OpenCV基于形状的模板匹配
OpenCV基于形状的模板匹配
-
- 引言
- 基于形状的匹配算法
-
- 具体代码
-
- KcgMatch.h
- KcgMatch.cpp
- main.cpp
- 匹配的结果
引言
- 在OpenCV中有个用于模板匹配的基本函数matchTemplate(),该函数使用某模板在搜索图像中进行搜索时,只能搜索到和模板完全一样的地方,一旦在搜索图像中要搜索的区域相较于模板是旋转了、放大缩小了或者部分遮掩了就无法匹配到结果了。
- 而在halcon中有个基于形状匹配的算子,这个算子非常好用,随便截取一个ROI区域做模板就可以在搜索图像中匹配到相似的区域,并且能输出搜索图像的位置,匹配尺度,匹配角度。也就是说自己截取的一个ROI区域,无论此区域在搜索图像中被放大、缩小还是旋转了、部分遮掩了都可以找到。而OpenCV本身的函数是不能实现此操作的。
- 本文简主要介绍一个类似于halcon算子的使用OpenCV实现的模板匹配算法的使用
(该算法来源于CSDN,因将其进行本地环境配置的时候无法运行,有些除算法之外的问题,故在此处进行一些简单的地方的修改,最终成功在本地运行,特以此进行记录)
该匹配算法的来源为:
一步一步实现多尺度多角度的形状匹配算法(C++版本).
基于形状的匹配算法
算法来源:一步一步实现多尺度多角度的形状匹配算法(C++版本).
具体代码
KcgMatch.h
#pragma once
/*M///
//
// Author : KayChan
// Explain : Shape matching
//
//M*/
#ifndef _KCG_MATCH_H_
#define _KCG_MATCH_H_
#include <opencv2/opencv.hpp>
#include <omp.h>
#ifndef ATTR_ALIGN
# if defined(__GNUC__)
# define ATTR_ALIGN(n) __attribute__((aligned(n)))
# else
# define ATTR_ALIGN(n) __declspec(align(n))
# endif
#endif // #ifndef ATTR_ALIGN
using namespace cv;
using namespace std;
namespace kcg {
struct MatchRange
{
float begin;
float end;
float step;
MatchRange() : begin(0.f), end(0.f), step(0.f) {}
MatchRange(float b, float e, float s);
};
inline MatchRange::MatchRange(float b, float e, float s) : begin(b), end(e), step(s) {}
typedef struct MatchRange AngleRange;
typedef struct MatchRange ScaleRange;
typedef struct ShapeInfo_S
{
float angle;
float scale;
}ShapeInfo;
typedef struct Feature_S
{
int x;
int y;
int lbl;
}Feature;
typedef struct Candidate_S
{
/// Sort candidates with high score to the front
bool operator<(const struct Candidate_S &rhs) const
{
return score > rhs.score;
}
float score;
Feature feature;
}Candidate;
typedef struct Template_S
{
int id = 0;
int pyramid_level = 0;
int is_valid = 0;
int x = 0;
int y = 0;
int w = 0;
int h = 0;
ShapeInfo shape_info;
vector<Feature> features;
}Template;
typedef struct Match_S
{
/// Sort matches with high similarity to the front
bool operator<(const struct Match_S &rhs) const
{
// Secondarily sort on template_id for the sake of duplicate removal
if (similarity != rhs.similarity)
return similarity > rhs.similarity;
else
return template_id < rhs.template_id;
}
bool operator==(const struct Match_S &rhs) const
{
return x == rhs.x && y == rhs.y && similarity == rhs.similarity;
}
int x;
int y;
float similarity;
int template_id;
}Match;
typedef enum PyramidLevel_E
{
PyramidLevel_0 = 0,
PyramidLevel_1 = 1,
PyramidLevel_2 = 2,
PyramidLevel_3 = 3,
PyramidLevel_4 = 4,
PyramidLevel_5 = 5,
PyramidLevel_6 = 6,
PyramidLevel_7 = 7,
PyramidLevel_TabooUse = 16,
}PyramidLevel;
typedef enum MatchingStrategy_E
{
Strategy_Accurate = 0,
Strategy_Middling = 1,
Strategy_Rough = 2,
}MatchingStrategy;
class KcgMatch
{
public:
KcgMatch(string model_root, string class_name);
~KcgMatch();
/*
@model: 输入图像
@angle_range: 角度范围
@scale_range: 尺度范围
@num_features: 特征数
@weak_thresh:弱阈值
@strong_thresh: 强阈值
@mask: 掩码
*/
void MakingTemplates(Mat model, AngleRange angle_range, ScaleRange scale_range,
int num_features, float weak_thresh = 30.0f, float strong_thresh = 60.0f,
Mat mask = Mat());
/*
加载模型
*/
void LoadModel();
/*
@source: 输入图像
@score_thresh: 匹配分数阈值
@overlap: 重叠阈值
@mag_thresh: 最小梯度阈值
@greediness: 贪婪度,越小匹配越快,但是可能无法匹配到目标
@pyrd_level: 金字塔层数,越大匹配越快,但是可能无法匹配到目标
@T: T参数
@top_k: 最多匹配多少个
@strategy: 精确匹配(0), 普通匹配(1), 粗略匹配(2)
@mask: 匹配掩码
*/
vector<Match> Matching(Mat source, float score_thresh = 0.9f, float overlap = 0.4f,
float mag_thresh = 30.f, float greediness = 0.8f, PyramidLevel pyrd_level = PyramidLevel_3,
int T = 2, int top_k = 0, MatchingStrategy strategy = Strategy_Accurate, const Mat mask = Mat());
void DrawMatches(Mat &image, vector<Match> matches, Scalar color);
protected:
void PaddingModelAndMask(Mat &model, Mat &mask, float max_scale);
vector<ShapeInfo> ProduceShapeInfos(AngleRange angle_range, ScaleRange scale_range);
Mat Transform(Mat src, float angle, float scale);
Mat MdlOf(Mat model, ShapeInfo info);
Mat MskOf(Mat mask, ShapeInfo info);
void DrawTemplate(Mat &image, Template templ, Scalar color);
void QuantifyEdge(Mat image, Mat &angle, Mat &quantized_angle, Mat &mag, float mag_thresh, bool calc_180 = true);
void Quantify8(Mat angle, Mat &quantized_angle, Mat mag, float mag_thresh);
void Quantify180(Mat angle, Mat &quantized_angle, Mat mag, float mag_thresh);
Template ExtractTemplate(Mat angle, Mat quantized_angle, Mat mag, ShapeInfo shape_info,
PyramidLevel pl, float weak_thresh, float strong_thresh, int num_features, Mat mask);
Template SelectScatteredFeatures(vector<Candidate> candidates, int num_features, float distance);
Rect CropTemplate(Template &templ);
void LoadRegion8Idxes();
void ClearModel();
void SaveModel();
void InitMatchParameter(float score_thresh, float overlap, float mag_thresh, float greediness, int T, int top_k, MatchingStrategy strategy);
void GetAllPyramidLevelValidSource(Mat &source, PyramidLevel pyrd_level);
vector<Match> GetTopKMatches(vector<Match> matches);
vector<Match> DoNmsMatches(vector<Match> matches, PyramidLevel pl, float overlap);
