深度详解ResNet到底在解决一个什么问题?
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
![]()
https://www.zhihu.com/question/64494691
本文仅作为学术分享,如果侵权,会删文处理
最近看到不少ResNet的变体,比如ResNeSt、IResNet等。虽然ResNet发布于2015年,但目前仍有大量CV任务用其作为backbone。
截止2020年5月1日,ResNet的引用量已达到44224(数据来自谷歌学术),本文就来深入探讨一下强悍的ResNet。

Resnet到底在解决一个什么问题呢?
既然可以通过初试化和归一化(BN层)解决梯度弥散或爆炸的问题,那Resnet提出的那条通路是在解决什么问题呢?
在He的原文中有提到是解决深层网络的一种退化问题,但并明确说明是什么问题!
作者:王峰
https://www.zhihu.com/question/64494691/answer/220989469
17年2月份有篇文章,正好跟这个问题一样。
The Shattered Gradients Problem: If resnets are the answer, then what is the question?
大意是神经网络越来越深的时候,反传回来的梯度之间的相关性会越来越差,最后接近白噪声。因为我们知道图像是具备局部相关性的,那其实可以认为梯度也应该具备类似的相关性,这样更新的梯度才有意义,如果梯度接近白噪声,那梯度更新可能根本就是在做随机扰动。
有了梯度相关性这个指标之后,作者分析了一系列的结构和激活函数,发现resnet在保持梯度相关性方面很优秀(相关性衰减从 到了 )。这一点其实也很好理解,从梯度流来看,有一路梯度是保持原样不动地往回传,这部分的相关性是非常强的。
作者:灰灰
https://www.zhihu.com/question/64494691/answer/271335912
一方面: ResNet解决的不是梯度弥散或爆炸问题,kaiming的论文中也说了:臭名昭著的梯度弥散/爆炸问题已经很大程度上被normalized initialization and intermediate normalization layers解决了;
另一方面: 由于直接增加网络深度的(plain)网络在训练集上会有更高的错误率,所以更深的网络并没有过拟合,也就是说更深的网络效果不好,是因为网络没有被训练好,至于为啥没有被训练好,个人很赞同前面王峰的答案中的解释。
在ResNet中,building block:
H(x)是期望拟合的特征图,这里叫做desired underlying mapping
一个building block要拟合的就是这个潜在的特征图
当没有使用残差网络结构时,building block的映射F(x)需要做的就是拟合H(x)
当使用了残差网络时,就是加入了skip connection 结构,这时候由一个building block 的任务由: F(x) := H(x),变成了F(x) := H(x)-x
对比这两个待拟合的函数,文中说假设拟合残差图更容易优化,也就是说:F(x) := H(x)-x比F(x) := H(x)更容易优化,接下来举了一个例子,极端情况下:desired underlying mapping要拟合的是identity mapping,这时候残差网络的任务就是拟合F(x): 0,而原本的plain结构的话就是F(x) : x,而F(x): 0任务会更容易,原因是:resnet(残差网络)的F(x)究竟长什么样子?中theone的答案:
F是求和前网络映射,H是从输入到求和后的网络映射。比如把5映射到5.1,那么引入残差前是F'(5)=5.1,引入残差后是H(5)=5.1, H(5)=F(5)+5, F(5)=0.1。这里的F'和F都表示网络参数映射,引入残差后的映射对输出的变化更敏感。比如s输出从5.1变到5.2,映射F'的输出增加了1/51=2%,而对于残差结构输出从5.1到5.2,映射F是从0.1到0.2,增加了100%。明显后者输出变化对权重的调整作用更大,所以效果更好。残差的思想都是去掉相同的主体部分,从而突出微小的变化,看到残差网络我第一反应就是差分放大器
后续的实验也是证明了假设的, 残差网络比plain网络更好训练。因此,ResNet解决的是更好地训练网络的问题,王峰的答案算是对ResNet之所以好的一个理论论证吧.
作者:薰风初入弦
https://www.zhihu.com/question/64494691/answer/786270699
看了这个问题之后我思考了很久,于是写出了这篇专栏,现在贴过来当答案。
首先是跟着论文的思路走,了解作者提出resnet的“心路历程”,最后也有些个人整理的理解。
ps:欢迎关注我的专栏,这段时间我会持续更新,并且在更完约莫十几篇论文阅读后,会再写一些模型实现/代码方面的理解。
https://zhuanlan.zhihu.com/IsonomiaCS
一、引言:为什么会有ResNet?Why ResNet?
神经网络叠的越深,则学习出的效果就一定会越好吗?
答案无疑是否定的,人们发现当模型层数增加到某种程度,模型的效果将会不升反降。也就是说,深度模型发生了退化(degradation)情况。
那么,为什么会出现这种情况?
