Open3D点云库 C++学习笔记
几何篇(四)
文章目录
- 几何篇(四)
- 前言
- 一、K-d树
- 二、八叉树
- 三、参考资料
- 总结
前言
本章节将主要介绍K-d树和八叉树。
一、K-d树
Open3D 使用FLANN构建 KDTrees 以快速检索最近的邻。其搜索方式主要包括两种,一种是根据数量搜索,另一种是根据半径来搜索。
代码如下:
auto new_cloud_ptr = std::make_shared<geometry::PointCloud>();//读入点云数据,并判断是否读入成功
if (io::ReadPointCloud("../data/fragment.ply", *new_cloud_ptr)) {
utility::LogInfo("Successfully read {}", "../data/fragment.ply");
} else {
utility::LogWarning("Failed to read {}", "../data/fragment.ply");
return 1;
}
Eigen::Vector3d color(0.5,0.5,0.5); //把点云设置为灰色
new_cloud_ptr->open3d::geometry::PointCloud::PaintUniformColor(color);//把点云设置为灰色
//最大个数的搜索方法
geometry::KDTreeFlann kdtree;
int num =200; //最近邻个数
kdtree.SetGeometry(*new_cloud_ptr);
std::vector<int> new_indices_vec(num);//最近邻对应的点云索引序号
std::vector<double> new_dists_vec(num);//最近邻离中心点的距离
kdtree.SearchKNN(new_cloud_ptr->points_[1500], num, new_indices_vec, //将第1500个点设置为搜索的中心点
new_dists_vec);
for (size_t i = 0; i < new_indices_vec.size(); i++) {
utility::LogInfo("{:d}, {:f}", (int)new_indices_vec[i],
sqrt(new_dists_vec[i]));
new_cloud_ptr->colors_[new_indices_vec[i]] =
Eigen::Vector3d(1.0, 0.0, 0.0); //最近邻涂成红色
}
new_cloud_ptr->colors_[1500] = Eigen::Vector3d(0.0, 1.0, 0.0); //搜索中心设置为绿色
//最大半径的搜索方法
float r = 0.1; //设置的搜索半径
int k = kdtree.SearchRadius(new_cloud_ptr->points_[4000], r, new_indices_vec,
new_dists_vec);
utility::LogInfo("======== {:d}, {:f} ========", k, r);
for (int i = 0; i < k; i++) {
utility::LogInfo("{:d}, {:f}", (int)new_indices_vec[i],
sqrt(new_dists_vec[i]));
new_cloud_ptr->colors_[new_indices_vec[i]] =
Eigen::Vector3d(0.0, 0.0, 1.0);//最近邻涂成蓝色
}
new_cloud_ptr->colors_[4000] = Eigen::Vector3d(1.0, 0.0, 0.0);//搜索中心设置为红色
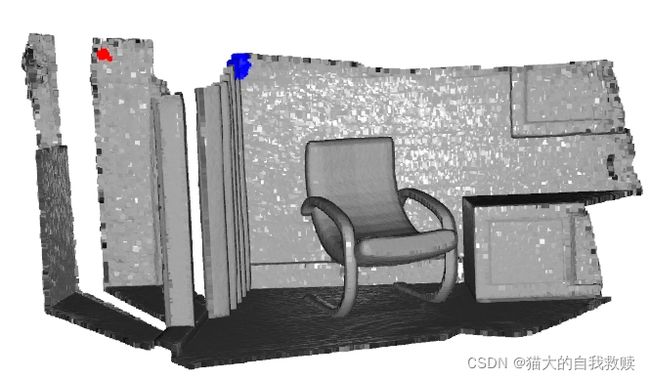
visualization::DrawGeometries({new_cloud_ptr}, "KDTreeFlann", 1600, 900);
结果如下:
二、八叉树
八叉树(Octree)是一种树型数据结构,其中每个内部节点都有八个子节点。八叉树通常用于 3D 点云的空间划分。八叉树的非空叶节点包含一个或多个落入同一空间的细分点。八叉树是 3D 空间的有用描述,可用于快速找到附近的点。Open3D 的Octree可用于创建、搜索和遍历,具有用户指定最大树深度的八叉树的几何类型。关于八叉树的原理部分可参考此篇文章:https://wenku.baidu.com/view/f9553133f28583d049649b6648d7c1c708a10bd4.html
代码如下:
bool f_traverse(const std::shared_ptr<geometry::OctreeNode>& node,
const std::shared_ptr<geometry::OctreeNodeInfo>& node_info) {
if (auto internal_node =