vector<Match> MatchingPyrd180(Mat src, PyramidLevel pl, vector<int> region_idxes = vector<int>());
vector<Match> MatchingPyrd8(Mat src, PyramidLevel pl, vector<int> region_idxes = vector<int>());
void Spread(const Mat quantized_angle, Mat &spread_angle, int T);
void ComputeResponseMaps(const Mat spread_angle, vector<Mat> &response_maps);
bool CalcPyUpRoiAndStartPoint(PyramidLevel cur_pl, PyramidLevel obj_pl, Match match,
Mat &r, Point &p, bool is_padding = false);
void CalcRegionIndexes(vector<int> ®ion_idxes, Match match, MatchingStrategy strategy);
vector<Match> ReconfirmMatches(vector<Match> matches, PyramidLevel pl);
vector<Match> MatchingFinal(vector<Match> matches, PyramidLevel pl);
private:
typedef vector<Template> TemplateMatchRange;
TemplateMatchRange templ_all_[PyramidLevel_TabooUse];
vector<Mat> sources_;
ATTR_ALIGN(32) float score_table_[180][180];
ATTR_ALIGN(8) unsigned char score_table_8map_[8][256];
string model_root_;
string class_name_;
AngleRange angle_range_;
ScaleRange scale_range_;
vector<int> region8_idxes_;
float score_thresh_;
float overlap_;
float mag_thresh_;
float greediness_;
int T_;
int top_k_;
MatchingStrategy strategy_;
};
}
#endif
KcgMatch.cpp
此处将原文里面的
namespace kcg_matching{}给删除了,注意里面的内容是保存的,只删除了这个外面的命名空间,此时就能在本人的main函数中进行调用了。
#include "KcgMatch.h"
#include <math.h>
using namespace kcg;
#define KCG_EPS 0.00001f
#define KCG_PI 3.1415926535897932384626433832795f
#define KCG_MODEL_SUFFUX string(".yaml")
const float AngleRegionTable[16][2] = {
0.f , 22.5f ,
22.5f , 45.f ,
45.f , 67.5f ,
67.5f , 90.f ,
90.f , 112.5f,
112.5f , 135.f ,
135.f , 157.5f,
157.5f , 180.f,
180.f , 202.5f,
202.5f , 225.f,
225.f , 247.5f,
247.5f , 270.f,
270.f , 292.5f,
292.5f , 315.f,
315.f , 337.5f,
337.5f , 360.f
};
namespace cv_dnn_nms {
template <typename T>
static inline bool SortScorePairDescend(const std::pair<float, T>& pair1, const std::pair<float, T>& pair2) {
return pair1.first > pair2.first;
}
inline void GetMaxScoreIndex(const std::vector<float>& scores, const float threshold, const int top_k,
std::vector<std::pair<float, int> >& score_index_vec) {
for (size_t i = 0; i < scores.size(); ++i)
{
if (scores[i] > threshold)
{
//score_index_vec.push_back(std::make_pair(scores[i], i));
std::pair<float, int> psi;
psi.first = scores[i];
psi.second = (int)i;
score_index_vec.push_back(psi);
}
}
std::stable_sort(score_index_vec.begin(), score_index_vec.end(),
SortScorePairDescend<int>);
if (top_k > 0 && top_k < (int)score_index_vec.size())
{
score_index_vec.resize(top_k);
}
}
template <typename BoxType>
inline void NMSFast_(const std::vector<BoxType>& bboxes,
const std::vector<float>& scores, const float score_threshold,
const float nms_threshold, const float eta, const int top_k,
std::vector<int>& indices, float(*computeOverlap)(const BoxType&, const BoxType&)) {
CV_Assert(bboxes.size() == scores.size());
std::vector<std::pair<float, int> > score_index_vec;
GetMaxScoreIndex(scores, score_threshold, top_k, score_index_vec);
float adaptive_threshold = nms_threshold;
indices.clear();
for (size_t i = 0; i < score_index_vec.size(); ++i) {
const int idx = score_index_vec[i].second;
bool keep = true;
for (int k = 0; k < (int)indices.size() && keep; ++k) {
const int kept_idx = indices[k];
float overlap = computeOverlap(bboxes[idx], bboxes[kept_idx]);
keep = overlap <= adaptive_threshold;
}
if (keep)
indices.push_back(idx);
if (keep && eta < 1 && adaptive_threshold > 0.5) {
adaptive_threshold *= eta;
}
}
}
template<typename _Tp> static inline
double jaccardDistance__(const Rect_<_Tp>& a, const Rect_<_Tp>& b) {
_Tp Aa = a.area();
_Tp Ab = b.area();
if ((Aa + Ab) <= std::numeric_limits<_Tp>::epsilon()) {
// jaccard_index = 1 -> distance = 0
return 0.0;
}
double Aab = (a & b).area();
// distance = 1 - jaccard_index
return 1.0 - Aab / (Aa + Ab - Aab);
}
template <typename T>
static inline float rectOverlap(const T& a, const T& b) {
return 1.f - static_cast<float>(jaccardDistance__(a, b));
}
void NMSBoxes(const std::vector<Rect>& bboxes, const std::vector<float>& scores,
const float score_threshold, const float nms_threshold,
std::vector<int>& indices, const float eta = 1, const int top_k = 0) {
NMSFast_(bboxes, scores, score_threshold, nms_threshold, eta, top_k, indices, rectOverlap);
}
} // end namespace cv_dnn_nms
KcgMatch::KcgMatch(string model_root, string class_name) {
assert(!model_root.empty() && "model_root should not empty.");
assert(!class_name.empty() && "class_name should not empty.");
if (model_root[model_root.length() - 1] != '/') {
model_root.push_back('/');
}
model_root_ = model_root;
class_name_ = class_name;
/// Create 180*180 table
for (int i = 0; i < 180; i++) {
for (int j = 0; j < 180; j++) {
float rad = (i - j) * KCG_PI / 180.f;
score_table_[i][j] = fabs(cosf(rad));
}
}
/// Create 8*8 table
ATTR_ALIGN(8) unsigned char score_table_8d[8][8];
for (int i = 0; i < 8; i++) {
for (int j = 0; j < 8; j++) {
float rad = (i - j) * (180.f / 8.f) * KCG_PI / 180.f;
