pytorch 深度学习实践 第11讲 卷积神经网络高级篇 CNN
第11讲 卷积神经网络高级篇 Advanced CNN
pytorch学习视频——B站视频链接:《PyTorch深度学习实践》完结合集_哔哩哔哩_bilibili
以下是视频内容笔记以及源码,笔记纯属个人理解,如有错误欢迎路过的大佬指出 。
1. GoogleNet
网络结构如图所示,

GoogleNet,常被用作基础主干网络,图中红色圈出的一个部分称为Inception块。
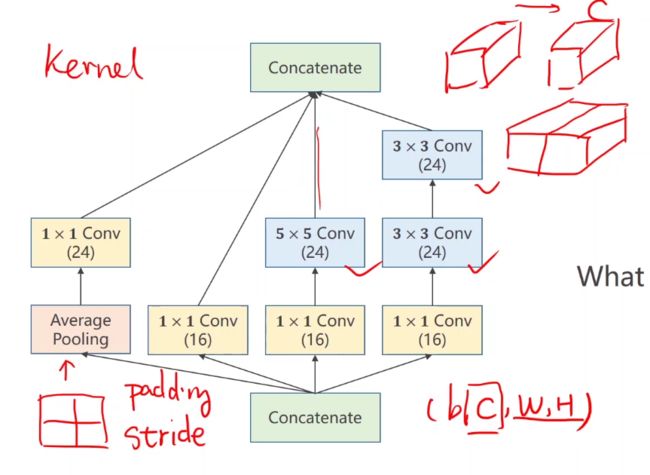
2. Inception Module解析
不知道选取什么kernel,将卷积核都使用一遍,对效果比较好的卷积核赋予更高的权重,将各个卷积核得到的结果拼接起来。
-
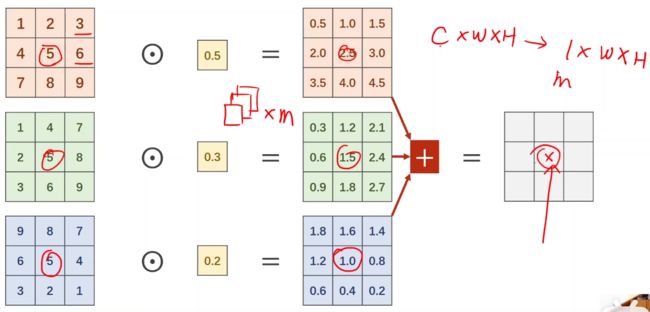
1 × 1卷积核解析
可以看成是在做信息融合,最终得到的特征图的一个像素值融合了前面三个通道的值。
信息融合最简单的例子——考试对各科分数求总分进行比较分数高低,在多个维度下不太好比较。
此处就是在做一个通道的变换,原通道数为3,新的通道数是卷积核的个数,高度和宽度不变。
-
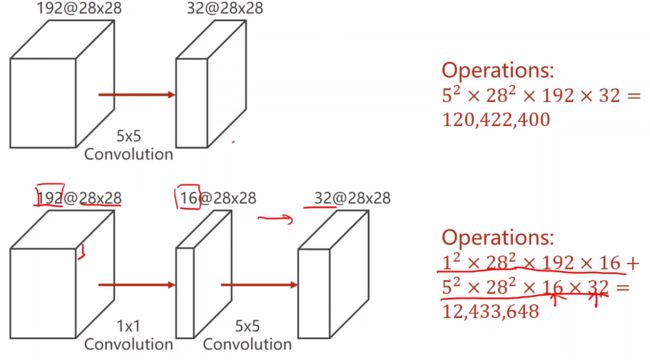
作用
可以用来减少计算量,如图所示:
如果直接对原图像做卷积,计算量很大,如果先用1×1的卷积核做卷积减少通道数,再用卷积核进行操作,可以减少很多计算量,如图所示加上1×1的卷积层后,计算量是原来的1/10。
-
3. Inception Module的实现
如图所示的Inception块的4个分支
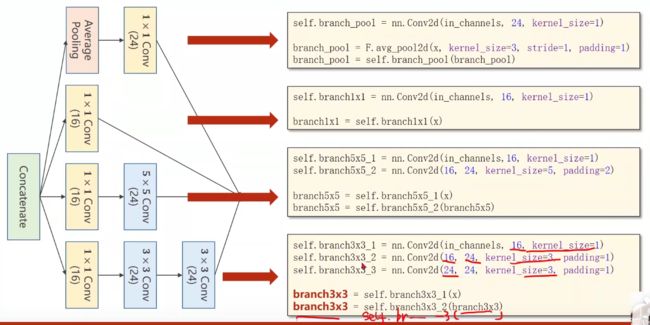
实现——advanced_cnn.py
import torch
from torch import nn
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
import matplotlib.pyplot as plt
batch_size = 64
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307, ), (0.3081, ))
])
train_dataset = datasets.MNIST(root='../dataset/mnist',
train=True,
download=True,
# 指定数据用transform来处理
transform=transform)
train_loader = DataLoader(dataset=train_dataset,
batch_size=batch_size,
shuffle=True)
test_dataset = datasets.MNIST(root='../dataset/mnist',
train=False,
download=True,
transform=transform)
test_loader = DataLoader(dataset=test_dataset,
batch_size=batch_size,
shuffle=False)
# 定义一个Inception类,在网络里会用到
class InceptionA(nn.Module):
def __init__(self, in_channels):
super(InceptionA, self).__init__()
self.branch1X1 = nn.Conv2d(in_channels, 16, kernel_size=1)
# 设置padding保证各个分支输出的高度和宽度保持不变
self.branch5X5_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch5X5_2 = nn.Conv2d(16, 24, kernel_size=5, padding=2)
self.branch3X3_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch3X3_2 = nn.Conv2d(16, 24, kernel_size=3, padding=1)
self.branch3X3_3 = nn.Conv2d(24, 24, kernel_size=3, padding=1)
self.branch_pool = nn.Conv2d(in_channels, 24, kernel_size=1)
def forward(self, x):
branch1X1 = self.branch1X1(x)
branch5X5 = self.branch5X5_1(x)
branch5X5 = self.branch5X5_2(branch5X5)
branch3X3 = self.branch3X3_1(x)
branch3X3 = self.branch3X3_2(branch3X3)
branch3X3 = self.branch3X3_3(branch3X3)
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1X1, branch5X5, branch3X3, branch_pool]
