Pytorch机器学习(十)—— 目标检测中k-means聚类方法生成锚框anchor
Pytorch机器学习(十)—— YOLO中k-means聚类方法生成锚框anchor
目录
Pytorch机器学习(十)—— YOLO中k-means聚类方法生成锚框anchor
前言
一、K-means聚类
k-means代码
k-means++算法
二、YOLO中使用k-means聚类生成anchor
读取VOC格式数据集
k-means聚类生成anchor
总结
前言
前面文章说过有关锚框的一些知识,但有个坑一直没填,就是在YOLO中锚框的大小是如何确定出来的。其实在YOLOV3中就有采用k-means聚类方法计算锚框的方法,而在YOLOV5中作者在基于k-means聚类方法的结果之后,采用了遗传算法,进一步得到效果更好的锚框。
如果对锚框概念不理解的,可以看一下这篇文章
Pytorch机器学习(九)—— YOLO中对于锚框,预测框,产生候选区域及对候选区域进行标注详解
一、K-means聚类
在YOLOV3中,锚框大小的计算就是采用的k-means聚类的方法形成的。
从直观的理解,我们知道所有已经标注的bbox的长宽大小,而锚框则是对于预测这些bbox的潜在候选框,所以锚框的长宽形状应该越接近真实bbox越好。而又由于YOLO网络的预测层是包含3种尺度的信息的(分别对应3种感受野),每种尺度的anchor又是三种,所以我们就需要9种尺度的anchor,也即我们需要对所有的bbox的尺寸聚类成9种类别!!
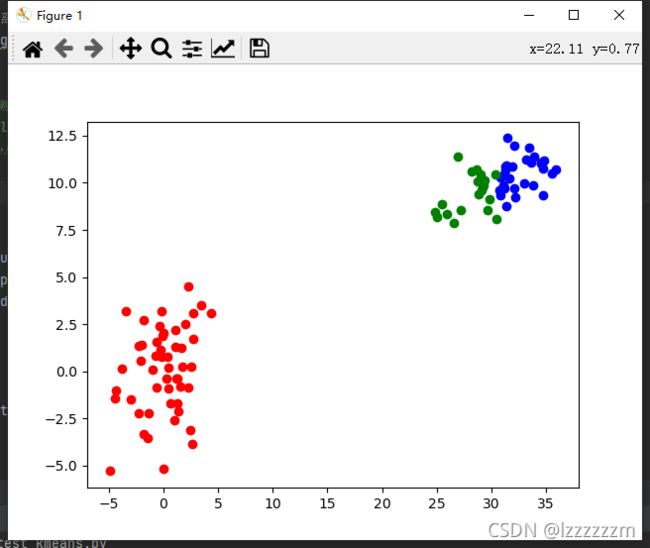
聚类方法比较常用的是使用k-means聚类方法,其算法流程如下。
- 从数据集中随机选取 K 个点作为初始聚类的中心,中心点为

- 针对数据集中每个样本 xi,计算它们到各个聚类中心点的距离,到哪个聚类中心点的距离最小,就将其划分到对应聚类中心的类中
- 针对每个类别 i ,重新计算该类别的聚类中心
 (其中 | ||i| 表示的是该类别数据的总个数)
(其中 | ||i| 表示的是该类别数据的总个数) - 重复第二步和第三步,直到聚类中心的位置不再发生变化(我们也可以设置迭代次数)
k-means代码
# 计算中心点和其他点直接的距离
def calc_distance(obs, guess_central_points):
"""
:param obs: 所有的观测点
:param guess_central_points: 中心点
:return:每个点对应中心点的距离
"""
distances = []
for x, y in obs:
distance = []
for xc, yc in guess_central_points:
distance.append(math.dist((x, y), (xc, yc)))
distances.append(distance)
return distances
def k_means(obs, k, dist=np.median):
"""
:param obs: 待观测点
:param k: 聚类数k
:param dist: 表征聚类中心函数
:return: guess_central_points中心点
current_cluster 分类结果
"""
obs_num = obs.shape[0]
if k < 1:
raise ValueError("Asked for %d clusters." % k)
# 随机取中心点
guess_central_points = obs[np.random.choice(obs_num, size=k, replace=False)] # 初始化最大距离
last_cluster = np.zeros((obs_num, ))
# 当小于一定值时聚类完成
while True:
# 关键是下面的calc_distance,来计算需要的距离
distances = calc_distance(obs, guess_central_points)
# 获得对应距离最小值的索引
current_cluster = np.argmin(distances, axis=1)
# 如果聚类类别没有改变, 则直接退出
if (last_cluster == current_cluster).all():
break
# 计算新的中心
for i in range(k):
guess_central_points[i] = dist(obs[current_cluster == i], axis=0)
last_cluster = current_cluster
return guess_central_points, current_cluster聚类效果如下
k-means++算法
还有一种k-means++算法,是属于k-means算法的衍生吧,其主要解决的是k-means算法第一步,随机选择中心点的问题。
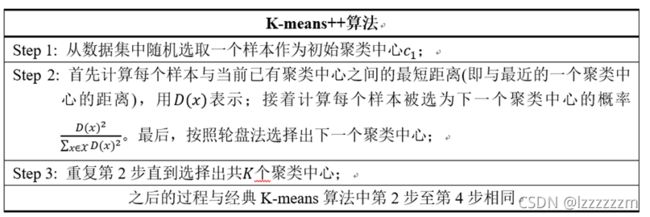
整个代码也十分简单,只需要把最先随机选取中心点用下面代码计算出来就可以。
# k_means++计算中心坐标
def calc_center(boxes):
box_number = boxes.shape[0]
# 随机选取第一个中心点
first_index = np.random.choice(box_number, size=1)
clusters = boxes[first_index]
# 计算每个样本距中心点的距离
dist_note = np.zeros(box_number)
