论文阅读 || 目标检测系列——一文读懂YOLOv3
写在前面:
yolo3的了解,需要在yolo1和yolo2的基础上
yolo1:https://blog.csdn.net/magic_ll/article/details/105814514
yolo2:https://blog.csdn.net/magic_ll/article/details/106298494
.
yolo3的论文介绍的相对简单,主要还是需要阅读实现代码。自己阅读版本链接:https://github.com/YunYang1994/tensorflow-yolov3。 并重新训练了自己的数据,来更好的理解yolo3。
yolo3的解读,论文和实现工程以及其他博主的解读,然后根据自己的理解,完成了这篇yolo3的解析。
.YOLO3的改进主要有:
- 调整了网络结构,并利用多尺度特征进行对象检测
- loss的优化
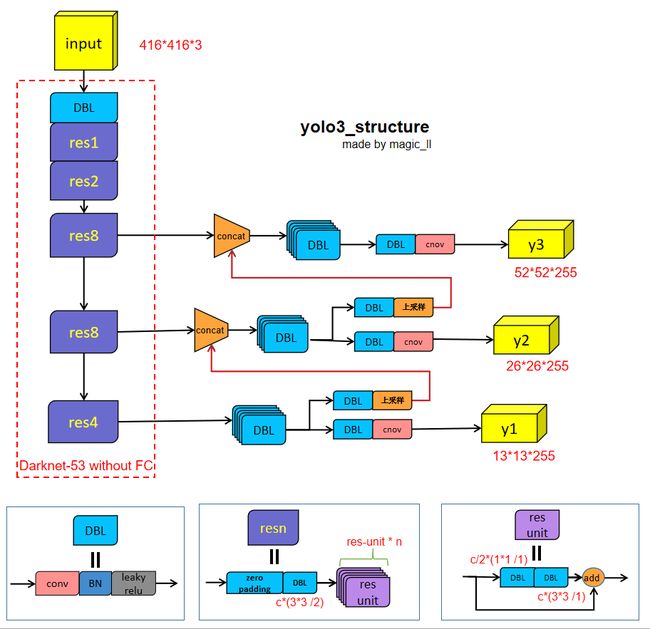
1 网络结构Darknet-53
图中结构模块:
- DBL: c o n v + B N + l e a k y . r e l u conv+BN+leaky.relu conv+BN+leaky.relu 。构成了yolo3的结构中的最小组件,除最后一层卷积。(一般的,神经网络中都是如此,这里将relu更换为leaky-relu)
注意 leaky ReLU 作为激活函数- res-unit:这个模块是借鉴了ResNet的残差结构,可以让网络变得更深(yolo2中的darknet-19 -->> yolo3 中的darknet-53,前者没有残差结构)。
1. 1. 1. 残差结构中有一个直连通道,所以 i n p u t . s h a p e = o u t p u t . s h a p e = ( b a t c h , h , w , c ) input.shape = output.shape = (batch,h,w,c) input.shape=output.shape=(batch,h,w,c)。
2. 2. 2. 第一层卷积为 c / 2 ∗ ( 1 ∗ 1 / 1 ) c/2*(1*1 /1) c/2∗(1∗1/1)
3. 3. 3. 第二层卷积为 c ∗ ( 3 ∗ 3 / 1 ) c *( 3*3 /1) c∗(3∗3/1)- resn:n代表数字,代表着含有n个res-unit模块。yolo3结构中有res1,res2,res4,res8。每一个resn会带来feature map的降维1/2,模块中的第一个卷积为: c ∗ ( 3 ∗ 3 / 2 ) c*(3*3 / 2) c∗(3∗3/2),与zeropadding一起完成特征图的降维。
- concat:注意与add的区别。
add:来源于ResNet思想,让卷积学习输入与输出的差量,即 y = f ( x ) + x y=f(x)+x y=f(x)+x
concat:来源于DenseNet网络的设计思路,将特征图按照通道维度直接进行拼接- 上采样:将小尺寸特征图通过插值(近邻插值算法等)等方法,得到大尺寸的图像。不改变通道数
.