score_table_8d[i][j] = (unsigned char)(fabs(cosf(rad))*100.f);
}
}
/// Create 8*256 table
for (int i = 0; i < 8; i++) {
for (int j = 0; j < 256; j++) {
unsigned char max_score = 0;
for (int shift_time = 0; shift_time < 8; shift_time++) {
unsigned char flg = (j >> shift_time) & 0b00000001;
if (flg) {
if (score_table_8d[i][shift_time] > max_score) {
max_score = score_table_8d[i][shift_time];
}
}
}
score_table_8map_[i][j] = max_score;
}
}
}
KcgMatch::~KcgMatch() {
}
void KcgMatch::MakingTemplates(Mat model, AngleRange angle_range, ScaleRange scale_range,
int num_features, float weak_thresh, float strong_thresh, Mat mask) {
ClearModel();
PaddingModelAndMask(model, mask, scale_range.end);
angle_range_ = angle_range;
scale_range_ = scale_range;
vector<ShapeInfo> shape_infos = ProduceShapeInfos(angle_range, scale_range);
vector<Mat> l0_mdls; l0_mdls.clear();
vector<Mat> l0_msks; l0_msks.clear();
for (int s = 0; s < shape_infos.size(); s++) {
l0_mdls.push_back(MdlOf(model, shape_infos[s]));
l0_msks.push_back(MskOf(mask, shape_infos[s]));
}
for (int p = 0; p <= PyramidLevel_7; p++) {
for (int s = 0; s < shape_infos.size(); s++) {
Mat mdl_pyrd = l0_mdls[s];
Mat msk_pyrd = l0_msks[s];
if (p > 0) {
Size sz = Size(l0_mdls[s].cols >> 1, l0_mdls[s].rows >> 1);
pyrDown(l0_mdls[s], mdl_pyrd, sz);
pyrDown(l0_msks[s], msk_pyrd, sz);
}
erode(msk_pyrd, msk_pyrd, Mat(), Point(-1, -1), 1, BORDER_REPLICATE);
l0_mdls[s] = mdl_pyrd;
l0_msks[s] = msk_pyrd;
int features_pyrd = (int)((num_features >> p) * shape_infos[s].scale);
Mat mag8, angle8, quantized_angle8;
QuantifyEdge(mdl_pyrd, angle8, quantized_angle8, mag8, weak_thresh, false);
Template templ = ExtractTemplate(angle8, quantized_angle8, mag8,
shape_infos[s], PyramidLevel(p),
weak_thresh, strong_thresh,
features_pyrd, msk_pyrd);
templ_all_[p].push_back(templ);
Mat mag180, angle180, quantized_angle180;
QuantifyEdge(mdl_pyrd, angle180, quantized_angle180, mag180, weak_thresh, true);
templ = ExtractTemplate(angle180, quantized_angle180, mag180,
shape_infos[s], PyramidLevel(p),
weak_thresh, strong_thresh,
features_pyrd, msk_pyrd);
templ_all_[p + 8].push_back(templ);
/// draw
/*Mat draw_mask;
msk_pyrd.copyTo(draw_mask);
DrawTemplate(draw_mask, templ, Scalar(0));
imshow("draw_mask", draw_mask);
waitKey(1);*/
}
cout << "train pyramid level " << p << " complete." << endl;
}
SaveModel();
}
vector<Match> KcgMatch::Matching(Mat source, float score_thresh, float overlap,
float mag_thresh, float greediness, PyramidLevel pyrd_level, int T, int top_k,
MatchingStrategy strategy, const Mat mask) {
InitMatchParameter(score_thresh, overlap, mag_thresh, greediness, T, top_k, strategy);
GetAllPyramidLevelValidSource(source, pyrd_level);
vector<Match> matches;
matches = MatchingPyrd8(sources_[pyrd_level], pyrd_level, region8_idxes_);
matches = GetTopKMatches(matches);
matches = ReconfirmMatches(matches, pyrd_level);
matches = GetTopKMatches(matches);
matches = MatchingFinal(matches, pyrd_level);
matches = GetTopKMatches(matches);
return matches;
}
void KcgMatch::DrawMatches(Mat &image, vector<Match> matches, Scalar color) {
//#pragma omp parallel for
for (int i = 0; i < matches.size(); i++) {
auto match = matches[i];
auto templ = templ_all_[8][match.template_id];
int w = match.x + templ.w;
int h = match.y + templ.h;
for (int i = 0; i < (int)templ.features.size(); i++) {
auto feature = templ.features[i];
//circle(image, cv::Point(match.x + feature.x, match.y + feature.y), 1, color, 1);
line(image,
Point(match.x + feature.x, match.y + feature.y),
Point(match.x + feature.x, match.y + feature.y),
color, 1);
}
//用来框选出矩形框的
cv::rectangle(image, { match.x, match.y }, { w, h }, color, 1);
char info[128];
sprintf_s(info,
"%.2f%% [%.2f, %.2f]",
match.similarity * 100,
templ.shape_info.angle,
templ.shape_info.scale);
cv::putText(image,
info,
Point(match.x, match.y), FONT_HERSHEY_PLAIN, 1.f, color, 1);
}
}
void KcgMatch::PaddingModelAndMask(Mat &model, Mat &mask, float max_scale) {
CV_Assert(!model.empty() && "model is empty.");
if (mask.empty())
mask = Mat(model.size(), CV_8UC1, { 255 });
else
CV_Assert(model.size() == mask.size());
int min_side_length = std::min(model.rows, model.cols);
int diagonal_line_length =
(int)ceil(std::sqrt(model.rows*model.rows + model.cols*model.cols)*max_scale);
int padding = ((diagonal_line_length - min_side_length) >> 1) + 16;
int double_padding = (padding << 1);
Mat model_padded = Mat(model.rows + double_padding, model.cols + double_padding, model.type(), Scalar::all(0));
model.copyTo(model_padded(Rect(padding, padding, model.cols, model.rows)));
Mat mask_padded = Mat(mask.rows + double_padding, mask.cols + double_padding, mask.type(), Scalar::all(0));
mask.copyTo(mask_padded(Rect(padding, padding, mask.cols, mask.rows)));
model = model_padded;
mask = mask_padded;
}
vector<ShapeInfo> KcgMatch::ProduceShapeInfos(AngleRange angle_range, ScaleRange scale_range) {
assert(scale_range.begin > KCG_EPS && scale_range.end > KCG_EPS);
assert(angle_range.end >= angle_range.begin);
