深度学习经典网络解析(四):DenseNet
深度学习经典网络解析(四):DenseNet
- 1.背景介绍
- 2.DenseNet与ResNet
-
- 2.1ResNet
- 2.2DenseNet
- 3.DenseNet的数学表示
- 4.DenseNet网络架构
-
- 4.1DenseBlock
-
- BottleNeck层
- 4.2Transition层
- 5.DenseNet评价
-
- 5.1DenseNet优点
-
- 5.1.1更强的梯度流动
- 5.1.2减少了参数数量
- 5.1.3保证低维度特征
- 5.2DenseNet不足
- 6.使用Pytorch实现DenseNet
-
- 6.1实现DenseBlock中的内部结构
- 6.2实现DenseBlock模块
- 6.3 实现Transition层:
- 6.4 实现DenseNet网络:
1.背景介绍
DenseNet是CVPR2017年的Best Paper,它脱离了加深网络层数(ResNet)和加宽网络结构(Inception)来提升网络性能的定式思维,从特征的角度考虑,通过特征重用和旁路(Bypass)设置,既大幅度减少了网络的参数量,又在一定程度上缓解了gradient vanishing问题的产生.结合信息流和特征复用的假设,DenseNet当之无愧成为2017年计算机视觉顶会的年度最佳论文。
众所周知,CNN已经成为了深度学习方向最主要的网络结构之一。从一开始的只有五层结构的LeNet, 到后来拥有19层结构的VGG,再到首次跨越100层网络的HighwayNetworks与ResNet, 网络层数的加深成为CNN发展的主要方向之一。
但是随着CNN网络层数的不断增加开始出现梯度消失和模型退化(50层的网络不如20层的网络),批量归一化(BatchNormalization)的广泛使用在一定程度上缓解了梯度消失的问题,而ResNet和Highway Networks通过构造恒等映射设置旁路,进一步减少了梯度消失和模型退化的产生。Fractal Nets通过将不同深度的网络并行化,在获得了深度的同时保证了梯度的传播,随机深度网络通过对网络中一些层进行失活,既证明了ResNet深度的冗余性,又缓解了上述问题的产生。虽然这些不同的网络框架通过不同的实现加深的网络层数,但是他们都包含了相同的核心思想:将feature map进行跨网络层的连接。
用通俗的话说——CNN网络层数越大,输出到输入的路径就会变得更长,就会出现一个问题:梯度经过这么长的路径反向传播回输入的时候很可能就会消失。
那有没有一种方法可以让网络又深梯度又不会消失?
DenseNet提出了一种很简单的方法:将前面所有层与后面的层建立密集连接来对特征进行重用来解决这个问题。
2.DenseNet与ResNet
2.1ResNet
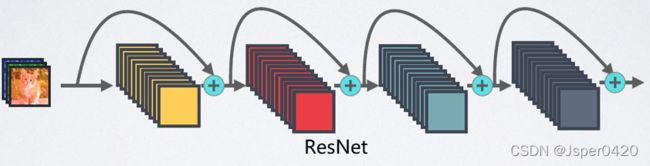
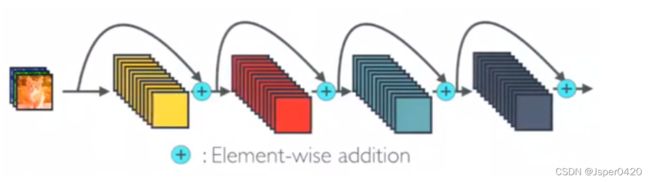
ResNet(Deep Residual Network深度残差网络):通过建立前面层与后面层之间的“短路连接”,这有助于训练过程中梯度的反向传播,从而能训练出更深的CNN网络。
2.2DenseNet
DenseNet采用密集连接机制,即互相连接所有的层,每个层都会与前面所有层在channel维度上连接(concat)在一起,实现特征重用,作为下一层的输入。这样,不但减缓了梯度消失的现象,也使其可以在参数与计算量更少的情况下实现比ResNet更优的性能。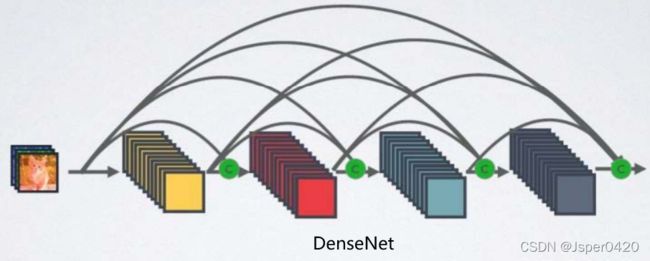
3.DenseNet的数学表示
传统的网络在L层的输出为: x l = H l ( x l − 1 ) x_{l}=H_{l}\left(x_{l-1}\right) xl=Hl(xl−1)

ResNet,增加了来自上一层输入:
x l = H l ( x l − 1 ) + x l − 1 x_{l}=H_{l}\left(x_{l-1}\right)+x_{l-1} xl=Hl(xl−1)+xl−1
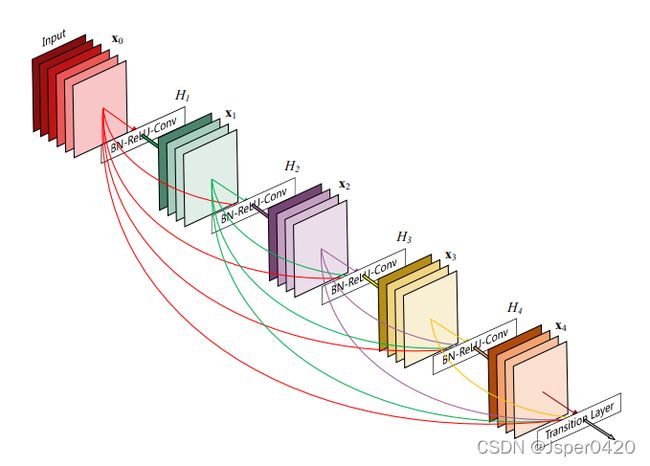
