【机器视觉案例】(6) AI视觉,距离测量,自制AI小游戏,附python完整代码
各位同学好,今天和大家分享一下如何使用 opencv + mediapipe 创建一个AI视觉小游戏,先放图看效果。
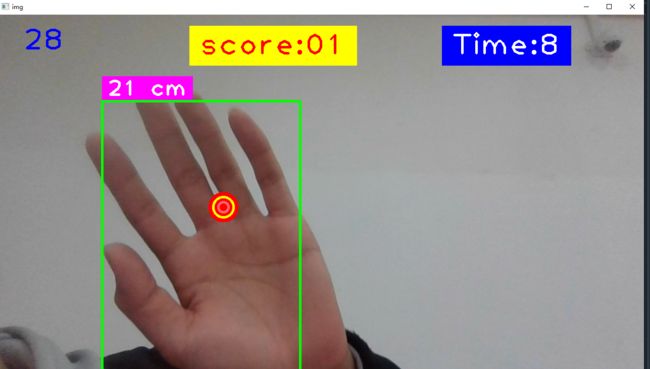
游戏规则,用手按下屏幕上的圆形按钮,每按一次后松开,按钮就随机出现在屏幕上的一个位置,看规定时间内能准确按下多少次按钮。根据手和摄像头之间的距离,当距离小于30cm,并且按钮在绿框内部,则认为是按下按钮,按钮变颜色,松开后,得分加一,并且按钮随机出现在另外一个位置。
游戏界面,左上角31代表FPS值,中间Score代表得分,Time代表游戏时间剩余几秒,31cm代表手和摄像机的之间距离。

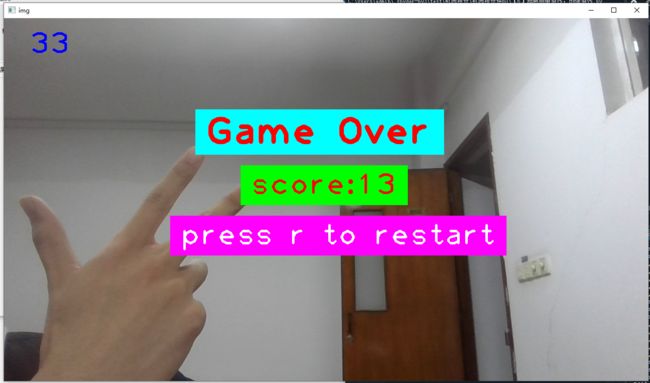
结算界面,显示最终得分score,按下键盘上的 r 键重新开始游戏。
1. 导入工具包
# 安装工具包
pip install opencv-contrib-python # 安装opencv
pip install mediapipe # 安装mediapipe
# pip install mediapipe --user #有user报错的话试试这个
pip install cvzone # 安装cvzone
# 导入工具包
import cv2
from cvzone.HandTrackingModule import HandDetector # 手部追踪方法
import time
import math
import random21个手部关键点信息如下,本节我们主要研究食指根部"5"和小指根部'17'的坐标信息。

本节所用的手部关键点检测的MediaPipe基本方法我参考我之前的文章:https://blog.csdn.net/dgvv4/article/details/122023047?spm=1001.2014.3001.5501,这里直接使用已经定义好的手部关键点检测方法。
2. 检测手部关键点
(1) cvzone.HandTrackingModule.HandDetector() 是手部关键点检测方法
参数:
mode: 默认为 False,将输入图像视为视频流。它将尝试在第一个输入图像中检测手,并在成功检测后进一步定位手的坐标。在随后的图像中,一旦检测到所有 maxHands 手并定位了相应的手的坐标,它就会跟踪这些坐标,而不会调用另一个检测,直到它失去对任何一只手的跟踪。这减少了延迟,非常适合处理视频帧。如果设置为 True,则在每个输入图像上运行手部检测,用于处理一批静态的、可能不相关的图像。
maxHands: 最多检测几只手,默认为 2
detectionCon: 手部检测模型的最小置信值(0-1之间),超过阈值则检测成功。默认为 0.5
minTrackingCon: 坐标跟踪模型的最小置信值 (0-1之间),用于将手部坐标视为成功跟踪,不成功则在下一个输入图像上自动调用手部检测。将其设置为更高的值可以提高解决方案的稳健性,但代价是更高的延迟。如果 mode 为 True,则忽略这个参数,手部检测将在每个图像上运行。默认为 0.5
它的参数和返回值类似于官方函数 mediapipe.solutions.hands.Hands()
(2)cvzone.HandTrackingModule.HandDetector.findHands() 找到手部关键点并绘图
参数:
img: 需要检测关键点的帧图像,格式为BGR
draw: 是否需要在原图像上绘制关键点及识别框
flipType: 图像是否需要翻转,当视频图像和我们自己不是镜像关系时,设为True就可以了
返回值:
hands: 检测到的手部信息,由0或1或2个字典组成的列表。如果检测到两只手就是由两个字典组成的列表。字典中包含:21个关键点坐标,检测框坐标及宽高,检测框中心坐标,检测出是哪一只手。
img: 返回绘制了关键点及连线后的图像
代码如下
import cv2
from cvzone.HandTrackingModule import HandDetector
import time
import math
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 捕获电脑摄像头
cap.set(3, 1280) # 设置显示窗口宽度1280
cap.set(4, 720) # 显示窗口高度720
pTime = 0 # 处理第一帧图像的起始时间
#(2)接收手部检测方法
detector = HandDetector(mode=False, # 静态图模式,若为True,每一帧都会调用检测方法,导致检测很慢
maxHands=1, # 最多检测几只手
detectionCon=0.8, # 最小检测置信度
minTrackCon=0.5) # 最小跟踪置信度
#(3)处理每一帧图像
while True:
# 返回图像是否读取成功,以及读取的帧图像img
success, img = cap.read()
#(4)获取手部关键点信息
# 检测手部信息,返回手部关键点信息hands字典,绘制关键点和连线后的图像img
hands, img = detector.findHands(img)
print(hands)
#(5)图像显示
# 计算FPS值
cTime = time.time() # 处理一帧图像所需的时间
fps = 1/(cTime-pTime)
pTime = cTime # 更新处理下一帧的起始时间
# 把fps值显示在图像上,img画板,显示字符串,显示的坐标位置,字体,字体大小,颜色,线条粗细
cv2.putText(img, str(int(fps)), (50,70), cv2.FONT_HERSHEY_PLAIN, 3, (255,0,0), 3)
# 显示图像,输入窗口名及图像数据
# cv2.namedWindow("img", 0) # 窗口大小可手动调整
cv2.imshow('img', img)
if cv2.waitKey(20) & 0xFF==27: #每帧滞留20毫秒后消失,ESC键退出
break
# 释放视频资源
cap.release()
cv2.destroyAllWindows()打印检测到的手部关键点信息hands列表,lmList中存放21个手部关键点的像素坐标,bbox中存放检测框的左上角坐标和框的宽高,center存放检测框的中心坐标,type检测的是左手还是右手。
-----------------------------------------------------------------
[{'lmList': [[227, 607], [335, 585], [439, 515], [508, 440], [563, 384], [434, 384], [491, 292], [520, 231], [543, 176], [380, 349], [423, 241], [445, 169], [459, 106], [320, 336], [347, 228], [368, 156], [387, 94], [250, 339], [255, 245], [264, 183], [279, 126]],
'bbox': (227, 94, 336, 513),
'center': (395, 350),
'type': 'Left'}]
[{'lmList': [[219, 628], [324, 605], [427, 532], [489, 451], [540, 390], [424, 401], [483, 310], [511, 250], [532, 195], [369, 366], [415, 263], [436, 192], [449, 129], [308, 353], [340, 250], [362, 181], [382, 120], [238, 358], [248, 268], [261, 209], [278, 154]],
'bbox': (219, 120, 321, 508),
'center': (379, 374),
'type': 'Left'}]
-----------------------------------------------------------------图像显示结果如下:
3. 距离检测,确定像素距离和实际厘米距离之间的映射关系
距离检测的思路是,获取手掌关键点信息中的食指根部"5"坐标lmList[5] 和小指根部'17'坐标lmList[17],计算这两个关键点之间的像素距离distance。将像素距离映射到手掌距离屏幕的实际距离。
在确定映射公式之前我们得先看一下掌间距离和相机与手之间的距离的对应关系,如下面代码中的第(3)步。x代表掌间距离,y代表相机和手之间的距离,举个例子,手掌间的像素距离为300时,对应的相机和手之间的距离是20cm。绘图查看对应关系。
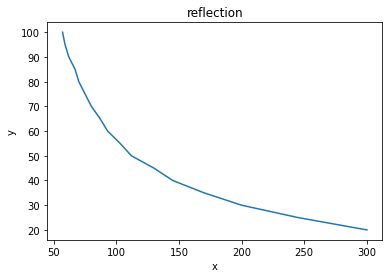
这里就简单的使用一个二次多项式去拟合这条曲线,得到手掌和摄像机之间的大致的距离。感兴趣的可以用指数拟合,更准确一些。使用 np.polyfit(x, y, 2) 函数,指定 x 和 y 之间是 2 次多项式关系,即 ![]() 。返回值是一个数组coff,存放多项式的系数A、B、C。
。返回值是一个数组coff,存放多项式的系数A、B、C。
因此,在计算实际距离distanceCM时,就可以根据二次多项式公式计算每一帧图像的手掌和摄像机之间的距离,distanceCM = A*distance**2 + B*distance + C。
我们在上述代码中补充。
import cv2
import cvzone
from cvzone.HandTrackingModule import HandDetector
import time
import math
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 捕获电脑摄像头
cap.set(3, 1280) # 设置显示窗口宽度1280
cap.set(4, 720) # 显示窗口高度720
pTime = 0 # 处理第一帧图像的起始时间
#(2)接收手部检测方法
detector = HandDetector(mode=False, # 静态图模式,若为True,每一帧都会调用检测方法,导致检测很慢
maxHands=1, # 最多检测几只手
detectionCon=0.8, # 最小检测置信度
minTrackCon=0.5) # 最小跟踪置信度
#(3)找到手掌间的距离和实际的手与摄像机之间的距离的映射关系
# x 代表手掌间的距离(像素距离),y 代表手和摄像机之间的距离(cm)
x = [300, 245, 200, 170, 145, 130, 112, 103, 93, 87, 80, 75, 70, 67, 62, 59, 57]
y = [20, 25, 30, 35, 40, 45, 50, 55, 60, 65, 70, 75, 80, 85, 90, 95, 100]
# 绘图查看xy的对应关系
import matplotlib.pyplot as plt
plt.plot(x,y)
plt.xlabel('x')
plt.ylabel('y')
plt.title('reflection')
# 因此我们需要一个类似 y = AX^2 + BX + C 的方程来拟合
import numpy as np
coff = np.polyfit(x, y, 2) #构造二阶多项式方程
# coff中存放的是二阶多项式的系数 A,B,C
#(4)处理每一帧图像
while True:
# 返回图像是否读取成功,以及读取的帧图像img
success, img = cap.read()
#(5)获取手部关键点信息
# 检测手部信息,返回手部关键点信息hands字典,不绘制图像
hands = detector.findHands(img, draw=False)
# 如果检测到手的话hands字典就不为空
if hands:
# 获取检测框的信息(x,y,w,h)
x, y, w, h = hands[0]['bbox']
# 获取字典中的关键点信息,key为lmList
lmList = hands[0]['lmList'] # hands[0]代表检测到的这只手的字典信息,hands是一个列表
print('hands_landmarks:', lmList)
# 获取食指根部'5'和小指根部'17'的坐标点
x1, y1 = lmList[5]
x2, y2 = lmList[17]
# 勾股定理计算关键点'5'和'17'之间的距离,并变成整型
distance = int(math.sqrt((x2-x1)**2 + (y2-y1)**2))
print('distance between 5 and 17:', distance)
# 拟合的二次多项式的系数保存在coff数组中,即掌间距离和手与相机间的距离的对应关系的系数
A, B, C = coff
# 得到像素距离转为实际cm距离的公式 y = Ax^2 + Bx + C
distanceCM = A*distance**2 + B*distance + C
print('distance CM:', distanceCM)
# 把距离绘制在图像上,简化了cv2.putText(),
cvzone.putTextRect(img, f'{(int(distanceCM))} cm', (x+10,y-10))
# 绘制手部检测框
cv2.rectangle(img, (x,y), (x+w,y+h), (0,255,0), 2)
#(6)图像显示
# 计算FPS值
cTime = time.time() # 处理一帧图像所需的时间
fps = 1/(cTime-pTime)
pTime = cTime # 更新处理下一帧的起始时间
# 把fps值显示在图像上,img画板,显示字符串,显示的坐标位置,字体,字体大小,颜色,线条粗细
cv2.putText(img, str(int(fps)), (50,70), cv2.FONT_HERSHEY_PLAIN, 3, (255,0,0), 3)
# 显示图像,输入窗口名及图像数据
# cv2.namedWindow("img", 0) # 窗口大小可手动调整
cv2.imshow('img', img)
if cv2.waitKey(20) & 0xFF==27: #每帧滞留20毫秒后消失,ESC键退出
break
# 释放视频资源
cap.release()
cv2.destroyAllWindows()打印每帧的21个关键点信息 hands_landmarks,掌间像素距离 distance between 5 and 17,手掌和相机间的厘米距离 distance CM
-----------------------------------------------------------------------
hands_landmarks: [[211, 581], [276, 570], [340, 530], [373, 468], [371, 413], [360, 465], [382, 403], [358, 423], [340, 458], [327, 443], [345, 384], [311, 424], [292, 466], [294, 428], [306, 374], [281, 414], [266, 457], [261, 419], [271, 378], [256, 407], [246, 443]]
distance between 5 and 17: 109
distance CM: 56.75208816895032
hands_landmarks: [[151, 608], [212, 607], [286, 557], [306, 486], [280, 436], [301, 483], [322, 418], [295, 473], [287, 505], [262, 466], [273, 409], [248, 478], [246, 502], [222, 457], [229, 409], [210, 478], [210, 503], [180, 451], [185, 417], [177, 467], [177, 491]]
distance between 5 and 17: 125
distance CM: 48.49262820874043
-----------------------------------------------------------------------显示结果如图,23cm代表手掌距离摄像机有多远。
4. 创建虚拟按键,建立游戏规则
从第(8)步开始,如果手掌距离摄像机小于30cm,并且按钮的中心点坐标(cx, cy)在检测框内部,那么就认为此时手掌已经按下按钮,counter变成1,按钮变成红色,counter变成2。如果手掌一直按着按钮,那么counter一直保持着 counter=2。如果松开那么此时的counter自动从2加1,变成counter=3。颜色置为初始值,得分加一,按钮随机出现在屏幕中的任意位置random.randint(),重置按钮确认器counter=0。
key == ord('r') 表示当点击键盘上的R键时,可以重新开始游戏。
import cv2
import cvzone
from cvzone.HandTrackingModule import HandDetector
import time
import math
import random
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 捕获电脑摄像头
cap.set(3, 1280) # 设置显示窗口宽度1280
cap.set(4, 720) # 显示窗口高度720
pTime = 0 # 处理第一帧图像的起始时间
#(2)接收手部检测方法
detector = HandDetector(mode=False, # 静态图模式,若为True,每一帧都会调用检测方法,导致检测很慢
maxHands=1, # 最多检测几只手
detectionCon=0.8, # 最小检测置信度
minTrackCon=0.5) # 最小跟踪置信度
#(3)找到手掌间的距离和实际的手与摄像机之间的距离的映射关系
# x 代表手掌间的距离(像素距离),y 代表手和摄像机之间的距离(cm)
x = [300, 245, 200, 170, 145, 130, 112, 103, 93, 87, 80, 75, 70, 67, 62, 59, 57]
y = [20, 25, 30, 35, 40, 45, 50, 55, 60, 65, 70, 75, 80, 85, 90, 95, 100]
# 绘图查看xy的对应关系
import matplotlib.pyplot as plt
plt.plot(x,y)
plt.xlabel('x')
plt.ylabel('y')
plt.title('reflection')
# 因此我们需要一个类似 y = AX^2 + BX + C 的方程来拟合
import numpy as np
coff = np.polyfit(x, y, 2) #构造二阶多项式方程
# coff中存放的是二阶多项式的系数 A,B,C
# 创建初始的按钮的位置
cx, cy = 255, 255
# 初始的按钮颜色红色,如果接下来手碰到了它就变颜色
color = (255,255,0)
# 设置计数器,有没有碰到按钮
counter = 0
# 设置初始得分
score = 0
# 设置游戏开始的起始时间
startTime = time.time()
# 设置游戏的总时间10s
totalTime = 20
#(4)处理每一帧图像
while True:
# 返回图像是否读取成功,以及读取的帧图像img
success, img = cap.read()
# 水平翻转图像,呈镜像关系
img = cv2.flip(img, 1) # 0代表垂直方向翻转,1代表水平方向
# 如果当前帧时间减去起始时间小于预设的时间,那么游戏继续进行
if time.time() - startTime <= totalTime:
#(5)获取手部关键点信息
# 检测手部信息,返回手部关键点信息hands字典,不绘制图像
hands = detector.findHands(img, draw=False)
# 如果检测到手的话hands字典就不为空
if hands:
# 获取检测框的信息(x,y,w,h)
x, y, w, h = hands[0]['bbox']
# 获取字典中的关键点信息,key为lmList
lmList = hands[0]['lmList'] # hands[0]代表检测到的这只手的字典信息,hands是一个列表
print('hands_landmarks:', lmList)
# 获取食指根部'5'和小指根部'17'的坐标点
x1, y1 = lmList[5]
x2, y2 = lmList[17]
# 勾股定理计算关键点'5'和'17'之间的距离,并变成整型
distance = int(math.sqrt((x2-x1)**2 + (y2-y1)**2))
print('distance between 5 and 17:', distance)
# 拟合的二次多项式的系数保存在coff数组中,即掌间距离和手与相机间的距离的对应关系的系数
A, B, C = coff
# 得到像素距离转为实际cm距离的公式 y = Ax^2 + Bx + C
distanceCM = A*distance**2 + B*distance + C
print('distance CM:', distanceCM)
# 把距离绘制在图像上,简化了cv2.putText(),
cvzone.putTextRect(img, f'{(int(distanceCM))} cm', (x+10,y-10))
# 绘制手部检测框
cv2.rectangle(img, (x,y), (x+w,y+h), (0,255,0), 3)
#(8)设置游戏规则
if distanceCM <= 30: # 如果手距相机的距离小于40cm,并且按钮在检测框内部,就认为碰到了
if x 当手掌按下按钮,按钮颜色从青色变成红色,手不松开按钮的话按钮的颜色保持是不变,位置也不变,并且得分板也不增加。只有松开后才会重置位置,计数加一。练习拍击按钮的快准狠。