网络设计思想:
- yolo3借鉴了金字塔特征图思想(FPN论文中):小尺寸特征用于检测大尺寸物体,大尺寸特征图检测小尺寸物体。
yolo3总共输出了3个特征图,三个特征图分别下采样倍数 32 , 16 , 8 32,16,8 32,16,8。网络会将特征图“倍数32”,上采样尺寸到16和特征图“倍数16”,进行concat;再将特征图“倍数16”上采样尺寸到8 和特征图“倍数8”进行concat。- 每个特征图的输出围度为 N ∗ N ∗ [ 3 ∗ ( 4 + 1 + 80 ) ] N*N*[3*(4+1+80)] N∗N∗[3∗(4+1+80)]。其中 N ∗ N N*N N∗N为输出特征图的grid数量;3为一个grid有3个anchor box;每个box有4维预测框位置 t x , t y , t w , t h t_x,t_y,t_w,t_h tx,ty,tw,th,1维预测框的 c o n f i d e n c e confidence confidence,80维物体的 c l a s s e s classes classes。所以输出为 N ∗ N ∗ 255 N*N*255 N∗N∗255。
2 yolo3输出特征图解码
2.1 yolo3的label
以输入尺寸 416x416x3 为例,此时的网络的输出尺寸为13x13, 26x26, 52x52。
先验框的设定
与yolo2一样,使用 K − m e a n s K-means K−means聚类得到先验框的尺寸。每个尺寸的输出设定3个先验框,一共9个。在COCO数据集上(原始图片全部resize为416 × 416),9个先验框为:(10x13),(16x30),(33x23),(30x61),(62x45),(59x199),(116x90),(156x198),(373x326)。
- 遵循“大尺寸预测小物体,小尺寸预测大物体”的原则,
13*13的特征图有较大感受野,对应的先验框(116x90),(156x198),(373x326)
26*26的特征图有中等感受野,对应的先验框(30x61),(62x45),(59x199)
52*52的特征图有较小感受野,对应的先验框(10x13),(16x30),(33x23)
注意:先验框只与检验框的w,、h有关,与x、y无关置信度的设定
方式1:yolo1 & yolo2中, c o n f i d e n c e b o x = 1 是 否 存 在 物 体 ∗ I O U p r e d t r u e confidence_{box}=1_{是否存在物体}*IOU_{pred}^{true} confidencebox=1是否存在物体∗IOUpredtrue
- 该方式置信度的标签会始终很小,无法有效的学习,检测时召回率不高。例:在训练过程中,某些 ∗ I O U p r e d t r u e *IOU_{pred}^{true} ∗IOUpredtrue的极限为0.8,然后以0.8作为标签训练,神经网络学习的结果为0.6,这时候设置阈值0.7,就会把正确的框丢弃了。尤其在小物体的与测试,几个像素值就很大程度上影响着IOU。
方式2:yolo3中, c o n f i d e n c e b o x = 1 是 否 存 在 物 体 confidence_{box}=1_{是否存在物体} confidencebox=1是否存在物体,也就是非0即1。
.