DenseNet中,会连接前面所有层作为输入:
x l = H l ( [ x 0 , x 1 , … , x l − 1 ] ) x_{l}=H_{l}\left(\left[x_{0}, x_{1}, \ldots, x_{l-1}\right]\right) xl=Hl([x0,x1,…,xl−1])
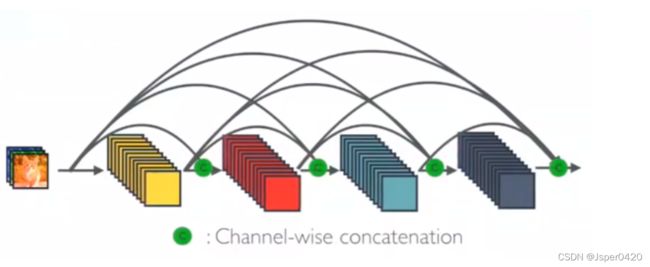
H l ( ⋅ ) \boldsymbol{H}_{l}(\cdot) Hl(⋅) 代表是非线性转化函数,它是一个组合操作,其可能包括一系列的BN(Batch Normalization), ReLU, Pooling及Conv操作。特征传递方式是直接将前面所有层的特征concat后传 到下一层,而不是前面层都要有一个箭头指向后面的所有层.
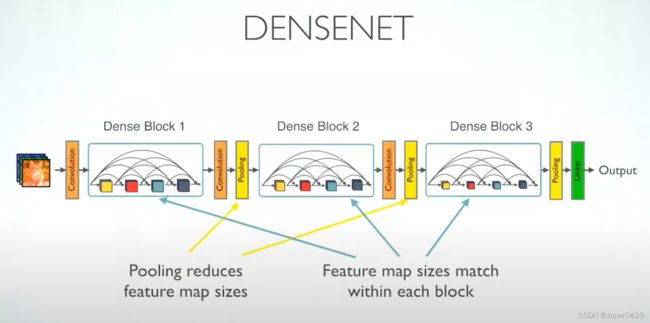
4.DenseNet网络架构
DenseNet的密集连接方式需要特征图大小保持一致 。 所 以 DenseNet 网络中使用DenseBlock+Transition的结构。
DenseBlock是包含很多层的模块,每个层的特征图大小相同,层与层之间采用密集连接方式。
Transition模块是连接两个相邻的DenseBlock,并且通过Pooling使特征图大小降低。

4.1DenseBlock
-
在DenseBlock中,各个层的特征图大小一致,可以在channel维度上连接。DenseBlock中的非线性组合函数采用的是BN+ReLU+3x3Conv的结构。
-
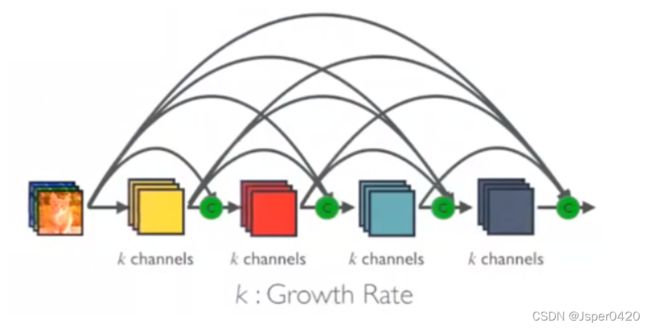
这里有一个参数 k k k, 称为增长率, 指的是每一层的额外通道数, , 假如输入层特征图的channel为 K 0 K_{0} K0, 那么第 L L L 层的channel数就为 K 0 + ( L − 1 ) K K_{0}+(L-1) K K0+(L−1)K。因为每一层都接受前面所有层的特征图,即特征传递方式是直接将前面所有层的特征concat后传到下一层,一般情况下使用较小的K(一般为12),要注意这个K的实际含义就是这层新提取出的特征。
-
Dense Block采用了激活函数在前、卷积层在后的顺序,即BN-ReLU-Conv的顺序,这种方式也被称为pre-activation。通常的模型relu等激活函数处于卷积conv、批归一化batchnorm之后,即Conv-BN-ReLU,也被称为post-activation。作者证明,如果采用post-activation设计,性能会变差。
BottleNeck层
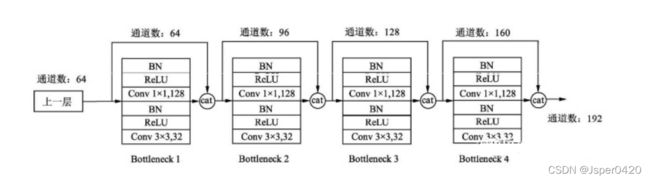
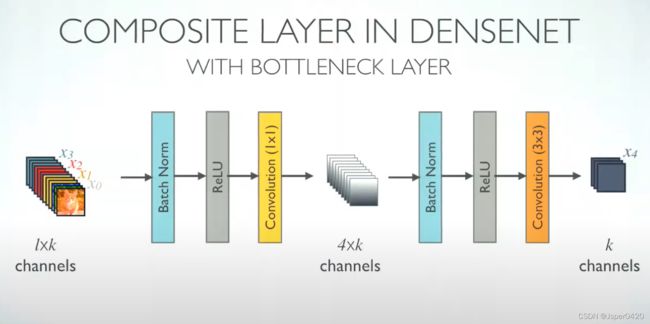
由于后面层的输入会非常大,DenseBlock内部可以采用Bottleneck层(瓶颈层)来减少计算量,主要是原有的结构中增加1x1 Conv,即BN+ReLU+1x1 Conv+BN+ReLU+3x3 Conv称为DenseNet-B结构。其中1x1 Conv得到4k个特征图它起到的作用是降低特征数量,从而提升计算效率。
每一个Bottleneck输入输出的特征通道数是相同的。这里1×1卷积的作用是固定输出通道数,达到降维的作用,1×1卷积输出的通道数通常是GrowthRate的4倍。当几十个Bottleneck相连接时,concat后的通道数会增加到上千,如果不增加1×1的卷积来降维,后续3×3卷积所需的参数量会急剧增加。
假设输入通道数为64,增长率K=32,经过15个Bottleneck,通道数输出为:
如果不使用1×1卷积,第16个Bottleneck层参数量是:
如果使用1×1卷积,第16个Bottleneck层参数量是:
可以看到参数量大大降低。
4.2Transition层
Transition层它主要是连接两个相邻的DenseBlock,并且降低特征图大小。
Transition层包括一个1x1的卷积和2x2的AvgPooling,结构为BN+ReLU+1x1 Conv+2x2 AvgPooling。