dist_note += np.inf
for i in range(k):
# 如果已经找够了聚类中心,则退出
if i+1 == k:
break
# 计算当前中心点和其他点的距离
for j in range(box_number):
j_dist = single_distance(boxes[j], clusters[i])
if j_dist < dist_note[j]:
dist_note[j] = j_dist
# 转换为概率
dist_p = dist_note / dist_note.sum()
# 使用赌轮盘法选择下一个点
next_index = np.random.choice(box_number, 1, p=dist_p)
next_center = boxes[next_index]
clusters = np.vstack([clusters, next_center])
return clusters但我自己在使用过程中,对于提升不大。主要因为其实bbox的尺度差异一般不会太大,所以这个中心点的选取,对于最后影响不大。
二、YOLO中使用k-means聚类生成anchor
下面重点说一下如何使用这个k-means算法来生成anchor,辅助我们训练,下面的代码和上面的有一点不一样,因为我们上面的代码是基于点的(x,y),而我们聚类中,是bbox的(w,h),下面代码都以VOC格式的训练集为例,如果是coco格式的,得麻烦你自己转一下格式了。
如果不想用我下面的代码但也想用k-means聚类,请读取自己数据集时,读取bbox和图片的(w,h)以列表的形式保存,确保自己n*2或者m*2的列表.
读取VOC格式数据集
我下面的代码,不仅读取了voc格式的数据集,还做了一些数据的统计,如果不想要,自己注释点就好,代码比较简单,也写了注释。
大家可以不用太纠结代码实现,记得改一下自己的图片路径即可。
from xml.dom.minidom import parse
import matplotlib.pyplot as plt
import cv2 as cv
import os
train_annotation_path = '/home/aistudio/data/train/Annotations' # 训练集annotation的路径
train_image_path = '/home/aistudio/data/train/JPEGImages' # 训练集图片的路径
# 展示图片的数目
show_num = 12
#打开xml文档
def parase_xml(xml_path):
"""
输入:xml路径
返回:image_name, width, height, bboxes
"""
domTree = parse(xml_path)
rootNode = domTree.documentElement
# 得到object,sizem,图片名称属性
object_node = rootNode.getElementsByTagName("object")
shape_node = rootNode.getElementsByTagName("size")
image_node = rootNode.getElementsByTagName("filename")
image_name = image_node[0].childNodes[0].data
bboxes = []
# 解析图片的长宽
for size in shape_node:
width = int(size.getElementsByTagName('width')[0].childNodes[0].data)
height = int(size.getElementsByTagName('height')[0].childNodes[0].data)
# 解析图片object属性
for obj in object_node:
# 解析name属性,并统计类别数
class_name = obj.getElementsByTagName("name")[0].childNodes[0].data
# 解析bbox属性,并统计bbox的大小
bndbox = obj.getElementsByTagName("bndbox")
for bbox in bndbox:
x1 = int(bbox.getElementsByTagName('xmin')[0].childNodes[0].data)
y1 = int(bbox.getElementsByTagName('ymin')[0].childNodes[0].data)
x2 = int(bbox.getElementsByTagName('xmax')[0].childNodes[0].data)
y2 = int(bbox.getElementsByTagName('ymax')[0].childNodes[0].data)
bboxes.append([class_name, x1, y1, x2, y2])
return image_name, width, height, bboxes
def read_voc(train_annotation_path, train_image_path, show_num):
"""
train_annotation_path:训练集annotation的路径
train_image_path:训练集图片的路径
show_num:展示图片的大小
"""
# 用于统计图片的长宽
total_width, total_height = 0, 0