2.2 网络输出的解码
前面说过,每个特征图的输出围度为 N ∗ N ∗ 3 ∗ ( 4 + 1 + 80 ) N*N*3*(4+1+80) N∗N∗3∗(4+1+80)。其中 N ∗ N N*N N∗N为输出特征图的grid数量;3为一个grid有3个anchor box;每个box有4维预测框位置 t x , t y , t w , t h t_x,t_y,t_w,t_h tx,ty,tw,th,1维预测框的 c o n f i d e n c e confidence confidence,80维物体的 c l a s s e s classes classes。
检测框解码
获取到了网络的输出以及先验框后,解码检测框 x , y , w , h x,y,w,h x,y,w,h: b x = σ ( t x ) + c x b_x=\sigma (t_x)+c_x bx=σ(tx)+cx b y = σ ( t y ) + c y b_y=\sigma (t_y)+c_y by=σ(ty)+cy b w = p w e t w b_w=p_we^{t_w} bw=pwetw b h = p h e t n b_h=p_he^{t_n} bh=phetn其中: t x , t y , t w , t h t_x,t_y,t_w,t_h tx,ty,tw,th为网络输出的部分内容; σ ( t x ) , σ ( t y ) \sigma (t_x),\sigma (t_y) σ(tx),σ(ty)是基于矩形框中心点左上角格点坐标的偏移量; p w , p h p_w,p_h pw,ph是先验框的宽高。这组公式在yolo2中有详细介绍。得到的 b x , b y , b w , b h b_x,b_y,b_w,b_h bx,by,bw,bh为预测框的中心和宽高(归一化后的)。置信度的解码
置信度在输出的85维中占一位,由sigmoid函数计算即可,数值在[0,1]之间。类别解码
COCO数据集由80类,在85维占了80维。使用sigmoid代替了Yolo2中的softmax,每一维独立代表一个类别的置信度,取消了类别之间的互斥,使网络更加灵活.
对网络预测的output特征进行解码,就可以得到预测框的信息
3 损失函数相关设定
3.1 三种预测框
当输入尺寸为320x320时,可得到 ( 8 2 + 1 6 2 + 3 2 2 ) ∗ 3 = 4032 (8^2+16^2+32^2)*3=4032 (82+162+322)∗3=4032个先验框
预测框一共分为三种情况:正样本、负样本、忽略样本
- 正样本:
定义:假设图片中有2个物体的真实框:1. 第一个真实框与4032个先验框计算IOU,最大的先验框为正样本(一个真实框只分配一个先验框)。2. 第二个真实框在4031个先验框中,得到IOU最大的先验框为正样本。 真实框的先后顺序可以忽略。如果该最大IOU小于阈值(论文中0.5),也为正样本。
标签:正样本的检测框loss的标签为ground truth box的 ( x , y , w , h ) (x,y,w,h) (x,y,w,h)编码后的 ( t x , t y , t w , t h ) (t_x,t_y,t_w,t_h) (tx,ty,tw,th)、
类别loss的标签为类别数的one-hot形式。置信度loss的标签为1。- 忽略样本
正样本除外,与任意一个真实框的IOU大于阈值的预测框,为忽略样本,不产生任何loss。- 负样本
正样本除外,与真实框的IOU小于阈值的预测框,为负样本。只产生置信度loss,标签为0。
其实自己在阅读yolo2的时候,就存在疑惑:为什么要有忽略样本的存在,为什么不把正样本以外的预测框全部归为负样本。然后自己强行分析一波
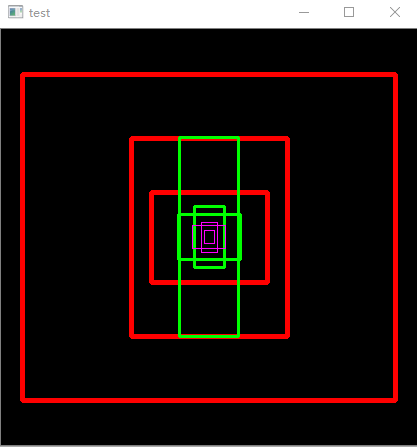
分析:
- 将COCO中的9个先验框的大小画出,如下图。我们可以看到不同先验框之间存在重合检测部分。
如果有一个物体,训练时在“32倍降采样”的特征图中的第三个box,IOU达0.9;在“16倍降采样”的特征图中的第一个box,IOU达0.89。这种情况,IOU为0.89的box学习到的特征,明显与IOU为0.9的box“距离更近”,与IOU小于0.5的box“距离“更远,此时如果将IOU为0.89的框置信度赋为0的标签,与其他IOU小于0.5的box归为同一种情况,网络学习效果便会不理想.