Transition层可以起到压缩模型的作用。假定Transition的上接DenseBlock得到的特征图 channels数为 m \mathrm{m} m ,Transition层可以产生 ⌊ θ m ⌋ \lfloor\theta m\rfloor ⌊θm⌋ 个特征(通过卷积层),其中 θ ∈ ( 0 , 1 ] \theta \in(0,1] θ∈(0,1] 是压缩系 数 (compression rate)。当 Θ = 1 \Theta=1 Θ=1 时,特征个数经过Transition层没有变化,即无压缩,而当压缩系数小于1时,这种结构称为DenseNet-C,一般使用 Θ = 0.5 \Theta=0.5 Θ=0.5 。对于使用bottleneck层的 DenseBlock结构和压缩系数小于1的Transition组合结构称为DenseNet-BC。DenseBlock结构和压缩系数小于1的Transition组合结构称为DenseNet-BC。
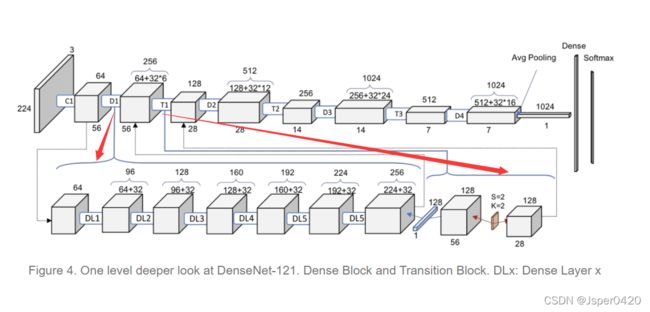
可以通过一张参数计算的图来回顾一下(其中 D x D_{x} Dx 是Dense Block, T x T_{x} Tx 是Transition模块), 我们可以看到每经过一个Dense Block深度增加量=增长率✖密集块数量, 其中+号代表concat。
5.DenseNet评价
5.1DenseNet优点
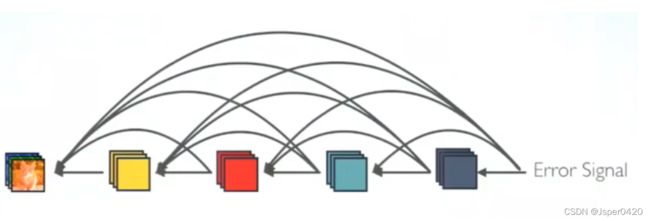
5.1.1更强的梯度流动
由于密集连接方式,DenseNet提升了梯度的反向传播,使得网络更容易训练。由于每层可以直达最后的误差信号,实现了隐式的“deep supervision”。误差信号可以很容易地传播到较早的层,所以较早的层可以从最终分类层获得直接监管(监督)。
减轻了vanishing-gradient(梯度消失) 梯度消失问题在网络深度越深的时候越容易出现,原因就是输入信息和梯度信息在很多层之间传递导致的,而现在这种dense -connection相当于每一层都直接连接input和loss,因此就可以减轻梯度消失现象,这样更深网络不是问题。
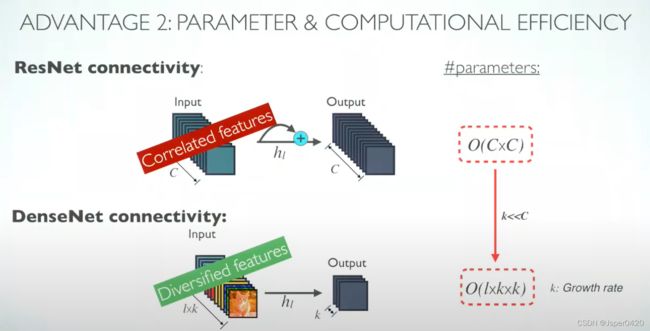
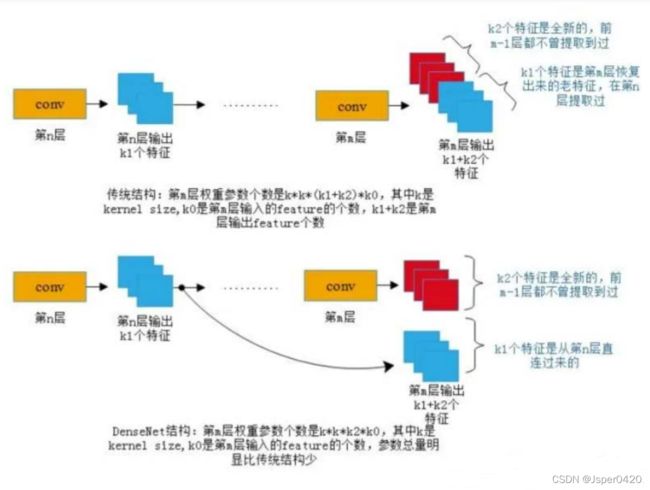
5.1.2减少了参数数量
如下图所示,在ResNet中, 参数量与 C x C C \mathrm{x} C CxC 成正比,而在DenseNet中参数量与 l × k × k l \times k \times k l×k×k 成正比, 因为 k \mathrm{k} k 远小于 C \mathrm{C} C, 所以DenseNet的参数量小很多。
5.1.3保证低维度特征
在标准的卷积网络中,最终输出只会利用提取最高层次的特征。
而在DenseNet中,它使用了不同层次的特征,倾向于给出更平滑的决策边界。这也解释了为什么训练数据不足时DenseNet表现依旧良好。


5.2DenseNet不足
DenseNet的不足在于由于需要进行多次Concatnate操作,数据需要被复制多次,显存容易增加得很快,需要一定的显存优化技术。另外,DenseNet是一种更为特殊的网络,ResNet则相对一般化一些,因此ResNet的应用范围更广泛。
6.使用Pytorch实现DenseNet
6.1实现DenseBlock中的内部结构
这里是BN+ReLU+1x1 Conv+BN+ReLU+3x3Conv结构,最后加入dropout层以用于训练过程。
class _DenseLayer(nn.Sequential):
"""Basic unit of DenseBlock (using bottleneck layer) """
def __init__(self, num_input_features, growth_rate, bn_size, drop_rate):
super(_DenseLayer, self).__init__()