# (b, c, w, h),dim=1——以第一个维度channel来拼接
return torch.cat(outputs, dim=1)
# 定义模型
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 10, kernel_size=5)
self.conv2 = nn.Conv2d(88, 20, kernel_size=5)
self.incep1 = InceptionA(in_channels=10)
self.incep2 = InceptionA(in_channels=20)
self.mp = nn.MaxPool2d(2)
self.fc = nn.Linear(1408, 10)
def forward(self, x):
in_size = x.size(0)
x = F.relu(self.mp(self.conv1(x)))
x = self.incep1(x)
x = F.relu(self.mp(self.conv2(x)))
x = self.incep2(x)
x = x.view(in_size, -1)
x = self.fc(x)
return x
model = Net()
# 将模型迁移到GPU上运行,cuda:0表示第0块显卡
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(torch.cuda.is_available())
model.to(device)
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.5)
# 将训练和测试过程分别封装在两个函数当中
def train(epoch):
running_loss = 0
for batch_idx, data in enumerate(train_loader, 0):
inputs, target = data
# 将要计算的张量也迁移到GPU上——输入和输出
inputs, target = inputs.to(device), target.to(device)
optimizer.zero_grad()
# 前馈 反馈 更新
outputs = model(inputs)
loss = criterion(outputs, target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299:
print('[%d, %5d] loss: %.3f' % (epoch + 1, batch_idx + 1, running_loss / 300))
running_loss = 0
accuracy = []
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images, labels = data
# 测试中的张量也迁移到GPU上
images, labels = images.to(device), labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy on test set: %d %%' % (100 * correct / total))
accuracy.append(100 * correct / total)
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
test()
print(accuracy)
plt.plot(range(10), accuracy)
plt.xlabel("epoch")
plt.ylabel("Accuracy")
plt.show()
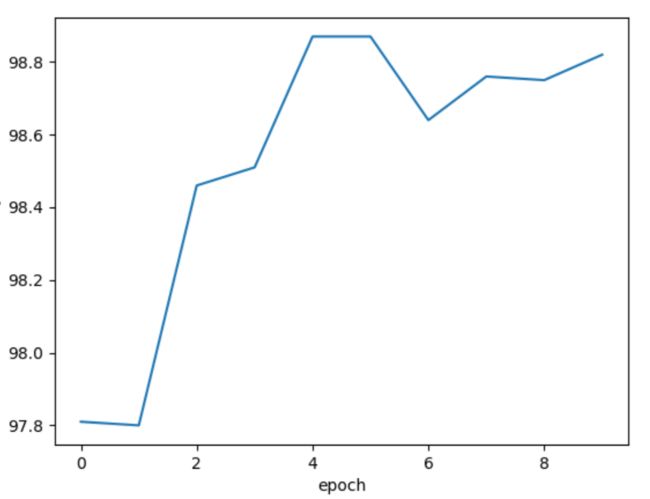
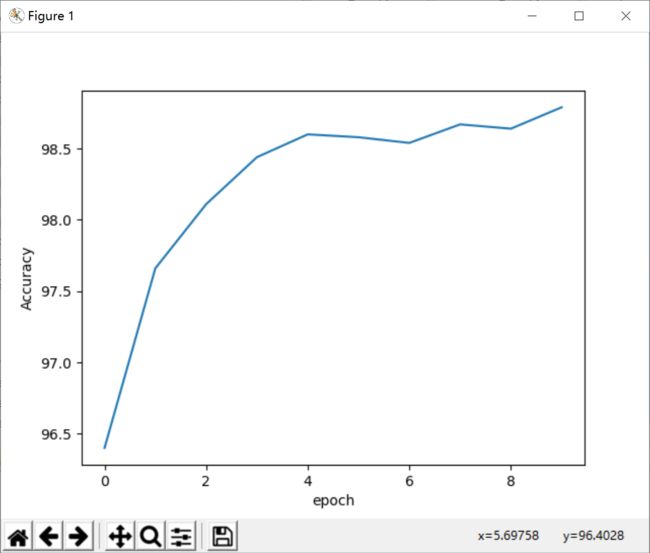
结果:
4. 残差网络
普通网络与残差网络的区别,残差网络在做完卷积激活之前,将该层的输入加上输出一起作为整个的输出来激活。
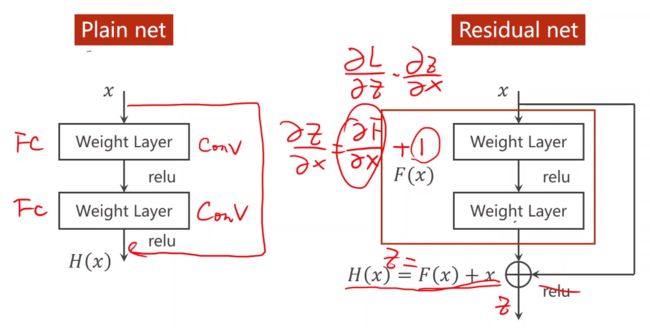
定义:

实现——residual.py
import torch
from torch import nn
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.optim as optim
import matplotlib.pyplot as plt
batch_size = 64
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307, ), (0.3081, ))
])
train_dataset = datasets.MNIST(root='../dataset/mnist',
train=True,
download=True,
# 指定数据用transform来处理
transform=transform)
train_loader = DataLoader(dataset=train_dataset,
batch_size=batch_size,
shuffle=True)
test_dataset = datasets.MNIST(root='../dataset/mnist',
