在虚拟机中的 Ubuntu18.04安装ROS
在虚拟机中的 Ubuntu18.04安装ROS
讲道理,在虚拟机中安装ROS比在树莓派官方镜像中要简单的多,以下是虚拟机中安装ROS的过程,如需要 树莓派官方镜像+ROS可有偿提供。
**
一、换源
**
点击Ubuntu软件,选择软件更新,将如图对勾选中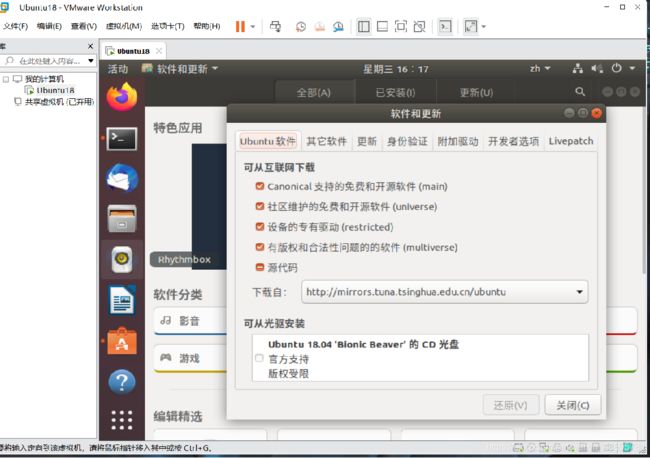
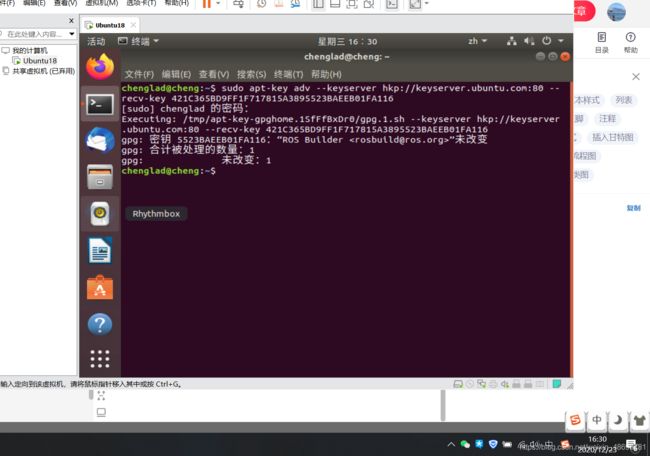
二、输入秘钥
打开终端
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
三、更新
sudo apt-get update
sudo apt-get upgrade
四、安装桌面版
安装桌面版包括了 ROS,rqt,rviz,机器人通用库,2D / 3D模拟器,导航和2D / 3D感知
ps:如果是其他ubuntu版本,则根据不同版本安装对应的ros版本。
比如:
14.04对应indigo,16.04对应kinetic,
18.04对应melodic,20.04对应noetic
sudo apt-get install ros-melodic-desktop-full
在这里如果出现无法定位软件包的错误,则在终端继续输入:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
该命令将电脑设置为接受来自packages.ros.org的软件
然后重新输入
`sudo apt-get install ros-melodic-desktop-full`
然后是漫长的等待至没有错误产生,该语句中‘melodic’由自身ubuntu版本的不同进行更改
**
五、初始化rosdep
**
sudo rosdep init
出现错误一:
sudo: rosdep:找不到命令
原因:
python-rosdep这个包没有装。
解决办法:
安装python-rosdep
sudo apt-get install python-rosdep
出现错误二:
website be down
原因:
应该是因为解析不了raw.githubusercontent.com(你报错的)这个网址
解决办法:
在https://site.ip138.com/raw.Githubusercontent.com/网站输入raw.githubusercontent.com来解析其服务器ip,进入网站后可以选择香港ip地址或者其他,将IP地址放入/etc/hosts文件中。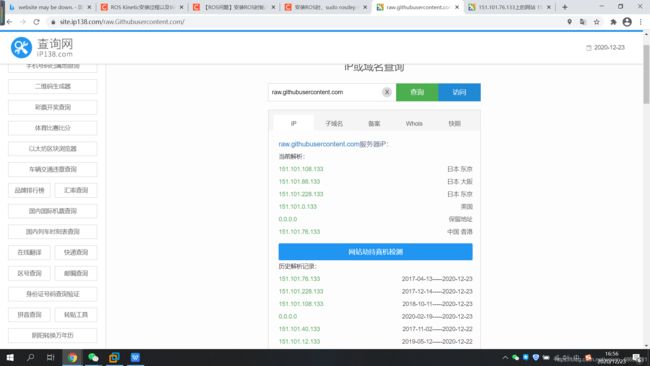
如果不想操作,在终端输入:
sudo gedit /etc/hosts
199.232.28.133 raw.githubusercontent.com
即可解决问题。
错误问题三:(参考古月居的错误问题解决,我没出现过这样的)
https://mp.weixin.qq.com/s/BVe01CTMpDu1fG8gfzsuNw
然后问题解决后:
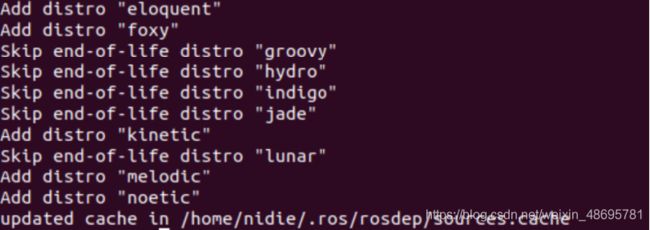
rosdep update
这里报错不同担心,出现错误Ctrl+C就重新输入该命令,直至安装成功如图。
六、添加ros环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果安装了多个ROS分发,则〜/ .bashrc必须仅为您当前使用的版本提供setup.bash。
rosinstall是一种常用的命令行工具可安装上
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
**
七、小海龟检验
**
打开新终端输入:
roscore
打开第二个新终端输入:
rosrun turtlesim turtlesim_node
打开第三个新终端输入:
rosrun turtlesim turtle_teleop_key
请将鼠标点击至第三个终端才可以移动海龟。
至此,第一次在虚拟机上安装ROS全部结束,相比于在树莓派上简单的多的多。本文主要参考了:
https://blog.csdn.net/haiyinshushe/article/details/84256137
https://blog.csdn.net/qq_14977553/article/details/107493616
https://mp.weixin.qq.com/s/BVe01CTMpDu1fG8gfzsuNw
在虚拟机上的安装如果还有其他问题,此三篇应该足够解决,这里主要汇总一下,希望我不会安装第二次了。