self.add_module("norm1", nn.BatchNorm2d(num_input_features))
self.add_module("relu1", nn.ReLU(inplace=True))
self.add_module("conv1", nn.Conv2d(num_input_features, bn_size*growth_rate,
kernel_size=1, stride=1, bias=False))
self.add_module("norm2", nn.BatchNorm2d(bn_size*growth_rate))
self.add_module("relu2", nn.ReLU(inplace=True))
self.add_module("conv2", nn.Conv2d(bn_size*growth_rate, growth_rate,
kernel_size=3, stride=1, padding=1, bias=False))
self.drop_rate = drop_rate
def forward(self, x):
new_features = super(_DenseLayer, self).forward(x)
if self.drop_rate > 0:
new_features = F.dropout(new_features, p=self.drop_rate, training=self.training)
return torch.cat([x, new_features], 1)
6.2实现DenseBlock模块
class _DenseBlock(nn.Sequential):
"""DenseBlock"""
def __init__(self, num_layers, num_input_features, bn_size, growth_rate, drop_rate):
super(_DenseBlock, self).__init__()
for i in range(num_layers):
layer = _DenseLayer(num_input_features+i*growth_rate, growth_rate, bn_size,
drop_rate)
self.add_module("denselayer%d" % (i+1,), layer)
6.3 实现Transition层:
class _Transition(nn.Sequential):
"""Transition layer between two adjacent DenseBlock"""
def __init__(self, num_input_feature, num_output_features):
super(_Transition, self).__init__()
self.add_module("norm", nn.BatchNorm2d(num_input_feature))
self.add_module("relu", nn.ReLU(inplace=True))
self.add_module("conv", nn.Conv2d(num_input_feature, num_output_features,
kernel_size=1, stride=1, bias=False))
self.add_module("pool", nn.AvgPool2d(2, stride=2))
6.4 实现DenseNet网络:
class DenseNet(nn.Module):
"DenseNet-BC model"
def __init__(self, growth_rate=32, block_config=(6, 12, 24, 16), num_init_features=64,
bn_size=4, compression_rate=0.5, drop_rate=0, num_classes=1000):