# 用于统计图片bbox长宽
bbox_total_width, bbox_total_height, bbox_num = 0, 0, 0
min_bbox_size = 40000
max_bbox_size = 0
# 用于统计聚类所用的图片长宽,bbox长宽
img_wh = []
bbox_wh = []
# 用于统计标签
total_size = []
class_static = {'crazing': 0, 'inclusion': 0, 'patches': 0, 'pitted_surface': 0, 'rolled-in_scale': 0, 'scratches': 0}
num_index = 0
for root, dirs, files in os.walk(train_annotation_path):
for file in files:
num_index += 1
xml_path = os.path.join(root, file)
image_name, width, height, bboxes = parase_xml(xml_path)
image_path = os.path.join(train_image_path, image_name)
img_wh.append([width, height])
total_width += width
total_height += height
# 如果需要展示,则读取图片
if num_index < show_num:
image_path = os.path.join(train_image_path, image_name)
image = cv.imread(image_path)
# 统计有关bbox的信息
wh = []
for bbox in bboxes:
class_name = bbox[0]
class_static[class_name] += 1
x1, y1, x2, y2 = bbox[1], bbox[2], bbox[3], bbox[4]
bbox_width = x2 - x1
bbox_height = y2 - y1
bbox_size = bbox_width*bbox_height
# 统计bbox的最大最小尺寸
if min_bbox_size > bbox_size:
min_bbox_size = bbox_size
if max_bbox_size < bbox_size:
max_bbox_size = bbox_size
total_size.append(bbox_size)
# 统计bbox平均尺寸
bbox_total_width += bbox_width
bbox_total_height += bbox_height
# 用于聚类使用
wh.append([bbox_width / width, bbox_height / height]) # 相对坐标
bbox_num += 1
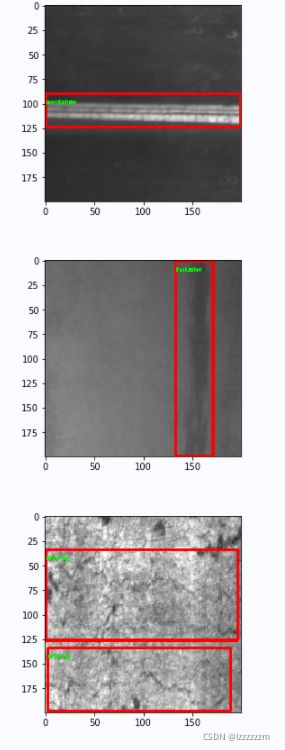
# 如果需要展示,绘制方框
if num_index < show_num:
cv.rectangle(image, (x1, y1), (x2, y2), color=(255, 0, 0), thickness=2)
cv.putText(image, class_name, (x1, y1+10), cv.FONT_HERSHEY_SIMPLEX, fontScale=0.2, color=(0, 255, 0), thickness=1)
bbox_wh.append(wh)
# 如果需要展示
if num_index < show_num:
plt.figure()
plt.imshow(image)
plt.show()
# 去除2个检查文件
# num_index -= 2
print("total train num is: {}".format(num_index))
print("avg total_width is {}, avg total_height is {}".format((total_width / num_index), (total_height / num_index)))
print("avg bbox width is {}, avg bbox height is {} ".format((bbox_total_width / bbox_num), (bbox_total_height / bbox_num)))
print("min bbox size is {}, max bbox size is {}".format(min_bbox_size, max_bbox_size))
print("class_static show below:", class_static)
return img_wh, bbox_wh
img_wh, bbox_wh = read_voc(train_annotation_path, train_image_path, show_num) k-means聚类生成anchor
我这里的k-means代码集合了k-means++的实现,也集合了 太阳花的小绿豆这位博主提出用IOU作为评价指标来计算k-means而不是用欧拉距离的方法可以测试发现,使用IOU确实效果要比使用欧拉距离做为评价指标要好)
import numpy as np
# 这里IOU的概念更像是只是考虑anchor的长宽
def wh_iou(wh1, wh2):
# Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