assert(scale_range.end >= scale_range.begin);
assert(angle_range.step > KCG_EPS);
assert(scale_range.step > KCG_EPS);
vector<ShapeInfo> shape_infos;
shape_infos.clear();
for (float scale = scale_range.begin; scale <= scale_range.end + KCG_EPS; scale += scale_range.step) {
for (float angle = angle_range.begin; angle <= angle_range.end + KCG_EPS; angle += angle_range.step) {
ShapeInfo info;
info.angle = angle;
info.scale = scale;
shape_infos.push_back(info);
}
}
return shape_infos;
}
Mat KcgMatch::Transform(Mat src, float angle, float scale) {
Mat dst;
Point center(src.cols / 2, src.rows / 2);
Mat rot_mat = cv::getRotationMatrix2D(center, angle, scale);
warpAffine(src, dst, rot_mat, src.size());
return dst;
}
Mat KcgMatch::MdlOf(Mat model, ShapeInfo info) {
return Transform(model, info.angle, info.scale);
}
Mat KcgMatch::MskOf(Mat mask, ShapeInfo info) {
return (Transform(mask, info.angle, info.scale) > 0);
}
void KcgMatch::DrawTemplate(Mat &image, Template templ, Scalar color) {
for (int i = 0; i < templ.features.size(); i++) {
auto feature = templ.features[i];
line(image,
Point(templ.x + feature.x, templ.y + feature.y),
Point(templ.x + feature.x, templ.y + feature.y),
color, 1);
}
}
void KcgMatch::QuantifyEdge(Mat image, Mat &angle, Mat &quantized_angle, Mat &mag, float mag_thresh, bool calc_180) {
Mat dx, dy;
//Sobel(image, dx, CV_32F, 1, 0, 3, 1.0, 0.0, BORDER_REPLICATE);
//Sobel(image, dy, CV_32F, 0, 1, 3, 1.0, 0.0, BORDER_REPLICATE);
float mask_x[3][3] = { { -1,0,1 },{ -2,0,2 },{ -1,0,1 } };
float mask_y[3][3] = { { 1,2,1 },{ 0,0,0 },{ -1,-2,-1 } };
Mat kernel_x = Mat(3, 3, CV_32F, mask_x);
Mat kernel_y = Mat(3, 3, CV_32F, mask_y);
filter2D(image, dx, CV_32F, kernel_x);
filter2D(image, dy, CV_32F, kernel_y);
//dx = abs(dx);
//dy = abs(dy);
mag = dx.mul(dx) + dy.mul(dy);
phase(dx, dy, angle, true);
if (calc_180)
Quantify180(angle, quantized_angle, mag, mag_thresh);
else
Quantify8(angle, quantized_angle, mag, mag_thresh);
}
void KcgMatch::Quantify8(Mat angle, Mat &quantized_angle, Mat mag, float mag_thresh) {
Mat_<unsigned char> quantized_unfiltered;
angle.convertTo(quantized_unfiltered, CV_8U, 16.0f / 360.0f);
for (int r = 0; r < angle.rows; ++r)
{
unsigned char *quant_ptr = quantized_unfiltered.ptr<unsigned char>(r);
for (int c = 0; c < angle.cols; ++c)
{
quant_ptr[c] &= 7;
}
}
//quantized_unfiltered.copyTo(quantized_angle);
quantized_angle = Mat::zeros(angle.size(), CV_8U);
for (int r = 0; r < quantized_angle.rows; ++r) {
quantized_angle.ptr<unsigned char>(r)[0] = 255;
quantized_angle.ptr<unsigned char>(r)[quantized_angle.cols - 1] = 255;
}
for (int c = 0; c < quantized_angle.cols; ++c) {
quantized_angle.ptr<unsigned char>(0)[c] = 255;
quantized_angle.ptr<unsigned char>(quantized_angle.rows - 1)[c] = 255;
}
for (int r = 1; r < angle.rows - 1; ++r)
{
float *mag_ptr = mag.ptr<float>(r);
for (int c = 1; c < angle.cols - 1; ++c)
{
if (mag_ptr[c] >= (mag_thresh * mag_thresh))
{
int histogram[8] = { 0, 0, 0, 0, 0, 0, 0, 0 };
unsigned char *patch3x3_row = &quantized_unfiltered(r - 1, c - 1);
histogram[patch3x3_row[0]]++;
histogram[patch3x3_row[1]]++;
histogram[patch3x3_row[2]]++;
patch3x3_row += quantized_unfiltered.step1();
histogram[patch3x3_row[0]]++;
histogram[patch3x3_row[1]]++;
histogram[patch3x3_row[2]]++;
patch3x3_row += quantized_unfiltered.step1();
histogram[patch3x3_row[0]]++;
histogram[patch3x3_row[1]]++;
histogram[patch3x3_row[2]]++;
// Find bin with the most votes from the patch
int max_votes = 0;
int index = -1;
for (int i = 0; i < 8; ++i)
{
if (max_votes < histogram[i])
{
index = i;
max_votes = histogram[i];
}
}
// Only accept the quantization if majority of pixels in the patch agree
static const int NEIGHBOR_THRESHOLD = 5;
if (max_votes >= NEIGHBOR_THRESHOLD)
quantized_angle.at<unsigned char>(r, c) = index;
else
quantized_angle.at<unsigned char>(r, c) = 255;
}
else
{
quantized_angle.at<unsigned char>(r, c) = 255;
}
}
}
}
void KcgMatch::Quantify180(Mat angle, Mat &quantized_angle, Mat mag, float mag_thresh) {
quantized_angle = Mat::zeros(angle.size(), CV_8U);
#pragma omp parallel for
for (int r = 0; r < angle.rows; ++r)
{
unsigned char *quantized_angle_ptr = quantized_angle.ptr<unsigned char>(r);
float *angle_ptr = angle.ptr<float>(r);
float *mag_ptr = mag.ptr<float>(r);
for (int c = 0; c < angle.cols; ++c)
{
if (mag_ptr[c] >= (mag_thresh * mag_thresh))
quantized_angle_ptr[c] = (int)round(angle_ptr[c]) % 180;
else
quantized_angle_ptr[c] = 255;
}
}
}
Template KcgMatch::ExtractTemplate(Mat angle, Mat quantized_angle, Mat mag, ShapeInfo shape_info,
PyramidLevel pl, float weak_thresh, float strong_thresh, int num_features, Mat mask) {
Mat local_angle = Mat(angle.size(), angle.type());
for (int r = 0; r < angle.rows; ++r) {
float *angle_ptr = angle.ptr<float>(r);
float *local_angle_ptr = local_angle.ptr<float>(r);
for (int c = 0; c < angle.cols; ++c) {
float dir = angle_ptr[c];
if ((dir > 0. && dir < 22.5) || (dir > 157.5 && dir < 202.5) || (dir > 337.5 && dir < 360.))
