【Apollo 6.0算法解析】Apollo EM Planner
文章目录
- 前言
- 一、SL 和 ST 坐标系
-
- 1.1 SL坐标系
- 1.2 ST坐标系
- 二、DP Path(E-Step)
-
- 2.1 Lattice采样
- 2.2 代价函数
-
- 2.2.1 光滑程度
- 2.2.2 障碍物的代价
- 2.2.3 车道代价
- 3.1 动态规划
- 三、Spline Path(M-Step)
-
- 3.1 代价函数
- 3.2 约束条件
-
- 3.2.1 boundary constraints
- 3.2.2 dynamic feasibility
- 四、DP Speed Optimizer(E-Step)
-
- 4.1 ST图
- 4.2 代价函数
- 4.3 动态规划搜索
- 五、Spline QP Speed Optimizer(M-Step)
-
- 5.1 代价函数
- 5.2 约束
- 参考
前言
EM Planner是基于轻决策的规划算法。与其他基于重决策的算法相比,EM Planner的优势在于能够处理许多复杂的场景(例如多障碍物的场景)。当基于重决策的方法试图预先确定如何处理每个障碍物时,困难是显而易见的:(1)很难理解和预测障碍物如何与主车相互作用,因此它们的跟随运动难以描述,因此很难被任何规则考虑;(2)当多个障碍物阻塞道路时,无法找到满足所有预定决策的轨迹概率大大降低,从而导致规划的失败。
Planning的大概流程是这样:先由 Routing模块通过全局规划得到参考线 Reference Line,然后 Planning模块在此基础上进行局部轨迹规划,EM Planner将路径和速度进行分层规划,并在 SL 和 ST坐标系下,使用动态规划(DP)进行路径和速度的决策和粗规划,然后再使用二次规划(QP)进行平滑处理。
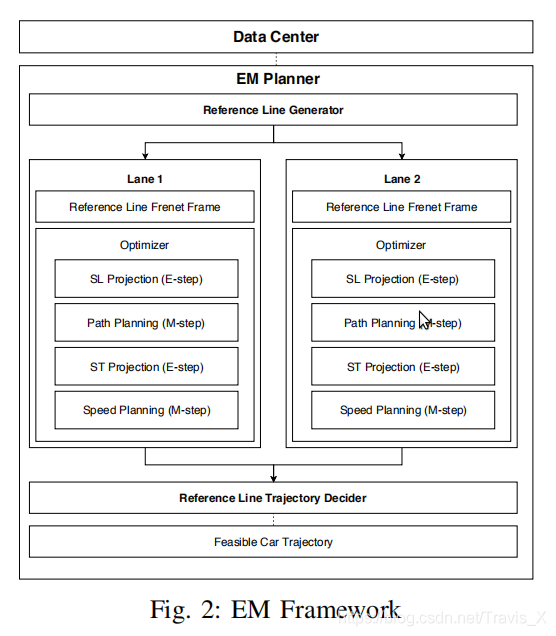
在第一个E-steps中,动态和静态障碍物都被投影到Frenet框架。静态障碍物会直接从笛卡尔坐标系转换到Frenet坐标系,而动态障碍物的信息则以其运动轨迹来描述。在Apollo框架中,可以预测动态障碍物的移动轨迹。考虑到之前的周期规划轨迹,我们可以在每个时间点估计出动态障碍物和汽车的位置。然后动态障碍物和汽车在某个时间点的重叠可以被映射到Frenet框架中。另外,动态障碍物的出现会最终导致自车做出避让的决策。因此,出于安全考虑,SL投影只考虑低速和来向障碍物,而对于高速的动态障碍物,EM Planner的平行变道策略会考虑这种情景。
