可视化pytorch网络特征图
0. 背景
在目标检测任务中,我们会使用多尺度的特征图进行预测,背后的常识是:浅层特征图包含丰富的边缘信息有利于定位小目标,高层特征图中包含大量的语义信息有利于大目标的定位和识别。为了进一步了解特征图包含的信息,可以通过可视化特征图直观的认识到神经网络学习得到的东西。此外,对于分析网络为什么有效和改进网络也有些许帮助。
1. pytorch提供的函数
1.1. register_forward_hook

利用register_forward_hook在特定的module上添加一个hook函数,对该module的输入和输出特征图进行分析。
1.2 save_image

利用save_image可以将单个通道的特征图拼接,并直接保存到磁盘上。
2. VGG可视化特征图示例
- 输入图像example.jpg

- 代码
import torch
from torch import nn
from torchvision import models, transforms
from PIL import Image
from torchvision.utils import make_grid, save_image
import os
# model
net = models.vgg16_bn(pretrained=True).cuda()
# image pre-process
transforms_input = transforms.Compose([transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])])
fImg = Image.open("input_image.jpg").convert('RGB')
data = transforms_input(fImg).unsqueeze(0).cuda()
# feature image save path
FEATURE_FOLDER = "./outputs/features"
if not os.path.exists(FEATURE_FOLDER):
os.mkdir(FEATURE_FOLDER)
# three global vatiable for feature image name
feature_list = list()
count = 0
idx = 0
def get_image_path_for_hook(module):
global count
image_name = feature_list[count] + ".png"
count += 1
image_path = os.path.join(FEATURE_FOLDER, image_name)
return image_path
def hook_func(module, input, output):
image_path = get_image_path_for_hook(module)
data = output.clone().detach()
global idx
print(idx, "->", data.shape)
idx+=1
data = data.data.permute(1, 0, 2, 3)
save_image(data, image_path, normalize=False)
for name, module in net.named_modules():
if isinstance(module, torch.nn.Conv2d):
print(name)
feature_list.append(name)
module.register_forward_hook(hook_func)
out = net(data)- 输出log
通过输出的log可以了解到哪些符合要求的特征图以及它们的大小被打印出来了。
features.0
features.3
features.7
features.10
features.14
features.17
features.20
features.24
features.27
features.30
features.34
features.37
features.40
0 -> torch.Size([1, 64, 224, 224])
1 -> torch.Size([1, 64, 224, 224])
2 -> torch.Size([1, 128, 112, 112])
3 -> torch.Size([1, 128, 112, 112])
4 -> torch.Size([1, 256, 56, 56])
5 -> torch.Size([1, 256, 56, 56])
6 -> torch.Size([1, 256, 56, 56])
7 -> torch.Size([1, 512, 28, 28])
8 -> torch.Size([1, 512, 28, 28])
9 -> torch.Size([1, 512, 28, 28])
10 -> torch.Size([1, 512, 14, 14])
11 -> torch.Size([1, 512, 14, 14])
12 -> torch.Size([1, 512, 14, 14])通过下面两行代码可以得到VGG网络中的所有module以及它们的name,可用于后续的对比验证保存得到的特征图结果时候正确。
for name, layer in net.named_modules():
print(name, '->', layer)features.0 -> Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.1 -> BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.2 -> ReLU(inplace=True)
features.3 -> Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.4 -> BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.5 -> ReLU(inplace=True)
features.6 -> MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
features.7 -> Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.8 -> BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.9 -> ReLU(inplace=True)
features.10 -> Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.11 -> BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.12 -> ReLU(inplace=True)
features.13 -> MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
features.14 -> Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.15 -> BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.16 -> ReLU(inplace=True)
features.17 -> Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.18 -> BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.19 -> ReLU(inplace=True)
features.20 -> Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.21 -> BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.22 -> ReLU(inplace=True)
features.23 -> MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
features.24 -> Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.25 -> BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.26 -> ReLU(inplace=True)
features.27 -> Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.28 -> BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.29 -> ReLU(inplace=True)
features.30 -> Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.31 -> BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.32 -> ReLU(inplace=True)
features.33 -> MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
features.34 -> Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.35 -> BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.36 -> ReLU(inplace=True)
features.37 -> Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.38 -> BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.39 -> ReLU(inplace=True)
features.40 -> Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
features.41 -> BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
features.42 -> ReLU(inplace=True)
features.43 -> MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)输出特征图的结果
- features.3.png
- feature.17.png
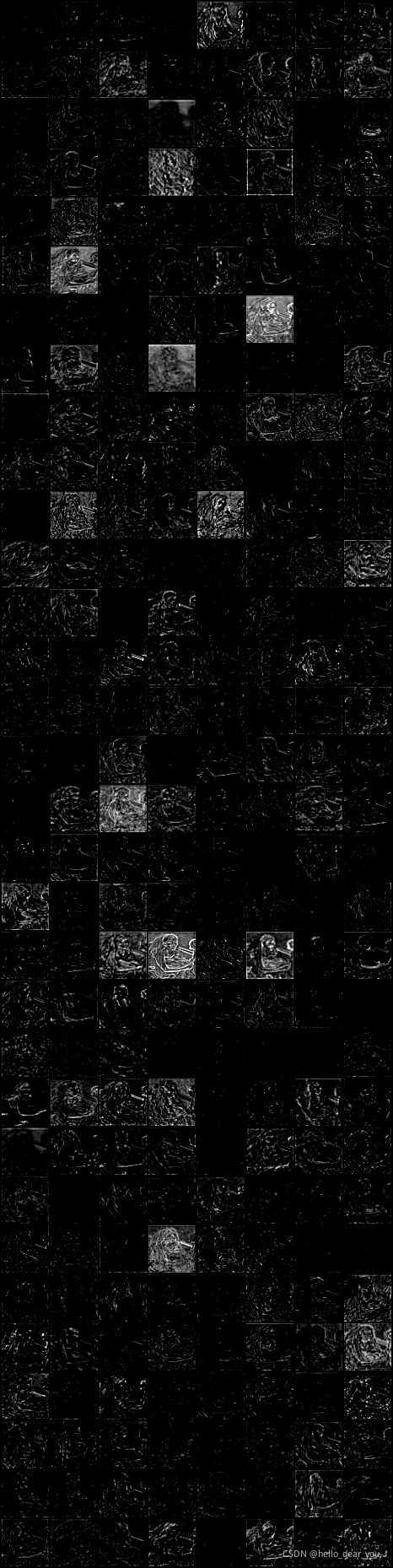
通过上述的分析过程,可以得到VGG网络中不同卷积层输出的特征图,同时可以修改module的匹配原则得到其他类型层的输出,也即在合适的module后面添加本文的hook_func函数就可以对其特征图进行可视化。
参考链接
Pytorch可视化特征图_吹吹自然风-CSDN博客_可视化特征图