local_angle_ptr[c] = 0.f;
else if ((dir > 22.5 && dir < 67.5) || (dir > 202.5 && dir < 247.5))
local_angle_ptr[c] = 45.f;
else if ((dir > 67.5 && dir < 112.5) || (dir > 247.5 && dir < 292.5))
local_angle_ptr[c] = 90.f;
else if ((dir > 112.5 && dir < 157.5) || (dir > 292.5 && dir < 337.5))
local_angle_ptr[c] = 135.f;
else
local_angle_ptr[c] = 0.f;
}
}
vector<Candidate> candidates;
candidates.clear();
bool no_mask = mask.empty();
float weak_sq = weak_thresh * weak_thresh;
float strong_sq = strong_thresh * strong_thresh;
float pre_grad, lst_grad;
for (int r = 1; r < mag.rows - 1; ++r)
{
const unsigned char *mask_ptr = no_mask ? NULL : mask.ptr<unsigned char>(r);
const float* pre_ptr = mag.ptr<float>(r - 1);
const float* cur_ptr = mag.ptr<float>(r);
const float* lst_ptr = mag.ptr<float>(r + 1);
float *local_angle_ptr = local_angle.ptr<float>(r);
for (int c = 1; c < mag.cols - 1; ++c)
{
if (no_mask || mask_ptr[c])
{
switch ((int)local_angle_ptr[c]) {
case 0:
pre_grad = cur_ptr[c - 1];
lst_grad = cur_ptr[c + 1];
break;
case 45:
pre_grad = pre_ptr[c + 1];
lst_grad = lst_ptr[c - 1];
break;
case 90:
pre_grad = pre_ptr[c];
lst_grad = lst_ptr[c];
break;
case 135:
pre_grad = pre_ptr[c - 1];
lst_grad = lst_ptr[c + 1];
break;
}
if ((cur_ptr[c] > pre_grad) && (cur_ptr[c] > lst_grad)) {
float score = cur_ptr[c];
bool validity = false;
if (score >= weak_sq) {
if (score >= strong_sq) {
validity = true;
}
else {
if (((pre_ptr[c - 1]) >= strong_sq) ||
((pre_ptr[c]) >= strong_sq) ||
((pre_ptr[c + 1]) >= strong_sq) ||
((cur_ptr[c - 1]) >= strong_sq) ||
((cur_ptr[c + 1]) >= strong_sq) ||
((lst_ptr[c - 1]) >= strong_sq) ||
((lst_ptr[c]) >= strong_sq) ||
((lst_ptr[c + 1]) >= strong_sq))
{
validity = true;
}
}
}
if (validity == true &&
quantized_angle.at<unsigned char>(r, c) != 255) {
Candidate cd;
cd.score = score;
cd.feature.x = c;
cd.feature.y = r;
cd.feature.lbl = quantized_angle.at<unsigned char>(r, c);
candidates.push_back(cd);
}
}
}
}
}
Template templ;
templ.shape_info.angle = shape_info.angle;
templ.shape_info.scale = shape_info.scale;
templ.pyramid_level = pl;
templ.is_valid = 0;
templ.features.clear();
if (candidates.size() >= num_features && num_features > 0) {
std::stable_sort(candidates.begin(), candidates.end());
float distance = static_cast<float>(candidates.size() / num_features + 1);
templ = SelectScatteredFeatures(candidates, num_features, distance);
}
else {
for (int c = 0; c < candidates.size(); c++) {
templ.features.push_back(candidates[c].feature);
}
}
if (templ.features.size() > 0) {
templ.is_valid = 1;
CropTemplate(templ);
}
return templ;
}
Template KcgMatch::SelectScatteredFeatures(vector<Candidate> candidates, int num_features, float distance) {
Template templ;
templ.features.clear();
float distance_sq = distance * distance;
int i = 0;
while (templ.features.size() < num_features) {
Candidate c = candidates[i];
// Add if sufficient distance away from any previously chosen feature
bool keep = true;
for (int j = 0; (j < (int)templ.features.size()) && keep; ++j)
{
Feature f = templ.features[j];
keep = ((c.feature.x - f.x) * (c.feature.x - f.x) + (c.feature.y - f.y) * (c.feature.y - f.y) >= distance_sq);
}
if (keep)
templ.features.push_back(c.feature);
if (++i == (int)candidates.size())
{
// Start back at beginning, and relax required distance
i = 0;
distance -= 1.0f;
distance_sq = distance * distance;
// if (distance < 3)
// {
// // we don't want two features too close
// break;
// }
}
}
return templ;
}
Rect KcgMatch::CropTemplate(Template &templ) {
int min_x = std::numeric_limits<int>::max();
int min_y = std::numeric_limits<int>::max();
int max_x = std::numeric_limits<int>::min();
int max_y = std::numeric_limits<int>::min();
// First pass: find min/max feature x,y
for (int i = 0; i < (int)templ.features.size(); ++i)
{
int x = templ.features[i].x;
int y = templ.features[i].y;
min_x = std::min(min_x, x);
min_y = std::min(min_y, y);
max_x = std::max(max_x, x);
max_y = std::max(max_y, y);
}
/// @todo Why require even min_x, min_y?
if (min_x % 2 == 1)
--min_x;
if (min_y % 2 == 1)
--min_y;
// Second pass: set width/height and shift all feature positions
templ.w = (max_x - min_x);
templ.h = (max_y - min_y);
templ.x = min_x;
templ.y = min_y;
for (int i = 0; i < (int)templ.features.size(); ++i)
{
templ.features[i].x -= templ.x;
templ.features[i].y -= templ.y;
}
return Rect(min_x, min_y, max_x - min_x, max_y - min_y);
}
void KcgMatch::LoadRegion8Idxes() {
int keys[16] = { 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0 };
region8_idxes_.clear();
int angle_region = (int)((angle_range_.end - angle_range_.begin) / angle_range_.step) + 1;
int scale_region = (int)((scale_range_.end - scale_range_.begin) / scale_range_.step) + 1;
for (int ar = 0; ar < angle_region; ar++) {
float cur_agl = templ_all_[PyramidLevel_0][ar].shape_info.angle;
if (cur_agl < 0.f) cur_agl += 360.f;
int idx = 0;
for (int i = 0; i < 16; i++) {
if (cur_agl >= AngleRegionTable[i][0] &&
cur_agl < AngleRegionTable[i][1]) {
idx = i;
break;
}
}
if (keys[idx] == 0) {
for (int sr = 0; sr < scale_region; sr++) {
region8_idxes_.push_back(ar + sr * angle_region);
}
}
keys[idx] = 1;
}
}
void KcgMatch::SaveModel() {