train=False,
download=True,
transform=transform)
test_loader = DataLoader(dataset=test_dataset,
batch_size=batch_size,
shuffle=False)
# 定义一个残差模块类
class ResidualBlock(nn.Module):
def __init__(self, channels):
super(ResidualBlock, self).__init__()
self.channels = channels
self.conv1 = nn.Conv2d(channels, channels, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(channels, channels, kernel_size=3, padding=1)
def forward(self, x):
y = F.relu(self.conv1(x))
y = self.conv2(y)
return F.relu(x + y)
# 定义模型
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1,16, kernel_size=5)
self.conv2 = nn.Conv2d(16, 32, kernel_size=5)
self.mp = nn.MaxPool2d(2)
self.rblock1 = ResidualBlock(16)
self.rblock2 = ResidualBlock(32)
self.fc = nn.Linear(512, 10)
def forward(self, x):
in_size = x.size(0)
x = self.mp(F.relu(self.conv1(x)))
x = self.rblock1(x)
x = self.mp(F.relu(self.conv2(x)))
x = self.rblock2(x)
x = x.view(in_size, -1)
x = self.fc(x)
return x
model = Net()
# 将模型迁移到GPU上运行,cuda:0表示第0块显卡
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(torch.cuda.is_available())
model.to(device)
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.5)
# 将训练和测试过程分别封装在两个函数当中
def train(epoch):
running_loss = 0
for batch_idx, data in enumerate(train_loader, 0):
inputs, target = data
# 将要计算的张量也迁移到GPU上——输入和输出
inputs, target = inputs.to(device), target.to(device)
optimizer.zero_grad()
# 前馈 反馈 更新
outputs = model(inputs)
loss = criterion(outputs, target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299:
print('[%d, %5d] loss: %.3f' % (epoch + 1, batch_idx + 1, running_loss / 300))
running_loss = 0
accuracy = []
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
images, labels = data
# 测试中的张量也迁移到GPU上
images, labels = images.to(device), labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, dim=1)
total += labels.size(0)
# ??怎么比较的相等
# print(predicted)
# print(labels)
# print('predicted == labels', predicted == labels)
# 两个张量比较,得出的是其中相等的元素的个数(即一个批次中预测正确的个数)
correct += (predicted == labels).sum().item()
# print('correct______', correct)
print('Accuracy on test set: %d %%' % (100 * correct / total))
accuracy.append(100 * correct / total)
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
test()
print(accuracy)
plt.plot(range(10), accuracy)
plt.xlabel("epoch")
plt.ylabel("Accuracy")
plt.show()
结果: