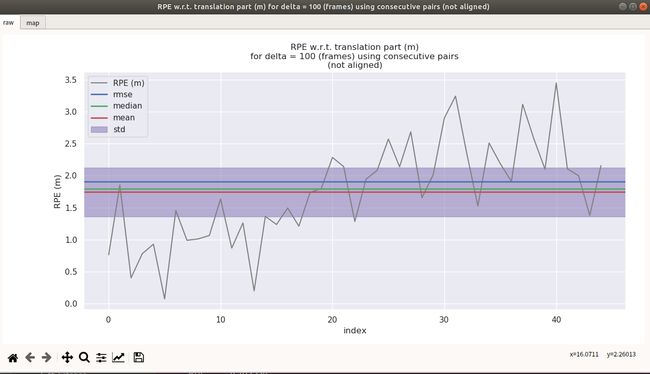
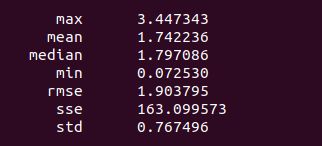
icp manual 效果图


evo 精度评价结果
PCL-NDT PCL-ICP ICP 对比结果
ps: 对比图 来自 go on 助教的讲解