""" :param growth_rate: (int) number of filters used in DenseLayer, `k` in the paper :param block_config: (list of 4 ints) number of layers in each DenseBlock :param num_init_features: (int) number of filters in the first Conv2d :param bn_size: (int) the factor using in the bottleneck layer :param compression_rate: (float) the compression rate used in Transition Layer :param drop_rate: (float) the drop rate after each DenseLayer :param num_classes: (int) number of classes for classification """
super(DenseNet, self).__init__()
# first Conv2d
self.features = nn.Sequential(OrderedDict([
("conv0", nn.Conv2d(3, num_init_features, kernel_size=7, stride=2, padding=3, bias=False)),
("norm0", nn.BatchNorm2d(num_init_features)),
("relu0", nn.ReLU(inplace=True)),
("pool0", nn.MaxPool2d(3, stride=2, padding=1))
]))
# DenseBlock
num_features = num_init_features
for i, num_layers in enumerate(block_config):
block = _DenseBlock(num_layers, num_features, bn_size, growth_rate, drop_rate)
self.features.add_module("denseblock%d" % (i + 1), block)
num_features += num_layers*growth_rate
if i != len(block_config) - 1:
transition = _Transition(num_features, int(num_features*compression_rate))
self.features.add_module("transition%d" % (i + 1), transition)
num_features = int(num_features * compression_rate)
# final bn+ReLU
self.features.add_module("norm5", nn.BatchNorm2d(num_features))
self.features.add_module("relu5", nn.ReLU(inplace=True))
# classification layer
self.classifier = nn.Linear(num_features, num_classes)
# params initialization
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.bias, 0)
nn.init.constant_(m.weight, 1)
elif isinstance(m, nn.Linear):
nn.init.constant_(m.bias, 0)
def forward(self, x):
features = self.features(x)
out = F.avg_pool2d(features, 7, stride=1).view(features.size(0), -1)
out = self.classifier(out)
return out