int total_templ = 0;
for (int i = 0; i < PyramidLevel_TabooUse; i++) {
total_templ += (int)templ_all_[i].size();
}
assert((total_templ / PyramidLevel_TabooUse) == templ_all_[0].size());
int match_range_size = (int)templ_all_[0].size();
string model_name = model_root_ + class_name_ + KCG_MODEL_SUFFUX;
FileStorage fs(model_name, FileStorage::WRITE);
fs << "class_name" << class_name_;
fs << "total_pyramid_levels" << PyramidLevel_7;
fs << "angle_range_bgin" << angle_range_.begin;
fs << "angle_range_end" << angle_range_.end;
fs << "angle_range_step" << angle_range_.step;
fs << "scale_range_bgin" << scale_range_.begin;
fs << "scale_range_end" << scale_range_.end;
fs << "scale_range_step" << scale_range_.step;
fs << "templates"
<< "[";
{
for (int i = 0; i < match_range_size; i++) {
fs << "{";
fs << "template_id" << int(i);
fs << "template_pyrds"
<< "[";
{
for (int j = 0; j < PyramidLevel_TabooUse; j++) {
auto templ = templ_all_[j][i];
fs << "{";
fs << "id" << int(i);
fs << "pyramid_level" << templ.pyramid_level;
fs << "is_valid" << templ.is_valid;
fs << "x" << templ.x;
fs << "y" << templ.y;
fs << "w" << templ.w;
fs << "h" << templ.h;
fs << "shape_scale" << templ.shape_info.scale;
fs << "shape_angle" << templ.shape_info.angle;
fs << "feature_size" << (int)templ.features.size();
fs << "features"
<< "[";
{
for (int k = 0; k < (int)templ.features.size(); k++) {
auto feat = templ.features[k];
fs << "[:" << feat.x << feat.y << feat.lbl << "]";
}
}
fs << "]";
fs << "}";
}
}
fs << "]";
fs << "}";
}
}
fs << "]";
}
void KcgMatch::LoadModel() {
ClearModel();
string model_name = model_root_ + class_name_ + KCG_MODEL_SUFFUX;
FileStorage fs(model_name, FileStorage::READ);
assert(fs.isOpened() && "load model failed.");
FileNode fn = fs.root();
angle_range_.begin = fn["angle_range_bgin"];
angle_range_.end = fn["angle_range_end"];
angle_range_.step = fn["angle_range_step"];
scale_range_.begin = fn["scale_range_bgin"];
scale_range_.end = fn["scale_range_end"];
scale_range_.step = fn["scale_range_step"];
FileNode tps_fn = fn["templates"];
FileNodeIterator tps_it = tps_fn.begin(), tps_it_end = tps_fn.end();
for (; tps_it != tps_it_end; ++tps_it)
{
int template_id = (*tps_it)["template_id"];
FileNode pyrds_fn = (*tps_it)["template_pyrds"];
FileNodeIterator pyrd_it = pyrds_fn.begin(), pyrd_it_end = pyrds_fn.end();
int pl = 0;
for (; pyrd_it != pyrd_it_end; ++pyrd_it)
{
FileNode pyrd_fn = (*pyrd_it);
Template templ;
templ.id = pyrd_fn["id"];
templ.pyramid_level = pyrd_fn["pyramid_level"];
templ.is_valid = pyrd_fn["is_valid"];
templ.x = pyrd_fn["x"];
templ.y = pyrd_fn["y"];
templ.w = pyrd_fn["w"];
templ.h = pyrd_fn["h"];
templ.shape_info.scale = pyrd_fn["shape_scale"];
templ.shape_info.angle = pyrd_fn["shape_angle"];
FileNode features_fn = pyrd_fn["features"];
FileNodeIterator feature_it = features_fn.begin(), feature_it_end = features_fn.end();
for (; feature_it != feature_it_end; ++feature_it)
{
FileNode feature_fn = (*feature_it);
FileNodeIterator feature_info = feature_fn.begin();
Feature feat;
feature_info >> feat.x >> feat.y >> feat.lbl;
templ.features.push_back(feat);
}
templ_all_[pl].push_back(templ);
pl++;
}
}
LoadRegion8Idxes();
}
void KcgMatch::ClearModel() {
for (int i = 0; i < PyramidLevel_TabooUse; i++) {
templ_all_[i].clear();
}
}
void KcgMatch::InitMatchParameter(float score_thresh, float overlap, float mag_thresh, float greediness, int T, int top_k, MatchingStrategy strategy) {
score_thresh_ = score_thresh;
overlap_ = overlap;
mag_thresh_ = mag_thresh;
greediness_ = greediness;
T_ = T;
top_k_ = top_k;
strategy_ = strategy;
}
void KcgMatch::GetAllPyramidLevelValidSource(cv::Mat &source, PyramidLevel pyrd_level) {
sources_.clear();
for (int pl = 0; pl <= pyrd_level; pl++) {
Mat source_pyrd;
if (pl == 0) source_pyrd = source;
else pyrDown(source, source_pyrd, Size(source.cols >> 1, source.rows >> 1));
source = source_pyrd;
sources_.push_back(source_pyrd);
}
}
vector<Match> KcgMatch::GetTopKMatches(vector<Match> matches) {
vector<Match> top_k_matches;
top_k_matches.clear();
if (top_k_ > 0 && (top_k_ < matches.size()) && (matches.size() > 0)) {
int k = 0;
top_k_matches.push_back(matches[0]);
for (int m = 1; m < matches.size(); m++) {
if (matches[m].similarity < matches[m - 1].similarity) {
++k;
if (k >= top_k_) break;
}
top_k_matches.push_back(matches[m]);
}
}
else
{
top_k_matches = matches;
}
return top_k_matches;
}
vector<Match> KcgMatch::DoNmsMatches(vector<Match> matches, PyramidLevel pl, float overlap) {
vector<Rect> boxes; boxes.clear();
vector<float> scores; scores.clear();
vector<int> indices; indices.clear();
for (int m = 0; m < matches.size(); m++) {
auto templ = templ_all_[pl][matches[m].template_id];
Rect box = Rect(matches[m].x, matches[m].y, templ.w, templ.h);
boxes.insert(boxes.end(), box);
scores.insert(scores.end(), matches[m].similarity);
}
cv_dnn_nms::NMSBoxes(boxes, scores, overlap, overlap, indices);
vector<Match> final_matches; final_matches.clear();
for (auto index : indices) {
final_matches.push_back(matches[index]);
}
return final_matches;
}
vector<Match> KcgMatch::MatchingPyrd180(Mat src, PyramidLevel pl, vector<int> region_idxes) {