1. 过拟合?Overfitting?
首先印入脑海的就是Andrew Ng机器学习公开课[1]的过拟合问题
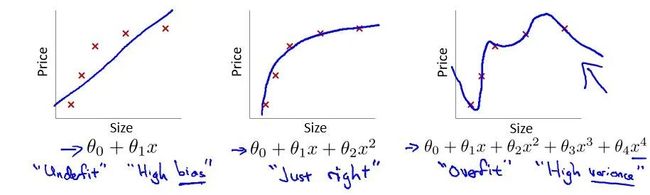 Andrew Ng的课件截图
Andrew Ng的课件截图
在这个多项式回归问题中,左边的模型是欠拟合(under fit)的此时有很高的偏差(high bias),中间的拟合比较成功,而右边则是典型的过拟合(overfit),此时由于模型过于复杂,导致了高方差(high variance)。
然而,很明显当前CNN面临的效果退化不是因为过拟合,因为过拟合的现象是"高方差,低偏差",即测试误差大而训练误差小。但实际上,深层CNN的训练误差和测试误差都很大。
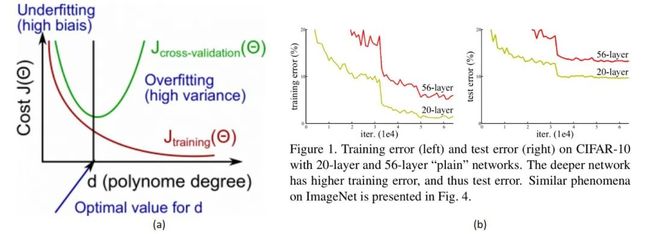 (a)欠拟合与过拟合 (b)模型退化
(a)欠拟合与过拟合 (b)模型退化
2. 梯度爆炸/消失?Gradient Exploding/Vanishing?
除此之外,最受人认可的原因就是“梯度爆炸/消失(弥散)”了。为了理解什么是梯度弥散,首先回顾一下反向传播的知识。
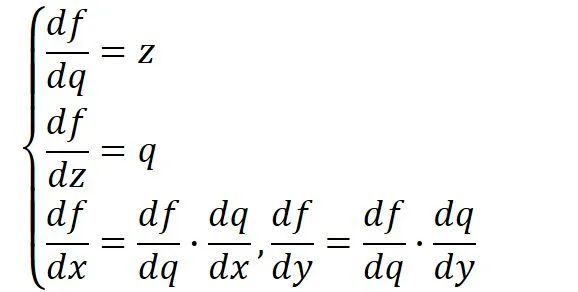
假设我们现在需要计算一个函数 , , ,在时的梯度,那么首先可以做出如下所示的计算图。
将 , ,带入,其中,令 ,一步步计算,很容易就能得出 。
这就是前向传播(计算图上部分绿色打印字体与蓝色手写字体),即:

前向传播是从输入一步步向前计算输出,而反向传播则是从输出反向一点点推出输入的梯度(计算图下红色的部分)。
 原谅我字丑……
原谅我字丑……
注:这里的反向传播假设输出端接受之前回传的梯度为1(也可以是输出对输出求导=1)
观察上述反向传播,不难发现,在输出端梯度的模值,经过回传扩大了3~4倍。
这是由于反向传播结果的数值大小不止取决于求导的式子,很大程度上也取决于输入的模值。当计算图每次输入的模值都大于1,那么经过很多层回传,梯度将不可避免地呈几何倍数增长(每次都变成3~4倍,重复上万次,想象一下310000有多大……),直到Nan。这就是梯度爆炸现象。
当然反过来,如果我们每个阶段输入的模恒小于1,那么梯度也将不可避免地呈几何倍数下降(比如每次都变成原来的三分之一,重复一万次就是3-10000),直到0。这就是梯度消失现象。值得一提的是,由于人为的参数设置,梯度更倾向于消失而不是爆炸。
由于至今神经网络都以反向传播为参数更新的基础,所以梯度消失问题听起来很有道理。然而,事实也并非如此,至少不止如此。
我们现在无论用Pytorch还是Tensorflow,都会自然而然地加上Bacth Normalization(简称BN),而BN的作用本质上也是控制每层输入的模值,因此梯度的爆炸/消失现象理应在很早就被解决了(至少解决了大半)。
不是过拟合,也不是梯度消失,这就很尴尬了……CNN没有遇到我们熟知的两个老大难问题,却还是随着模型的加深而导致效果退化。无需任何数学论证,我们都会觉得这不符合常理。等等,不符合常理……
3. 为什么模型退化不符合常理?