实验:随后补充
3.2 loss的公式
l o s s = l o s s n 1 + l o s s n 2 + l o s s n 3 loss=loss_{n1}+loss_{n2}+loss_{n3} loss=lossn1+lossn2+lossn3 l o s s n 1 = λ n o o b j ∑ i = 0 N 1 ∗ N 1 ∑ j = 0 3 ∗ 1 i j n o o b j ∗ l o g ( 1 − c i j ) loss_{n1}=\lambda_{noobj}\sum_{i=0}^{N_1*N_1}\sum_{j=0}^{3}*1^{noobj}_{ij}*log(1-c_{ij}) lossn1=λnoobji=0∑N1∗N1j=0∑3∗1ijnoobj∗log(1−cij) + λ o b j ∑ i = 0 N 1 ∗ N 1 ∑ j = 0 3 ∗ 1 i j o b j ∗ l o g ( c i j ) +\lambda_{obj}\sum_{i=0}^{N_1*N_1}\sum_{j=0}^{3}*1^{obj}_{ij}*log(c_{ij}) +λobji=0∑N1∗N1j=0∑3∗1ijobj∗log(cij) + λ b o x ∑ i = 0 N 1 ∗ N 1 ∑ j = 0 3 ∗ 1 i j o b j ∗ [ ( t x − t x ′ ) 2 + ( t y − t y ′ ) 2 ] +\lambda_{box}\sum_{i=0}^{N_1*N_1}\sum_{j=0}^{3}*1_{ij}^{obj}*[(t_x-t_x^{'})^{2}+(t_y-t_y^{'})^{2}] +λboxi=0∑N1∗N1j=0∑3∗1ijobj∗[(tx−tx′)2+(ty−ty′)2] + λ b o x ∑ i = 0 N 1 ∗ N 1 ∑ j = 0 3 ∗ 1 i j o b j ∗ [ ( t w − t w ′ ) 2 + ( t h − t h ′ ) 2 ] +\lambda_{box}\sum_{i=0}^{N_1*N_1}\sum_{j=0}^{3}*1_{ij}^{obj}*[(t_w-t_w^{'})^{2}+(t_h-t_h^{'})^{2}] +λboxi=0∑N1∗N1j=0∑3∗1ijobj∗[(tw−tw′)2+(th−th′)2] + λ c l a s s ∑ i = 0 N 1 ∗ N 1 ∑ j = 0 3 ∗ 1 i j o b j ∗ [ p i j ′ ( c ) ∗ l o g ( p i j c ) + ( 1 − p i j ′ ( c ) ) ∗ l o g ( 1 − p i j ( c ) ) ] +\lambda_{class}\sum_{i=0}^{N_1*N_1}\sum_{j=0}^{3}*1_{ij}^{obj}*[p_{ij}^{'}(c)*log(p_{ij}{c})+(1-p_{ij}^{'}(c))*log(1-p_{ij}(c))] +λclassi=0∑N1∗N1j=0∑3∗1ijobj∗[pij′(c)∗log(pijc)+(1−pij′(c))∗log(1−pij(c))]其中 l o s s n 1 loss_{n1} lossn1的计算中
- 第一行:负样本的置信度的loss计算。第二行:正样本的置信度的loss计算。第三四行:正样本的xywh的loss计算。第五行:正样本的的分类loss
- λ \lambda λ:权重系数,控制各loss之间的比例。通常正样本的数量很小于负样本,所以需要系数来调控