在第二个E-steps中,基于生成的路径在s-t坐标系下,所有障碍物包括高速、低速和即将到来的障碍物都将被估计,生成速度曲线。如果障碍物轨迹和已经规划的路径重叠,将在s-t坐标系下对应区域将会在进行重新生成。
在两个M-steps中,通过动态规划和二次规划生成路径和速度曲线。尽管我们将障碍物投影到SL和ST坐标系下,但是最优的路径和速度解仍在非凸空间中。因此,我们使用动态规划先获得一个粗略解,同时,这个解可以提供避让、减速、超车等障碍决策。通过这个粗略的解,可以构建一个凸包,然后使用基于二次规划的样条优化器来求解。
一、SL 和 ST 坐标系
1.1 SL坐标系
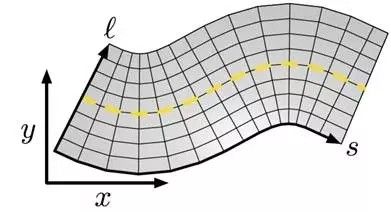
SL坐标系又称为Frenet坐标系,S代表中心线方向,L代表与中心线正交的方向,在SL坐标系中,我们用S、L、侧向速度dL、侧向加速度ddL、侧向加加速度dddL,这5个量描述车辆的状态。
在Frenet坐标系下做运动规划的好处在于借助于指引线做运动分解,将高维度的规划问题,转换成了多个低维度的规划问题,极大的降低了规划的难度。另外一个好处在于方便理解场景,无论道路在地图坐标系下的形状与否,我们都能够很好的理解道路上物体的运动关系。相较直接使用地图坐标系下的坐标做分析,使用Frenet坐标,能够直观的体现道路上不同物体的运动关系。
1.2 ST坐标系
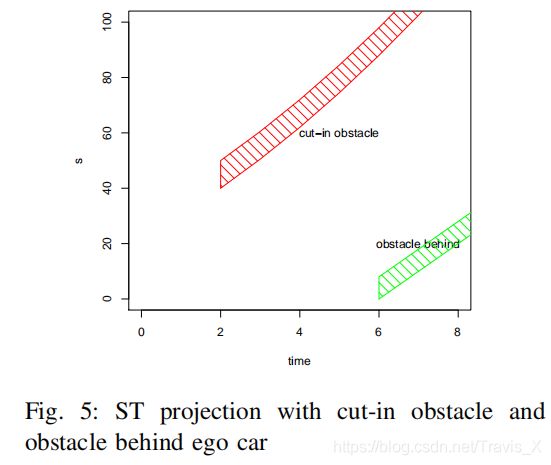
ST坐标系可以帮助我们设计和选择速度曲线,“S”表示车辆的纵向位移,“T”表示时间,ST图上的曲线是对车辆运动的描述,因为它说明了车辆在不同时间的位置,由于速度是位置变化的速率,因此可以通过曲线的斜率从ST图上推断速度,斜坡越陡说明在短时间内有更大的移动对应更快的速度。
二、DP Path(E-Step)
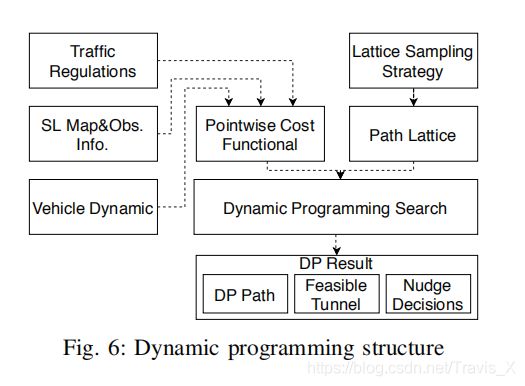
基于动态规划的路径步骤提供一条粗略的路径信息,其可以带来可行通道和避障决策。这一步包括Lattice采样、目标代价函数、动态规划搜索。过程如下所示:
2.1 Lattice采样
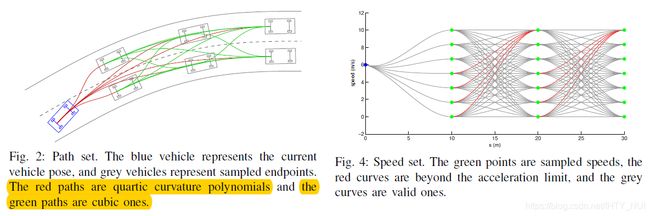
Lattice采样是基于Frenet坐标的。如7图所示,首先在车辆之前对多行lattice进行采样。不同行之间的点通过五次多项式来平滑连接。行之间的间隔距离取决于速度,道路结构,变换车道等。出于安全考虑,路径总长可以达到200m或者覆盖8s的行驶长度。