按理说,当我们堆叠一个模型时,理所当然的会认为效果会越堆越好。因为,假设一个比较浅的网络已经可以达到不错的效果,那么即使之后堆上去的网络什么也不做,模型的效果也不会变差。
然而事实上,这却是问题所在。“什么都不做”恰好是当前神经网络最难做到的东西之一。
MobileNet V2的论文[2]也提到过类似的现象,由于非线性激活函数Relu的存在,每次输入到输出的过程都几乎是不可逆的(信息损失)。我们很难从输出反推回完整的输入。
 Mobilenet v2是考虑的结果是去掉低维的Relu以保留信息
Mobilenet v2是考虑的结果是去掉低维的Relu以保留信息
也许赋予神经网络无限可能性的“非线性”让神经网络模型走得太远,却也让它忘记了为什么出发(想想还挺哲学)。这也使得特征随着层层前向传播得到完整保留(什么也不做)的可能性都微乎其微。
用学术点的话说,这种神经网络丢失的“不忘初心”/“什么都不做”的品质叫做恒等映射(identity mapping)。
因此,可以认为Residual Learning的初衷,其实是让模型的内部结构至少有恒等映射的能力。以保证在堆叠网络的过程中,网络至少不会因为继续堆叠而产生退化!
二、深度残差学习 Deep Residual Learning
1. 残差学习 Residual Learning
前面分析得出,如果深层网络后面的层都是是恒等映射,那么模型就可以转化为一个浅层网络。那现在的问题就是如何得到恒等映射了。
事实上,已有的神经网络很难拟合潜在的恒等映射函数H(x) = x。
但如果把网络设计为H(x) = F(x) + x,即直接把恒等映射作为网络的一部分。就可以把问题转化为学习一个残差函数F(x) = H(x) - x.
只要F(x)=0,就构成了一个恒等映射H(x) = x。而且,拟合残差至少比拟合恒等映射容易得多。
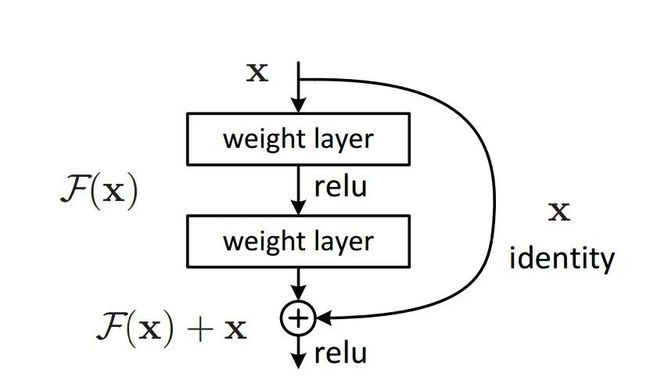
于是,就有了论文[3]中的Residual block结构
 Residual Block的结构
Residual Block的结构
图中右侧的曲线叫做跳接(shortcut connection),通过跳接在激活函数前,将上一层(或几层)之前的输出与本层计算的输出相加,将求和的结果输入到激活函数中做为本层的输出。
用数学语言描述,假设Residual Block的输入为 ,则输出 等于:
其中 是我们学习的目标,即输出输入的残差 。以上图为例,残差部分是中间有一个Relu激活的双层权重,即:
其中 指代Relu,而 指代两层权重。
顺带一提,这里一个Block中必须至少含有两个层,否则就会出现很滑稽的情况:
显然这样加了和没加差不多……
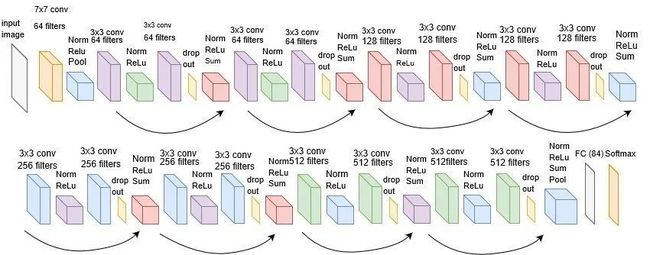
2.网络结构与维度问题
 ResNet结构示意图(左到右分别是VGG,没有残差的PlainNet,有残差的ResNet)
ResNet结构示意图(左到右分别是VGG,没有残差的PlainNet,有残差的ResNet)
论文中原始的ResNet34与VGG的结构如上图所示,可以看到即使是当年号称“Very Deep”的VGG,和最基础的Resnet在深度上相比都是个弟弟。
可能有好奇心宝宝发现了,跳接的曲线中大部分是实现,但也有少部分虚线。这些虚线的代表这些Block前后的维度不一致,因为去掉残差结构的Plain网络还是参照了VGG经典的设计思路:每隔x层,空间上/2(下采样)但深度翻倍。
也就是说,维度不一致体现在两个层面:
空间上不一致
深度上不一致
空间上不一致很简单,只需要在跳接的部分给输入x加上一个线性映射 ,即:
而对于深度上的不一致,则有两种解决办法,一种是在跳接过程中加一个1*1的卷积层进行升维,另一种则是直接简单粗暴地补零。事实证明两种方法都行得通。
注:深度上和空间上维度的不一致是分开处理的,但很多人将两者混为一谈(包括目前某乎一些高赞文章),这导致了一些人在模型的实现上感到困惑(比如当年的我)。
3. torchvision中的官方实现
事实上论文中的ResNet并不是最常用的,我们可以在Torchvision的模型库中找到一些很不错的例子,这里拿Resnet18为例:
运行代码:
import torchvision
model = torchvision.models.resnet18(pretrained=False) #我们不下载预训练权重
print(model)
