双目立体匹配方法:BM、SGBM、GC算法的实现及性能对比(附代码)
在双目立体匹配中,有基于SAD算法的BM、SGBM、GC立体匹配技术,但是在OpenCv3.0以后,GC算法就从legacy中去除掉了。为了查看三种算法的匹配效果及运算性能,我在Windows10中安装了OpenCv2.4.9,并以VsCode为IDE进行程序编写。
一、VsCode中集成OpenCv2.4.9
VsCode中集成OpenCv2.4.9,我主要是参照了这个文章的方法,根据这位博主的方法,我完成了环境的配置,由于需要相应的legacy库,所以我的tasks.json如下所示
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"command": "g++",
"args": [
"-g",
"-std=c++11",
"${file}",
"-o",
"${fileBasenameNoExtension}.exe",
"-I", "F:\\opencv\\build\\include",
"-I", "F:\\opencv\\build\\include\\opencv2",
"-I", "F:\\opencv\\build\\include\\opencv",
"-L", "F:\\opencv\\build\\x64\\MinGW\\lib",
"-l", "opencv_core249",
"-l", "opencv_imgproc249",
"-l", "opencv_video249",
"-l", "opencv_ml249",
"-l", "opencv_highgui249",
"-l", "opencv_objdetect249",
"-l", "opencv_flann249",
"-l", "opencv_photo249",
"-l", "opencv_legacy249",
"-l", "opencv_calib3d249"
],// 编译命令参数
"problemMatcher":{
"owner": "cpp",
"fileLocation":[
"relative",
"${workspaceFolder}"
],
"pattern":[
{
"regexp": "^([^\\\\s].*)\\\\((\\\\d+,\\\\d+)\\\\):\\\\s*(.*)$",
"file": 1,
"location": 2,
"message": 3
}
]
},
"group": {
"kind": "build",
"isDefault": true
}
}
二、程序的实现
程序实现的文章参考了OpenCV三种立体匹配求视差图算法总结这篇博客,同时也有对官网例程的参考。程序的完整代码如下:
#include 三、效果对比
我的电脑为联想拯救者Y7000,在上面运行,三种算法的时间分别为BM:8ms,SGBM:33ms,GC:2030ms,效果图如下:
tsukuba_l.png

tsukuba_r.png

BM算法
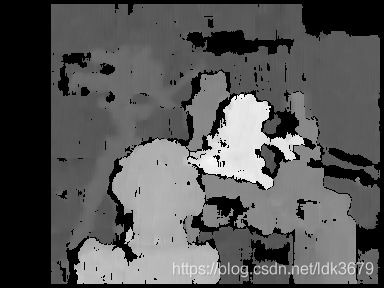
SGBM算法

GC算法