pl = PyramidLevel(pl + 8);
vector<Match> matches; matches.clear();
Mat angle, quantized_angle, mag;
QuantifyEdge(src, angle, quantized_angle, mag, mag_thresh_, true);
#pragma omp parallel
{
int tlsz = region_idxes.empty() ? ((int)templ_all_[pl].size()) : ((int)region_idxes.size());
#pragma omp for nowait
for (int t = 0; t < tlsz; t++) {
Template templ = region_idxes.empty() ? (templ_all_[pl][t]) : (templ_all_[pl][region_idxes[t]]);
for (int r = 0; r < quantized_angle.rows - templ.h; r++) {
for (int c = 0; c < quantized_angle.cols - templ.w; c++) {
int fsz = (int)templ.features.size();
float partial_sum = 0.f;
bool valid = true;
for (int f = 0; f < fsz; f++) {
Feature feat = templ.features[f];
int sidx = quantized_angle.ptr<unsigned char>(r + feat.y)[c + feat.x];
int tidx = feat.lbl;
if (sidx != 255) {
partial_sum += score_table_[sidx][tidx];
}
if (partial_sum + (fsz - f) * greediness_ < score_thresh_ * fsz) {
valid = false;
break;
}
}
if (valid) {
float score = partial_sum / fsz;
if (score >= score_thresh_) {
Match match;
match.x = c;
match.y = r;
match.similarity = score;
match.template_id = templ.id;
#pragma omp critical
matches.insert(matches.end(), match);
}
}
}
}
}
}
matches = DoNmsMatches(matches, pl, overlap_);
return matches;
}
vector<Match> KcgMatch::MatchingPyrd8(Mat src, PyramidLevel pl, vector<int> region_idxes) {
vector<Match> matches; matches.clear();
Mat angle, quantized_angle, mag;
QuantifyEdge(src, angle, quantized_angle, mag, mag_thresh_, false);
Mat spread_angle;
Spread(quantized_angle, spread_angle, T_);
vector<Mat> response_maps;
ComputeResponseMaps(spread_angle, response_maps);
#pragma omp parallel
{
int tlsz = region_idxes.empty() ? ((int)templ_all_[pl].size()) : ((int)region_idxes.size());
#pragma omp for nowait
for (int t = 0; t < tlsz; t++) {
Template templ = region_idxes.empty() ? (templ_all_[pl][t]) : (templ_all_[pl][region_idxes[t]]);
for (int r = 0; r < quantized_angle.rows - templ.h; r += T_) {
for (int c = 0; c < quantized_angle.cols - templ.w; c += T_) {
int fsz = (int)templ.features.size();
int partial_sum = 0;
bool valid = true;
for (int f = 0; f < fsz; f++) {
Feature feat = templ.features[f];
int label = feat.lbl;
partial_sum +=
response_maps[label].ptr<unsigned char>(r + feat.y)[c + feat.x];
if (partial_sum + (fsz - f) * greediness_ < score_thresh_ * fsz) {
valid = false;
break;
}
}
if (valid) {
float score = partial_sum / (100.f * fsz);
if (score >= score_thresh_) {
Match match;
match.x = c;
match.y = r;
match.similarity = score;
match.template_id = templ.id;
#pragma omp critical
matches.insert(matches.end(), match);
}
}
}
}
}
}
matches = DoNmsMatches(matches, pl, overlap_);
return matches;
}
void KcgMatch::Spread(const Mat quantized_angle, Mat &spread_angle, int T) {
spread_angle = Mat::zeros(quantized_angle.size(), CV_8U);
int cols = quantized_angle.cols;
int rows = quantized_angle.rows;
int half_T = 0;
if (T != 1) half_T = T / 2;
#pragma omp parallel for
for (int r = half_T; r < rows - half_T; r++) {
for (int c = half_T; c < cols - half_T; c++) {
for (int i = -half_T; i <= half_T; i++) {
for (int j = -half_T; j <= half_T; j++) {
unsigned char shift_bits =
quantized_angle.ptr<unsigned char>(r + i)[c + j];
if (shift_bits < 8) {
spread_angle.ptr<unsigned char>(r)[c] |=
(unsigned char)(1 << shift_bits);
}
}
}
}
}
}
void KcgMatch::ComputeResponseMaps(const Mat spread_angle, vector<Mat> &response_maps) {
response_maps.clear();
for (int i = 0; i < 8; i++) {
Mat rm;
rm.create(spread_angle.size(), CV_8U);
response_maps.push_back(rm);
}
int cols = spread_angle.cols;
int rows = spread_angle.rows;
#pragma omp parallel for
for (int i = 0; i < 8; i++) {
for (int r = 0; r < rows; r++) {
for (int c = 0; c < cols; c++) {
response_maps[i].ptr<unsigned char>(r)[c] =
score_table_8map_[i][spread_angle.ptr<unsigned char>(r)[c]];
}
}
}
}
bool KcgMatch::CalcPyUpRoiAndStartPoint(PyramidLevel cur_pl, PyramidLevel obj_pl, Match match,
Mat &r, Point &p, bool is_padding) {
auto templ = templ_all_[cur_pl][match.template_id];
int padding = 0;
if (is_padding) {
int min_side = std::min(templ.w, templ.h);
int diagonal_line_length = (int)ceil(sqrt(templ.w*templ.w + templ.h*templ.h));
padding = diagonal_line_length - min_side;
}
int err_pl = cur_pl - obj_pl;
int T = 2 * T_;
int extend_pixel = 1;
cv::Point bp, ep;
int multiple = (1 << err_pl);
match.x -= (T + padding) / 2;
match.y -= (T + padding) / 2;
templ.w += (T + padding);
templ.h += (T + padding);
bp.x = (match.x - extend_pixel) * multiple;
bp.y = (match.y - extend_pixel) * multiple;
ep.x = (match.x + templ.w + extend_pixel) * multiple;
ep.y = (match.y + templ.h + extend_pixel) * multiple;
if (bp.x < 0) bp.x = 0;
if (bp.y < 0) bp.y = 0;
if (ep.x < 0) ep.x = 0;
if (ep.y < 0) ep.y = 0;
if (bp.x >= sources_[obj_pl].cols) bp.x = sources_[obj_pl].cols - 1;
if (bp.y >= sources_[obj_pl].rows) bp.y = sources_[obj_pl].rows - 1;
if (ep.x >= sources_[obj_pl].cols) ep.x = sources_[obj_pl].cols - 1;
if (ep.y >= sources_[obj_pl].rows) ep.y = sources_[obj_pl].rows - 1;
if (bp.x != ep.x || bp.y != ep.y) {
Rect rect = Rect(bp, ep);
Mat roi(sources_[obj_pl], rect);
r = roi;
p = bp;
return true;
}
else
{
return false;
}
}