- 1 i j o b j 1_{ij}^{obj} 1ijobj若是正样本则为1,否则为0; 1 i j n o o b j 1_{ij}^{noobj} 1ijnoobj若是负样本则为1,否则为0;忽略样本就都为0
- ( x , y , w , h ) (x,y,w,h) (x,y,w,h)的损失使用的是均方差,也可以使用Faster R-CNN中的 smooth L1 损失。smooth L1使训练更平滑。
( c o n f i d e n s e , c l a s s ) (confidense,class) (confidense,class)使用的标签是0,1构成的标签,使用的是交叉熵作为损失函数。
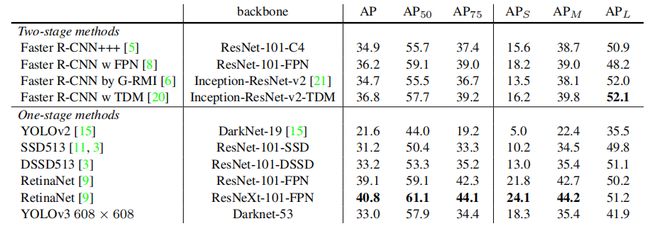
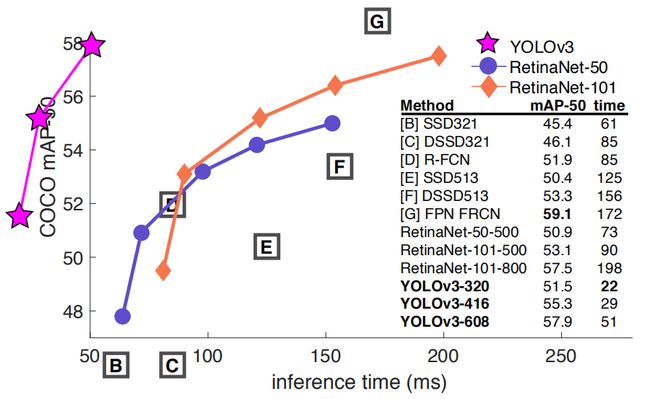
4 实验结果对比
速度上,yolov3最快,比效果最好的模型RetinaNet速度快3倍。
精度上,yolov3逊色于RetinaNet,略低于Faster RCNN,略优于SSD。
当我们关注 m A P 50 mAP_{50} mAP50 时,yolov3更是在时间上和精度上达到了一个很佳的平衡。
5 无效的尝试
- anchor box 坐标的偏移预测:
作者尝试了常规的预测方法,如使用线性激活来将 x , y x,y x,y 的偏移 预测为边界框宽度或高度的倍数,这种操作降低了模型的稳定性且效果不佳- 用线性激活(Linear)预测 ( x , y ) (x,y) (x,y)
而不是逻辑激活(logistic)。效果不佳- 双 IOU 阈值和样本分配:
训练时,Faster RCNN 使用了两个iou阈值。计算预测框和真实框的iou,(0.7,1]为正样本,[0.3,0.7]为忽略样本,[0,0.3)为负样本。yolov3尝试这种方式,效果并不好。待我得空复习下FasterRCNN,再来强行分析。
9个anchorbox的图的实现代码(随便记录下):
import cv2 import numpy as np image = np.zeros((416,416,3)) anchor_box = [(10, 13), (16, 30), (33, 23), (30, 61), (62, 45), (59, 199), (116, 90), (156, 198), (373, 326)] anchor_box = anchor_box[::-1] for i in range(0,9): center = [416/2, 416/2] x = int(center[0]-anchor_box[i][0]/2) y = int(center[1]-anchor_box[i][1]/2) m = int(center[0]+anchor_box[i][0]/2) n = int(center[1]+anchor_box[i][1]/2) cv2.rectangle(image, (x, y), (m, n), (0, 0, 255), 3) if(i in [0,1,2]) else print() cv2.rectangle(image, (x, y), (m, n), (0, 255, 0), 2) if(i in [3,4,5]) else print() cv2.rectangle(image, (x, y), (m, n), (255, 0, 255), 1) if(i in [6,7,8]) else print() cv2.namedWindow("test", 0) cv2.resizeWindow("test",416,416) cv2.imshow("test",image) cv2.waitKey(0) cv2.destroyAllWindows()