2.2 代价函数
每段Lattice路径的代价通过光滑程度、障碍物代价、车道代价来评价:

2.2.1 光滑程度
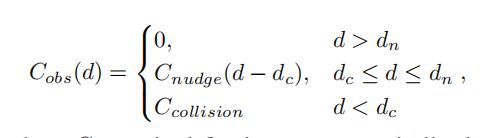
光滑程度通过以下方程来衡量,一阶导表示朝向偏差,二阶导表示曲率,三阶导表示曲率导数:
2.2.2 障碍物的代价
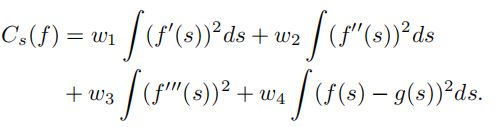
障碍物的代价通过以下方程来衡量,“d”代表的是车辆bounding box到障碍物bounding box的距离。
C n u d g e C_{nudge} Cnudge定义为单调递减函数,出于安全方面的考虑, d c d_c dc设置保留缓冲区,可根据情况微调 d n d_n dn范围。 C c o l l i s i o n C_{collision} Ccollision是碰撞代价函数,可帮助检测不可行的路径。
2.2.3 车道代价
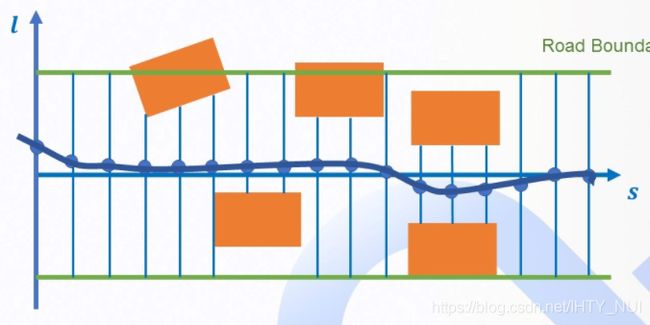
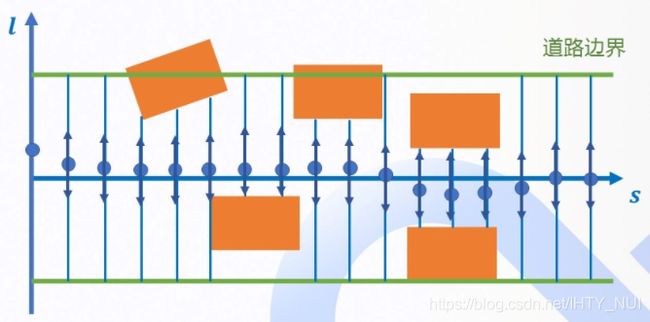
车道代价通过以下方程来衡量,主要是考虑在车辆行驶路线与车道中心线的差异。车道代价函数包括两个部分:引导线代价和车道代价。引导线定义为周围没有障碍物时的理想路径,通常这条线提取的是道路中心线。车道代价函数通常被道路边界决定,在道路外的路径点会受到很高代价的惩罚:

3.1 动态规划
DP路径算法的基本思路是,基于给定的一条中心路径(称为参考线,Reference Line)和车道边界条件,每隔一定间隔的纵向距离(称为不同级(level)上的S值)对道路截面进行均匀采样(与中心点的横向偏移值称为为L值),这样会得到图中黑点所示的采样点(这些采样点称为航点,waypoint)数组。基于一定的规则,可以给出各航点迁移的代价值(cost)。航点迁移不一定需要逐级进行,可以从第一级跳到第三级甚至终点,只要迁移代价值最小化即可,这显然满足动态规划的求解思路。

三、Spline Path(M-Step)
DP path(E-Step)这一步已经可以求解出一条粗略的可行路径,而样条QP要做的就是平滑这个DP输出来的路径。

QP求解器求解具有线性约束的目标函数生成最优的QP路径,过程如下:

3.1 代价函数
QP路径的代价函数是平滑度代价和引导线代价的线性组合。该步骤中的引导线是动态规划挑选出来的路径。引导线提供了避开障碍物的估计值。在数学上QP路径步骤优化以下函数:
g ( s ) g(s) g(s)是动态规划的结果。 f ′ ( s ) f'(s) f′(s)、 ′ ′ ( s ) ''(s) ′′(s),、 f ′ ′ ′ ( s ) f'''(s) f′′′(s)分别为航向角、曲率和曲率的变化率。该目标函数描述了避开障碍物和平滑度之间的权衡。
3.2 约束条件
DP的约束有两个:boundary constraints(边界约束) 和 dynamic feasibility(动力学约束)。
3.2.1 boundary constraints
边界约束也可以理解为碰撞约束,可以在车头车尾加两个半圆作为车辆边界以保证约束的线性和凸性。
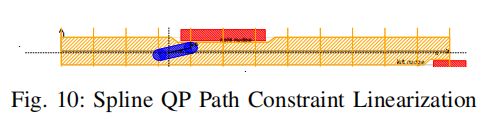
然后左前角的横向位置由以下表示,其中θ是汽车和道路状态方向之间的航向角。
![]()
可用下面的不等式进一步近似地线性约束:

3.2.2 dynamic feasibility
DP给出了由很多points(每个row上一个point)组成guidance line,QP可以此为基础调整每个point在L方向的位置以实现平滑path。但调整是有可行范围的,该范围可量化为QP的约束(lmin和lmax)。另外曲率 f ′ ′ ( s ) f''(s) f′′(s)和曲率变化率 f ′ ′ ′ ( s ) f'''(s) f′′′(s)也可以用dynamic feasibility去约束衡量(如下图)。
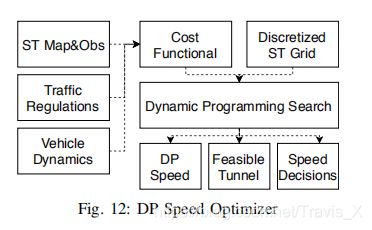
四、DP Speed Optimizer(E-Step)
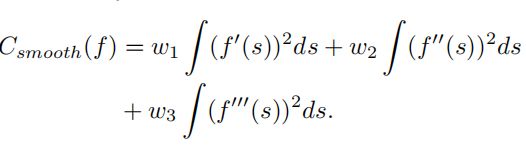
DP速度算法的基本思路是,在DP路径算法生成一条可行驶的路径后,从起点开始,考虑避开路径中的所有障碍物,并且让加减速最为平顺,以最优的速度曲线(即t-s平面中的绿色曲线)安全抵达终点,这也可以使用动态规划的思路求解。
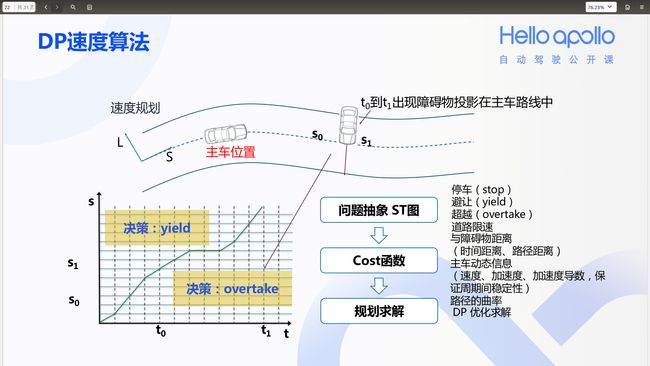
DP速度规划步骤包括ST图网格、代价函数和动态规划搜索,分别生成分段性速度曲线,可行的走廊和障碍物速度决策。
4.1 ST图
障碍物信息首先在ST图上离散成网格。将 ( t 0 , t 1 … t n ) (t_0,t_1…t_n) (t0,t1…tn)表示为在时间轴上具有间隔 d t d_t dt的等距评估点。分段性速度曲线函数在网格上表示为 S = ( s 0 , s 1 , … s n ) S=(s_0,s_1,…s_n) S=(s0,s1,…sn)。此外,利用有限差分方法对导数进行了逼近。

