4.梯度下降Gradient Descent
Review: 梯度下降法
在回归问题的第三步中,需要解决下面的最优化问题:
θ∗=arg minθ L(θ)
L:lossfunction(损失函数)
θ:parameters(参数)
这里的parameters是复数,即 θ 指代一堆参数,比如上篇说到的 w 和 b。
我们要找一组参数 θ ,让损失函数越小越好,这个问题可以用梯度下降法解决:
假设 θ 有里面有两个参数 θ1,θ2,随机选取初始值 θ0=[θ01θ02],这里可能某个平台不支持矩阵输入,看下图就好。

然后分别计算初始点处,两个参数对 L 的偏微分,然后 θ0 减掉 η 乘上偏微分的值,得到一组新的参数。同理反复进行这样的计算。黄色部分为简洁的写法,∇L(θ)即为梯度。
η叫做Learning rates(学习速率)
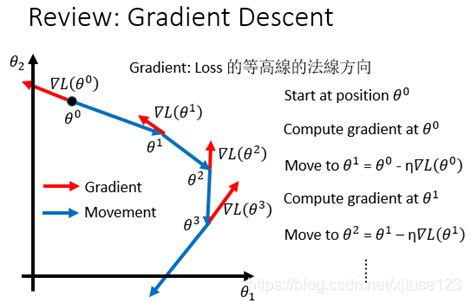
上图举例将梯度下降法的计算过程进行可视化。
梯度下降三个小贴士:
Tip 1 Tuning your learning rates
Tip 2:Stochastic Gradient Descent
Tip 3 : Feature Scaling
Tip1:调整 learning rates(学习速率)
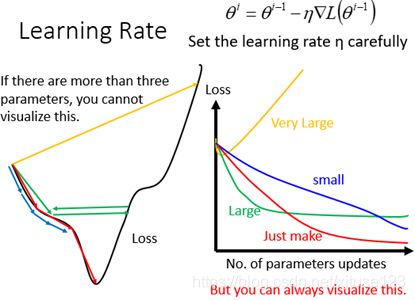
上图左边黑色为损失函数的曲线,假设从左边最高点开始,如果 learning rate 调整的刚刚好,比如红色的线,就能顺利找到最低点。如果 learning rate 调整的太小,比如蓝色的线,就会走的太慢,虽然这种情况给足够多的时间也可以找到最低点,实际情况可能会等不及出结果。如果 learning rate 调整的有点大,比如绿色的线,就会在上面震荡,走不下去,永远无法到达最低点。还有可能非常大,比如黄色的线,直接就飞出去了,update参数的时候只会发现损失函数越更新越大。
虽然这样的可视化可以很直观观察,但可视化也只是能在参数是一维或者二维的时候进行,更高维的情况已经无法可视化了。
解决方法就是上图右边的方案,将参数改变对损失函数的影响进行可视化。比如 learning rate 太小(蓝色的线),损失函数下降的非常慢;learning rate 太大(绿色的线),损失函数下降很快,但马上就卡住不下降了;learning rate特别大(黄色的线),损失函数就飞出去了;红色的就是差不多刚好,可以得到一个好的结果。
自适应 learning rate
举一个简单的思想:随着次数的增加,通过一些因子来减少 learning rate
1.通常刚开始,初始点会距离最低点比较远,所以使用大一点的 learning rate
2.update好几次参数之后呢,比较靠近最低点了,此时减少 learning rate
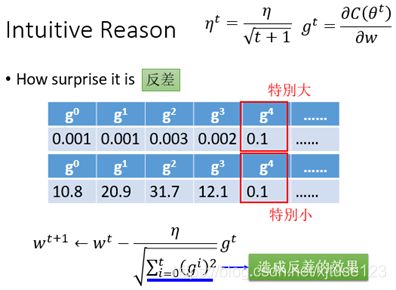
3.比如 ηt=η/(t+1)^(1/2),t 是次数。随着次数的增加,ηt 减小
但 learning rate 不能是 one-size-fits-all ,不同的参数需要不同的 learning rate
Adagrad 算法
Adagrad 是什么?
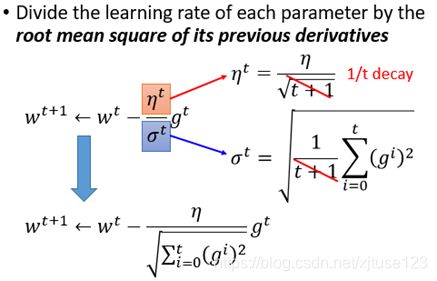
每个参数的学习率都把它除上之前微分的均方根。解释:
普通的梯度下降为:
![]()
Adagrad 可以做的更好:

σt:之前参数的所有微分的均方根,对于每个参数都是不一样的。
Adagrad举例
下图是一个参数的更新过程

将 Adagrad 的式子进行化简:
Adagrad 存在的矛盾?
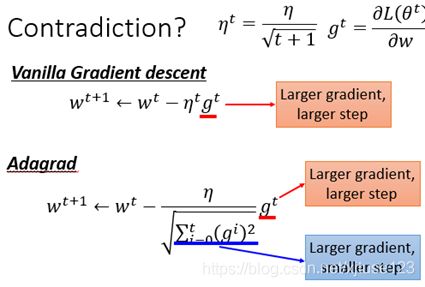
在 Adagrad 中,当梯度越大的时候,步伐应该越大,但下面分母又导致当梯度越大的时候,步伐会越小。
下图是一个直观的解释:
下面给一个正式的解释:

比如初始点在 x0,最低点为 −b/2a,最佳的步伐就是 x0 到最低点之间的距离 |x0+b/2a|,也可以写成 |2ax0+b|/2a。而刚好 |2ax0+b| 就是方程绝对值在x0这一点的微分。
这样可以认为如果算出来的微分越大,则距离最低点越远。而且最好的步伐和微分的大小成正比。所以如果踏出去的步伐和微分成正比,它可能是比较好的。
结论1-1:梯度越大,就跟最低点的距离越远。这个结论在多个参数的时候就不一定成立了。
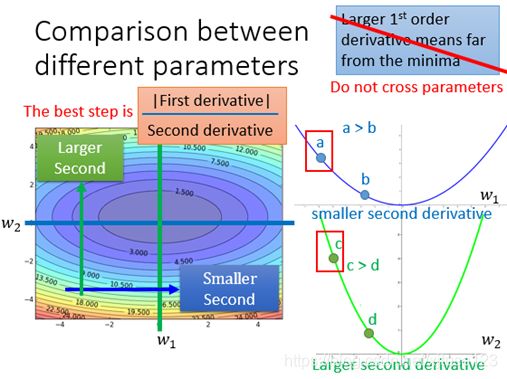
多参数下结论不一定成立,对比不同的参数

上图左边是两个参数的损失函数,颜色代表损失函数的值。如果只考虑参数 w1,就像图中蓝色的线,得到右边上图结果;如果只考虑参数 w2,就像图中绿色的线,得到右边下图的结果。确实对于a和b,结论1-1是成立的,同理c和b也成立。但是如果对比a和c,就不成立了,c比a大,但c距离最低点是比较近的。
所以结论1-1是在没有考虑跨参数对比的情况下,才能成立的。所以还不完善。
之前说到的最佳距离|2ax0+b|/2a,还有个分母 2a 。对function进行二次微分刚好可以得到:
∂2y/∂x2=2a
所以最好的步伐应该是:
一次微分/二次微分
即不止和一次微分成正比,还和二次微分成反比。最好的step应该考虑到二次微分:
Adagrad 进一步的解释
再回到之前的 Adagrad
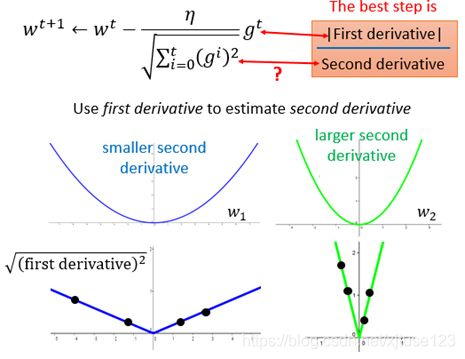
对于∑ti=0(gi)2这一项就是希望再尽可能不增加过多运算的情况下模拟二次微分(说白了这项就是二次微分)。(如果计算二次微分,在实际情况中可能会增加很多的时间消耗)
Tip2:Stochastic Gradient Descent(随机梯度下降法)
之前的梯度下降:

而Stochastic Gradient Descent(更快):
损失函数不需要处理训练集所有的数据,选取一个例子 xn
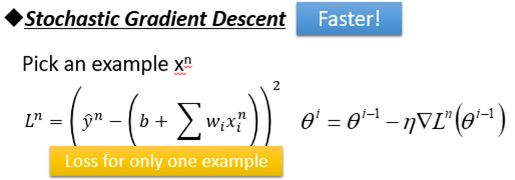
此时不需要像之前那样对所有的数据进行处理,只需要计算某一个例子的损失函数Ln,就可以赶紧update 梯度。
对比:
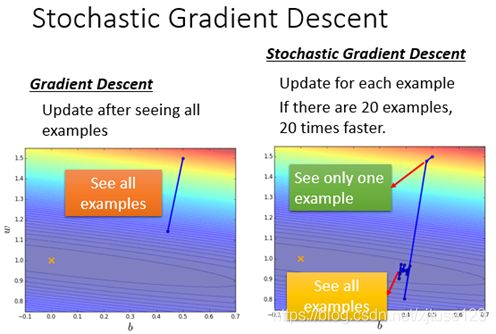
常规梯度下降法走一步要处理到所有20个examples,但Stochastic 此时已经走了20步(每处理一个example就更新)
Tip3:Feature Scaling(特征缩放)
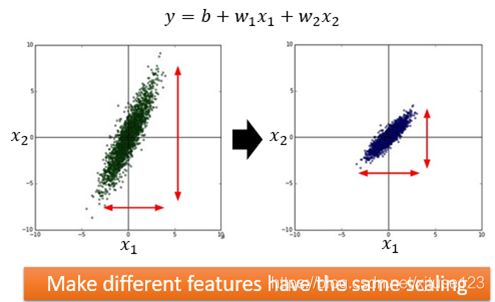
比如有个function:
y=b+w1x1+w2x2
两个输入的分布的范围很不一样,建议把他们的范围缩放,使得不同输入的范围是一样的。
为什么要这样做?
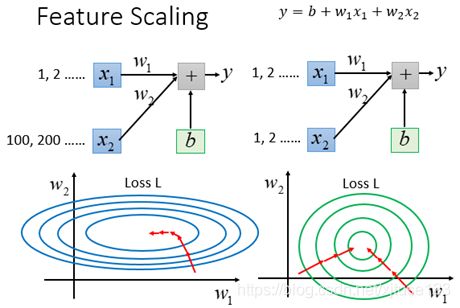
上图左边是x1的scale比 x2要小很多,所以当w1 和 w2做同样的变化时,w1对y的变化影响是比较小的,w2对y的变化影响是比较大的。
坐标系中是两个参数的error surface(现在考虑左边蓝色),因为w1对y的变化影响比较小,所以w1对损失函数的影响比较小,w1对损失函数有比较小的微分,所以w1方向上是比较平滑的。同理w2对y的影响比较大,所以w2对损失函数的影响比较大,所以在w2方向有比较尖的峡谷。
上图右边是两个参数scaling比较接近,右边的绿色图就比较接近圆形。
对于左边的情况,上面讲过这种狭长的情形不过不用Adagrad的话是比较难处理的,两个方向上需要不同的学习率,同一组学习率会搞不定它。而右边情形更新参数就会变得比较容易。左边的梯度下降并不是向着最低点方向走的,而是顺着等高线切线法线方向走的。但绿色就可以向着圆心(最低点)走,这样做参数更新也是比较有效率。
怎么做 scaling?
方法非常多,这里举例一种常见的做法:
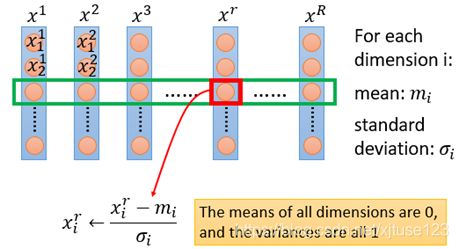
上图每一列都是一个例子,里面都有一组feature。
对每一个维度i(绿色框)都计算平均数,记做mi;还要计算标准差,记做σi。然后用第r个例子中的第i个输入,减掉平均数mi,然后除以标准差σi,得到的结果是所有的维数都是0,所有的方差都是1
梯度下降的理论基础
当用梯度下降解决问题:
θ∗=arg min θL(θ)
每次更新参数 θ,都得到一个新的 θ,它都使得损失函数更小。即:
L(θ0)>L(θ1)>L(θ2)>⋯
上述结论正确吗?
结论是不正确的。。。
数学理论
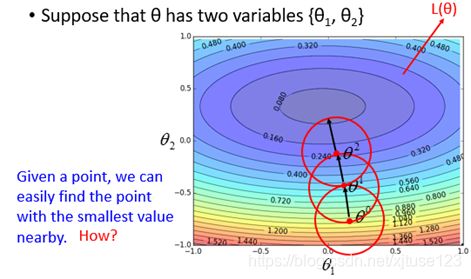
比如在θ0处,可以在一个小范围的圆圈内找到损失函数最小的θ1,不断的这样去寻找。接下来就是如果在小圆圈内快速的找到最小值?
Taylor Series(泰勒展开式)
定义
若h(x)在x=x0点的某个领域内有无限阶导数(即无限可微分,infinitely differentiable),那么在此领域内有:
h(x)=∑k=0∞hk(x0)k!(x−x0)k
=h(x0)+h′(x0)(x−x0)+h′′(x0)2!(x−x0)2+⋯ (1−1)
当x很接近x0时,有h(x)≈h(x0)+h′(x0)(x−x0)
式1-1就是函数h(x)在x=x0点附近关于x的幂函数展开式,也叫泰勒展开式。
图中3条蓝色线是把前3项作图,橙色线是 sin(x)。
多变量泰勒展开式
下面是两个变量的泰勒展开式

利用泰勒展开式简化
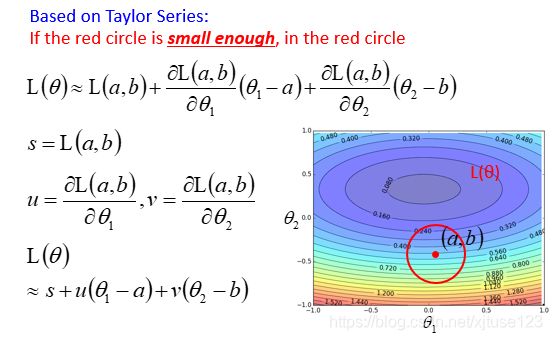
回到之前如何快速在圆圈内找到最小值。基于泰勒展开式,在(a,b) 点的红色圆圈范围内,可以将损失函数用泰勒展开式进行简化:
将问题进而简化为下图:
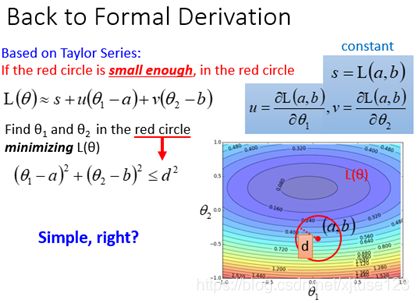
L(θ)最小,则s不需要考虑,可以看出剩下的部分就是两个向量(Δθ1,Δθ2) 和 (u,v)的内积,那怎样让它最小,就是和向量 (u,v) 方向相反的向量。(Δθ1,Δθ2) 就是 (u,v)相反方向乘以一个比例 η(学习率)刚好可以到达红色圆圈边界上。
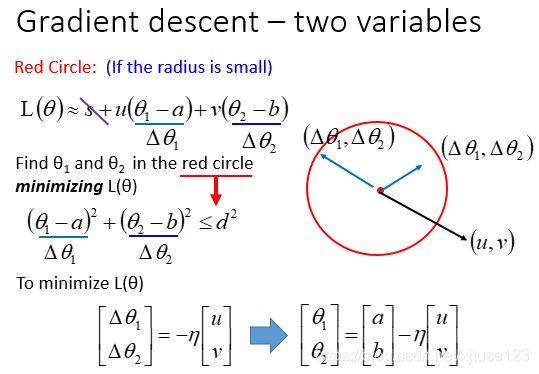
然后将u和v带入。
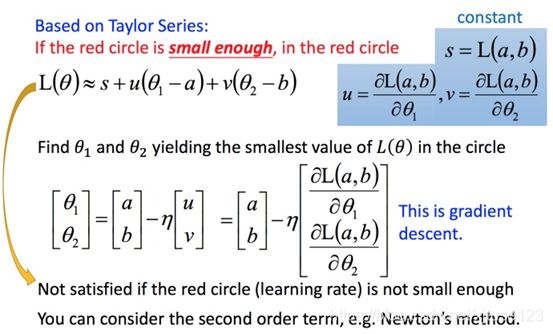
L(θ)≈s+u(θ1−a)+v(θ2−b) (1−2)
发现最后的式子就是梯度下降的式子。但这里用这种方法找到这个式子有个前提,泰勒展开式给的损失函数的估算值是要足够精确的,而这需要红色的圈圈足够小(也就是学习率足够小)来保证。所以理论上每次更新参数都想要损失函数减小的话,即保证式1-2 成立的话,就需要学习率足够足够小才可以。
所以实际中,当更新参数的时候,如果学习率没有设好,是有可能式1-2是不成立的,所以导致做梯度下降的时候,损失函数没有越来越小。
式1-2只考虑了泰勒展开式的一次项,如果考虑到二次项(比如牛顿法),在实际中不是特别好,会涉及到二次微分等,多很多的运算,性价比不好。
梯度下降的限制

- 容易陷入局部极值(local minima)
- 还有可能卡在不是极值,但微分值是0的地方(saddle point)
- 还有可能实际中只是当微分值小于某一个数值就停下来了,但这里只是比较平缓,并不是极值点(plateau)