std::dynamic_pointer_cast<geometry::OctreeInternalNode>(node)) {
if (auto internal_point_node = std::dynamic_pointer_cast<
geometry::OctreeInternalPointNode>(internal_node)) {
int num_children = 0;
for (const auto& c : internal_point_node->children_) {
if (c) num_children++;
}
utility::LogInfo(
"Internal node at depth {} with origin {} has "
"{} children and {} points",
node_info->depth_, node_info->origin_, num_children,
internal_point_node->indices_.size());
}
} else if (auto leaf_node = std::dynamic_pointer_cast<
geometry::OctreePointColorLeafNode>(node)) {
utility::LogInfo(
"Node at depth {} with origin {} has"
"color {} and {} points",
node_info->depth_, node_info->origin_, leaf_node->color_,
leaf_node->indices_.size());
// utility::LogInfo("Indices: {}", leaf_node->indices_);
} else {
utility::LogError("Unknown node type");
}
return false;
}
int main(int argc, char *argv[]) {
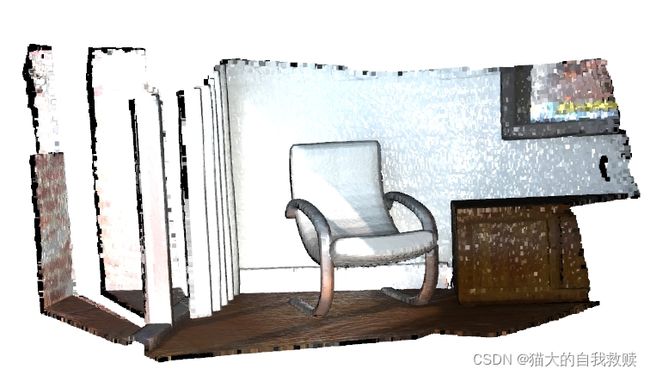
auto pcd = io::CreatePointCloudFromFile("../data/fragment.ply");
visualization::DrawGeometries({pcd},"input");
constexpr int max_depth = 4; //设置最大深度为4
auto octree = std::make_shared<geometry::Octree>(max_depth);
octree->ConvertFromPointCloud(*pcd);
octree->Traverse(f_traverse);
std::cout << std::endl << std::endl;
auto start = std::chrono::steady_clock::now();
auto result = octree->LocateLeafNode(Eigen::Vector3d::Zero());
auto end = std::chrono::steady_clock::now();
utility::LogInfo(
"Located in {} usec",
std::chrono::duration_cast<std::chrono::microseconds>(end - start)
.count());
if (auto point_node =
std::dynamic_pointer_cast<geometry::OctreePointColorLeafNode>(
result.first)) {
utility::LogInfo(
"Found leaf node at depth {} with origin {} and {} indices",
result.second->depth_, result.second->origin_,
point_node->indices_.size());
}
std::cout << std::endl << std::endl;
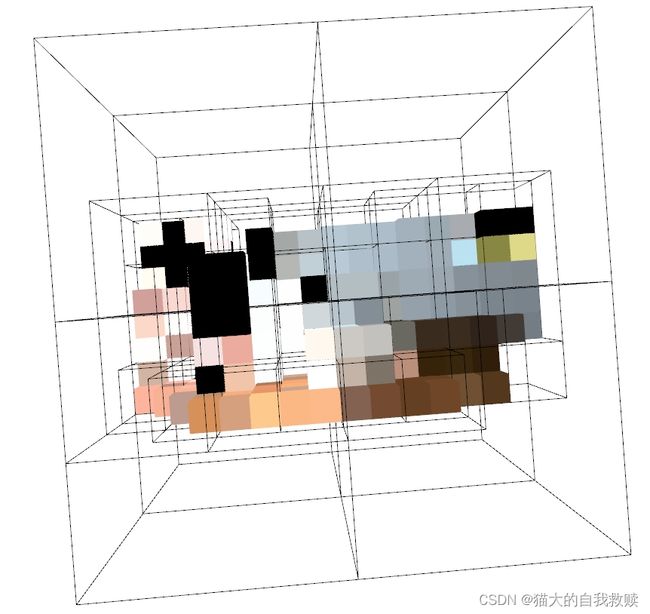
visualization::DrawGeometries({pcd, octree},"octree output");
return 0;
}
输入点云图:
使用八叉数结构对点云图进行储存结果如下:
三、参考资料
http://www.open3d.org/docs/latest/tutorial/geometry/kdtree.html
http://www.open3d.org/docs/latest/tutorial/geometry/octree.html
总结
以上就是几何篇(四)的全部内容,完整的可执行代码可以在我的github仓库进行下载,文章会持续更新,如果文章中有写的不对的地方,希望大家可以在评论区进行批评和指正,大家一起交流,共同进步!