wh1 = wh1[:, None] # [N,1,2]
wh2 = wh2[None] # [1,M,2]
inter = np.minimum(wh1, wh2).prod(2) # [N,M]
return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)
# 计算单独一个点和一个中心的距离
def single_distance(center, point):
center_x, center_y = center[0]/2 , center[1]/2
point_x, point_y = point[0]/2, point[1]/2
return np.sqrt((center_x - point_x)**2 + (center_y - point_y)**2)
# 计算中心点和其他点直接的距离
def calc_distance(boxes, clusters):
"""
:param obs: 所有的观测点
:param clusters: 中心点
:return:每个点对应中心点的距离
"""
distances = []
for box in boxes:
# center_x, center_y = x/2, y/2
distance = []
for center in clusters:
# center_xc, cneter_yc = xc/2, yc/2
distance.append(single_distance(box, center))
distances.append(distance)
return distances
# k_means++计算中心坐标
def calc_center(boxes, k):
box_number = boxes.shape[0]
# 随机选取第一个中心点
first_index = np.random.choice(box_number, size=1)
clusters = boxes[first_index]
# 计算每个样本距中心点的距离
dist_note = np.zeros(box_number)
dist_note += np.inf
for i in range(k):
# 如果已经找够了聚类中心,则退出
if i+1 == k:
break
# 计算当前中心点和其他点的距离
for j in range(box_number):
j_dist = single_distance(boxes[j], clusters[i])
if j_dist < dist_note[j]:
dist_note[j] = j_dist
# 转换为概率
dist_p = dist_note / dist_note.sum()
# 使用赌轮盘法选择下一个点
next_index = np.random.choice(box_number, 1, p=dist_p)
next_center = boxes[next_index]
clusters = np.vstack([clusters, next_center])
return clusters
# k-means聚类,且评价指标采用IOU
def k_means(boxes, k, dist=np.median, use_iou=True, use_pp=False):
"""
yolo k-means methods
Args:
boxes: 需要聚类的bboxes,bboxes为n*2包含w,h
k: 簇数(聚成几类)
dist: 更新簇坐标的方法(默认使用中位数,比均值效果略好)
use_iou:是否使用IOU做为计算
use_pp:是否是同k-means++算法
"""
box_number = boxes.shape[0]
last_nearest = np.zeros((box_number,))
# 在所有的bboxes中随机挑选k个作为簇的中心
if not use_pp:
clusters = boxes[np.random.choice(box_number, k, replace=False)]
# k_means++计算初始值
else:
clusters = calc_center(boxes, k)
# print(clusters)
while True:
# 计算每个bboxes离每个簇的距离 1-IOU(bboxes, anchors)
if use_iou:
distances = 1 - wh_iou(boxes, clusters)
else:
distances = calc_distance(boxes, clusters)
# 计算每个bboxes距离最近的簇中心
current_nearest = np.argmin(distances, axis=1)
# 每个簇中元素不在发生变化说明以及聚类完毕
if (last_nearest == current_nearest).all():
break # clusters won't change
for cluster in range(k):
# 根据每个簇中的bboxes重新计算簇中心
clusters[cluster] = dist(boxes[current_nearest == cluster], axis=0)
last_nearest = current_nearest
return clusters使用我下面的auot_anchor代码注意!!(这里代码也是借鉴的太阳花的小绿豆博主的,他把里面的torch函数改为np函数后,使得代码移植性变强了!)