void KcgMatch::CalcRegionIndexes(vector<int> ®ion_idxes, Match match, MatchingStrategy strategy) {
region_idxes.clear();
Template templ = templ_all_[PyramidLevel_0][match.template_id];
float match_agl = templ.shape_info.angle;
float match_sal = templ.shape_info.scale;
int angle_region = (int)((angle_range_.end - angle_range_.begin) / angle_range_.step) + 1;
int scale_region = (int)((scale_range_.end - scale_range_.begin) / scale_range_.step) + 1;
if (strategy <= Strategy_Middling) {
if (match_agl < 0.f) match_agl += 360.f;
int key = (int)floor(match_agl / 22.5f);
float left_agl = match_agl - key * 22.5f;
for (int ar = 0; ar < angle_region; ar++) {
float cur_agl = templ_all_[PyramidLevel_0][ar].shape_info.angle;
if (cur_agl < 0.f) cur_agl += 360.f;
int k = key;
if (cur_agl >= AngleRegionTable[k][0] && cur_agl < AngleRegionTable[k][1]) {
for (int sr = 0; sr < scale_region; sr++) {
region_idxes.push_back(ar + sr * angle_region);
}
}
if (strategy == Strategy_Accurate) {
if (left_agl < 11.25f) {
k = key - 1;
if (k < 0) k = 15;
if (cur_agl >= AngleRegionTable[k][0] && cur_agl < AngleRegionTable[k][1]) {
for (int sr = 0; sr < scale_region; sr++) {
region_idxes.push_back(ar + sr * angle_region);
}
}
}
else
{
k = key + 1;
if (k > 15) k = 0;
if (cur_agl >= AngleRegionTable[k][0] && cur_agl < AngleRegionTable[k][1]) {
for (int sr = 0; sr < scale_region; sr++) {
region_idxes.push_back(ar + sr * angle_region);
}
}
}
}
}
}
else if (strategy == Strategy_Rough) {
float err_range = 3.f;
for (int ar = 0; ar < angle_region; ar++) {
float cur_agl = templ_all_[PyramidLevel_0][ar].shape_info.angle;
if (cur_agl >= (match_agl - angle_range_.step * err_range) &&
cur_agl <= (match_agl + angle_range_.step * err_range)) {
for (int sr = 0; sr < scale_region; sr++) {
float cur_sal = templ_all_[PyramidLevel_0][ar + sr * angle_region].shape_info.scale;
if (cur_sal >= (match_sal - scale_range_.step * err_range) &&
cur_sal <= (match_sal + scale_range_.step * err_range)) {
region_idxes.push_back(ar + sr * angle_region);
}
}
}
}
}
}
vector<Match> KcgMatch::ReconfirmMatches(vector<Match> matches, PyramidLevel pl) {
vector<Match> rf_matches;
rf_matches.clear();
for (int i = 0; i < matches.size(); i++) {
Mat roi;
Point sp;
CalcPyUpRoiAndStartPoint(pl, pl, matches[i], roi, sp, true);
vector<int> region_idxes;
CalcRegionIndexes(region_idxes, matches[i], Strategy_Accurate);
auto tmp_matches = MatchingPyrd8(roi, pl, region_idxes);
if (tmp_matches.size() > 0) {
tmp_matches[0].x += sp.x;
tmp_matches[0].y += sp.y;
rf_matches.push_back(tmp_matches[0]);
}
}
rf_matches = DoNmsMatches(rf_matches, pl, overlap_);
return rf_matches;
}
vector<Match> KcgMatch::MatchingFinal(vector<Match> matches, PyramidLevel pl) {
vector<Match> final_matches;
final_matches.clear();
for (int i = 0; i < matches.size(); i++) {
Mat roi;
Point sp;
CalcPyUpRoiAndStartPoint(pl, PyramidLevel_0, matches[i], roi, sp, false);
vector<int> region_idxes;
CalcRegionIndexes(region_idxes, matches[i], strategy_);
auto tmp_matches = MatchingPyrd180(roi, PyramidLevel_0, region_idxes);
if (tmp_matches.size() > 0) {
tmp_matches[0].x += sp.x;
tmp_matches[0].y += sp.y;
final_matches.push_back(tmp_matches[0]);
}
}
final_matches = DoNmsMatches(final_matches, pl, overlap_);
return final_matches;
}
// end namespace kcg_matching
main.cpp
#include "KcgMatch.h"
using namespace kcg;
int main(int argc, char **argv) {
// 实例化KcgMatch
// "demo/k"为存储模板的根目录
// "k"为模板的名字
KcgMatch kcg("G:/模板/template3", "template3");
// 读取模板图像
Mat model = imread("G:模板/template3/template.png");
// 转灰度
if (model.channels() == 3) {
cvtColor(model, model, COLOR_BGR2GRAY);
}
// 指定要制作的模板角度,尺度范围
AngleRange ar(-180.f, 180.f, 10.f);
ScaleRange sr(0.70f, 1.3f, 0.05f);
// 开始制作模板(会在G:/模板/template3的路径下生成一个yaml文件,里面保存着生成的模板特征信息)
kcg.MakingTemplates(model, ar, sr, 0, 30.f, 60.f);
// 加载模板
cout << "Loading model ......" << endl;
kcg.LoadModel();
cout << "Load succeed." << endl;
// 读取搜索图像
Mat source = imread("G:/模板/template3/search.png");
Mat draw_source;
source.copyTo(draw_source);
if (source.channels() == 3) {
cvtColor(source, source, COLOR_BGR2GRAY);
}
//计算匹配时间(不需要windows.h的计算毫秒时间的方法)
double dur;
clock_t start, end;
start = clock();
//进行模板匹配
auto matches = kcg.Matching(source, 0.80f, 0.1f, 30.f, 0.9f,PyramidLevel_2, 2, 12, Strategy_Accurate);
end = clock();
dur = (double)(end - start);
printf("Use Time:%f\n", (dur / CLOCKS_PER_SEC));
cout << "Final match size: " << matches.size() << endl << endl;
// 画出匹配结果
kcg.DrawMatches(draw_source, matches, Scalar(0, 0, 255));
// 画出匹配时间
rectangle(draw_source, Rect(Point(0, 0), Point(136, 20)), Scalar(255, 255, 255), -1);
cv::putText(draw_source,
"time: " + to_string(dur / CLOCKS_PER_SEC) + "s",
Point(0, 16), FONT_HERSHEY_PLAIN, 1.f, Scalar(0, 0, 0), 1);
// 显示结果图像
namedWindow("draw_source", 0);
imshow("draw_source", draw_source);
imwrite("draw_source.jpg", draw_source);
waitKey(0);
system("pause");
}
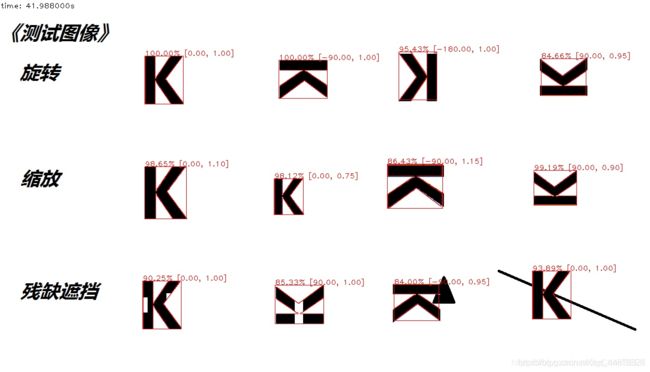
匹配的结果
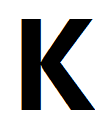
- 用于制作模板的图片,使用的是原作者的图片,此处将其命名为template.png,并将此图片放在了template3的文件夹中。图片为下:
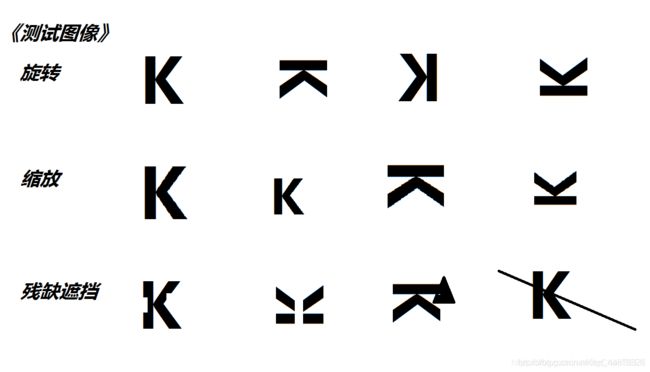
- 搜索图像,即用来寻找的图像如下,将其命名为search.png,也放在了template3的文件夹下。图片如下:
- 最终匹配的结果如下