4.2 代价函数
目标是在ST图中优化一个带有约束的代价函数。准确地说,DP速度优化器的代价表示为:
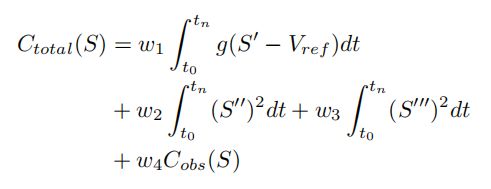
- 速度保持代价:表示当没有障碍物或者没有红绿灯时,车辆应按照指定的速度行驶。 r e f _{ref} ref 描述的是参考速度,参考速度由道路速度限制、曲率和其他交通规则来确定,g函数被用来对小于或者大于 V r e f V_{ref} Vref值施加的不同惩罚。
- 加速度a和加加速度jerk描述了速度曲线的平滑代价;
- C o b s C_{obs} Cobs值描述了总障碍代价,对车辆到所有的障碍物的距离进行评估,确定总障碍物代价。
4.3 动态规划搜索
动态规划搜索空间必须在动力学约束范围内。动态约束包括加速度、加加速度jerk和单调性约束。因为要求生成的轨迹在道路上不执行倒车的操作,只能在泊车或者其他指定情况下直行倒车。搜索算法是向前的,基于车辆动态约束的一些必要修剪也被应用以加速该过程。
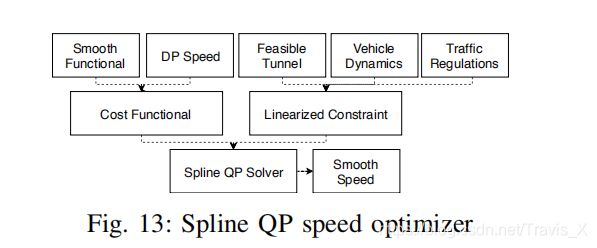
五、Spline QP Speed Optimizer(M-Step)
由于分段线性速度曲线不能满足动力学要求,需要用QP来解决这个问题。在图13中,样条速度包括三个部分:代价函数、线性约束条件。
5.1 代价函数
代价函数可以这样表示:
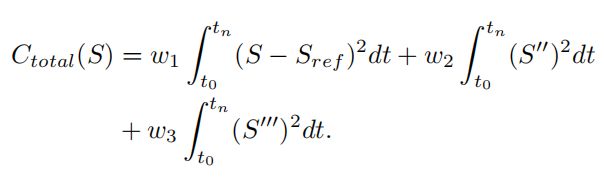
第一项是DP得出的速度曲线和最后QP生成的速度曲线之间的距离。第二、三项是平滑衡量,加速度和jerk。因此,目标函数是为了平衡引导线和平滑度。
5.2 约束
QP优化器是带有线性约束的。QP速度优化器的线性约束如下,其中:
第1项是单调性:保证车辆只能前行不能倒车;
第2项是ST曲线在某一时刻的上下界,算是表征碰撞的约束;
第3项是车速上限,一般从交通规则或车辆动力学得出;
第4项是加速度限制,一般由车辆动力学性能、舒适性决定;
第5项是加加速度限制,一般也由车辆动力学性能、舒适性决定;
参考
Apollo Lattice Planner从学习到放弃.额不…到实践
[论文解读]Baidu Apollo EM Motion Planner
动态规划及其在Apollo项目Planning模块的应用
自动驾驶之轨迹规划6——Apollo EM Motion Planner