传入的参数中img_wh和bbox_wh即读取voc数据集中图片的长宽和bbox的长宽,为n*2和m*2的列表 !!
这里我还加入了YOLOV5中的遗传算法,具体细节就不展开了。
from tqdm import tqdm
import random
# 计算聚类和遗传算法出来的anchor和真实bbox之间的重合程度
def anchor_fitness(k: np.ndarray, wh: np.ndarray, thr: float): # mutation fitness
"""
输入:k:聚类完后的结果,且排列为升序
wh:包含bbox中w,h的集合,且转换为绝对坐标
thr:bbox中和k聚类的框重合阈值
"""
r = wh[:, None] / k[None]
x = np.minimum(r, 1. / r).min(2) # ratio metric
best = x.max(1)
f = (best * (best > thr).astype(np.float32)).mean() # fitness
bpr = (best > thr).astype(np.float32).mean() # best possible recall
return f, bpr
def auto_anchor(img_size, n, thr, gen, img_wh, bbox_wh):
"""
输入:img_size:图片缩放的大小
n:聚类数
thr:fitness的阈值
gen:遗传算法迭代次数
img_wh:图片的长宽集合
bbox_wh:bbox的长框集合
"""
# 最大边缩放到img_size
img_wh = np.array(img_wh, dtype=np.float32)
shapes = (img_size * img_wh / img_wh).max(1, keepdims=True)
wh0 = np.concatenate([l * s for s, l in zip(shapes, bbox_wh)]) # wh
i = (wh0 < 3.0).any(1).sum()
if i:
print(f'WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
wh = wh0[(wh0 >= 2.0).any(1)] # 只保留wh都大于等于2个像素的box
# k_means 聚类计算anchor
k = k_means(wh, n, use_iou=True, use_pp=False)
k = k[np.argsort(k.prod(1))] # sort small to large
f, bpr = anchor_fitness(k, wh, thr)
print("kmeans: " + " ".join([f"[{int(i[0])}, {int(i[1])}]" for i in k]))
print(f"fitness: {f:.5f}, best possible recall: {bpr:.5f}")
# YOLOV5改进遗传算法
npr = np.random
f, sh, mp, s = anchor_fitness(k, wh, thr)[0], k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
pbar = tqdm(range(gen), desc=f'Evolving anchors with Genetic Algorithm:') # progress bar
for _ in pbar:
v = np.ones(sh)
while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
kg = (k.copy() * v).clip(min=2.0)
fg, bpr = anchor_fitness(kg, wh, thr)
if fg > f:
f, k = fg, kg.copy()
pbar.desc = f'Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
# 按面积排序
k = k[np.argsort(k.prod(1))] # sort small to large
print("genetic: " + " ".join([f"[{int(i[0])}, {int(i[1])}]" for i in k]))
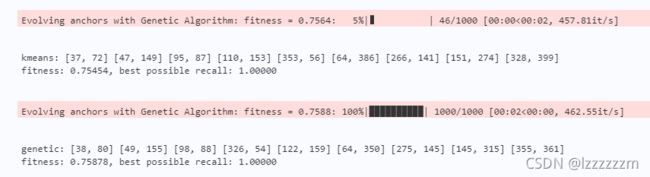
print(f"fitness: {f:.5f}, best possible recall: {bpr:.5f}")
auto_anchor(img_size=416, n=9, thr=0.25, gen=1000, img_wh=img_wh, bbox_wh=bbox_wh)如果有兴趣代码细节的,可以看里面的注释,如果还有不懂的,可以私信我交流。
最后计算出来的结果如下,可以看到计算出来的anchor的是长方型的,这是因为我的bbox中长方型的anchor居多,符合我的预期。我们只需要把下面的anchor,替换掉默认的anchor即可!

最后说明一下,用聚类算法算出来的anchor并不一定比初始值即coco上的anchor要好,原因是目标检测大部分基于迁移学习,backbone网络的训练参数是基于coco上的anchor学习的,所以其实大部分情况用这个聚类效果并没有直接使用coco上的好!!,而且聚类效果跟数据集的数量有很大关系,一两千张图片,聚类出来效果可能不会很好
总结
整个算法思路其实不难,但代码有一些冗余和长,主要也是结合自己在学习和使用过程中,发现很多博主没有说明白如何使用这些代码。