得到输出:
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AvgPool2d(kernel_size=7, stride=1, padding=0)
(fc): Linear(in_features=512, out_features=1000, bias=True)
)
薰风说 Thinkings
上述的内容是我以自己的角度思考作者提出ResNet的心路历程,我比作者蔡很多,所以难免出现思考不全的地方。
ResNet是如此简洁高效,以至于模型提出后还有无数论文讨论“ResNet到底解决了什么问题(The Shattered Gradients Problem: If resnets are the answer, then what is the question?)”[4]
论文[4]认为,即使BN过后梯度的模稳定在了正常范围内,但梯度的相关性实际上是随着层数增加持续衰减的。而经过证明,ResNet可以有效减少这种相关性的衰减。
对于 层的网络来说,没有残差表示的Plain Net梯度相关性的衰减在 ,而ResNet的衰减却只有 。这也验证了ResNet论文本身的观点,网络训练难度随着层数增长的速度不是线性,而至少是多项式等级的增长(如果该论文属实,则可能是指数级增长的)
而对于“梯度弥散”观点来说,在输出引入一个输入x的恒等映射,则梯度也会对应地引入一个常数1,这样的网络的确不容易出现梯度值异常,在某种意义上,起到了稳定梯度的作用。
除此之外,shortcut类似的方法也并不是第一次提出,之前就有“Highway Networks”。可以只管理解为,以往参数要得到梯度,需要快递员将梯度一层一层中转到参数手中(就像我取个快递,都显示要从“上海市”发往“闵行分拣中心”,闵大荒日常被踢出上海籍)。而跳接实际上给梯度开了一条“高速公路”(取快递可以直接用无人机空投到我手里了),效率自然大幅提高,不过这只是个比较想当然的理由。
上面的理解很多论文都讲过,但我个人最喜欢下面两个理解。
第一个已经由Feature Pyramid Network[5]提出了,那就是跳连接相加可以实现不同分辨率特征的组合,因为浅层容易有高分辨率但是低级语义的特征,而深层的特征有高级语义,但分辨率就很低了。
第二个理解则是说,引入跳接实际上让模型自身有了更加“灵活”的结构,即在训练过程本身,模型可以选择在每一个部分是“更多进行卷积与非线性变换”还是“更多倾向于什么都不做”,抑或是将两者结合。模型在训练便可以自适应本身的结构,这听起来是多么酷的一件事啊!
有的人也许会纳闷,我们已经知道一个模型的来龙去脉了,那么在一个客观上已经十分优秀的模型,强加那么多主观的个人判断有意思吗?
然而笔者还是相信,更多角度的思考有助于我们发现现有模型的不足,以及值得改进的点。比如我最喜欢的两个理解就可以引申出这样的问题“虽然跳接可以结合不同分辨率,但ResNet显然没有充分利用这个优点,因为每个shortcut顶多跨越一种分辨率(大部分还不会发生跨越)”。
那么“如果用跳接组合更多分辨率的特征,模型的效果会不会更好?”这就是DenseNet回答我们的问题了。
参考文献
[1]https://www.coursera.org/learn/machine-learning
[2]Sandler M, Howard A, Zhu M, et al. MobileNetV2: Inverted Residuals and Linear Bottlenecks[J]. 2018.
[3]He K, Zhang X, Ren S, et al. Deep Residual Learning for Image Recognition[J]. 2015.
[4]Balduzzi D , Frean M , Leary L , et al. The Shattered Gradients Problem: If resnets are the answer, then what is the question?[J]. 2017.
[5]Lin T Y , Dollár, Piotr, Girshick R , et al. Feature Pyramid Networks for Object Detection[J]. 2016.
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~