Intel RealSense Depth Camera D435i 跑通 RTAB-Map
文章目录
-
- 运行命令参数
- 启动相机
- 查看发布的话题
- rqt_tf_tree
- rqt_graph
- 启动rtabmap_ros
- 增加base_footprint 底盘坐标系
- 深度图转换为雷达数据
- 保存地图
- RTAB-Map 点云滤波、点云分割与地面检测
- 参考链接
安装步骤
move_base_msgsConfig.cmake
move_base_msgs-config.cmake
ddynamic_reconfigureConfig.cmake
ddynamic_reconfigure-config.cmake
sudo apt-get install ros-kinetic-move-base-msgs
sudo apt-get install ros-kinetic-ddynamic-reconfigure
cd ~
mkdir -p rtabmap_ros_ws/src
git clone https://github.com/introlab/rtabmap_ros.git src/rtabmap_ros
cd src
catkin_init_workspace
cd ~
git clone https://github.com/introlab/rtabmap.git rtabmap
cd rtabmap/build
cmake -DWITH_G2O=OFF -DWITH_GTSAM=OFF -DCMAKE_INSTALL_PREFIX=~/projects/rtabmap_ros_ws/devel ..
make -j4
make install
catkin_make -j4
echo "source ~/catkin_ws/devel/setup.bash " >> ~/.bashrc
source ~/.bashrc
运行命令参数



启动相机
roslaunch realsense2_camera rs_camera.launch
查看发布的话题
rostopic list
/camera/color/camera_info
/camera/color/image_raw
/camera/infra1/camera_info
/camera/infra1/image_rect_raw
/camera/infra2/camera_info
/camera/infra2/image_rect_raw
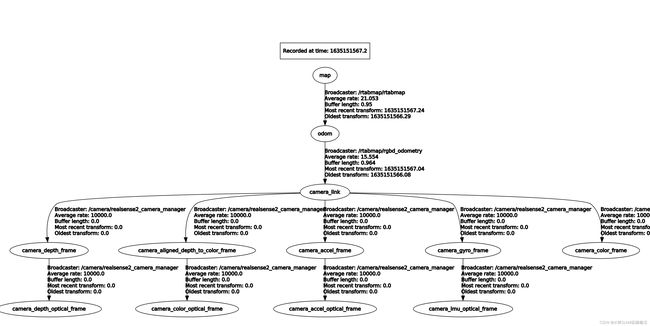
rqt_tf_tree
rosrun rqt_tf_tree rqt_tf_tree
/camera/realsense2_camera/base_frame_id: camera_link

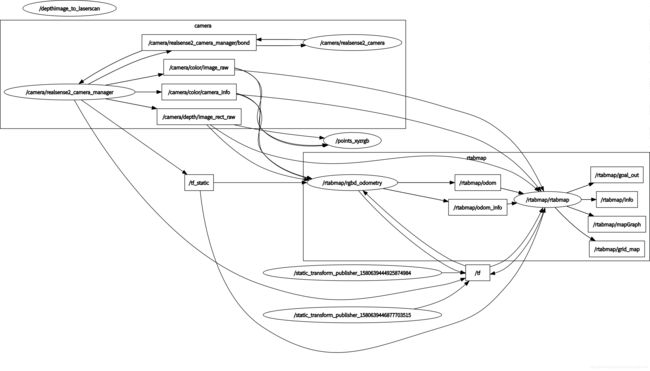
rqt_graph

启动rtabmap_ros
roslaunch realsense2_camera rs_camera.launch \
align_depth:=true \
unite_imu_method:="linear_interpolation" \
enable_gyro:=true \
enable_accel:=true
rosrun imu_filter_madgwick imu_filter_node \
_use_mag:=false \
_publish_tf:=false \
_world_frame:="enu" \
/imu/data_raw:=/camera/imu \
/imu/data:=/rtabmap/imu
roslaunch rtabmap_ros rtabmap.launch \
rtabmap_args:="--delete_db_on_start --Optimizer/GravitySigma 0.3" \
depth_topic:=/camera/aligned_depth_to_color/image_raw \
rgb_topic:=/camera/color/image_raw \
camera_info_topic:=/camera/color/camera_info \
approx_sync:=false \
wait_imu_to_init:=true \
imu_topic:=/rtabmap/imu
增加base_footprint 底盘坐标系

roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Optimizer/GravitySigma 0.3" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=false wait_imu_to_init:=true imu_topic:=/rtabmap/imu frame_id:=base_footprint
rosrun tf static_transform_publisher 0 0 0 0 0 0 base_footprint camera_link 100
rosrun tf static_transform_publisher 0 0 0 0 0 0 odom base_footprint 100

深度图转换为雷达数据
rosrun depthimage_to_laserscan depthimage_to_laserscan image:=/camera/aligned_depth_to_color/image_raw camera_info:=/camera/depth/camera_info range=0.1 range_max=5

保存地图
rosrun map_server map_saver -f rtabmap map:=/rtabmap/grid_map

RTAB-Map 点云滤波、点云分割与地面检测
- 在obstacles_detection.cpp中处理点云回调callback函数,获取frame_ID到cloud_ID的变换关系localTransform,map_ID到frame_ID的变换关系pose,将cloud_ID中的点云转换到frame_ID中:
inputCloud = rtabmap::util3d::transformPointCloud(inputCloud, localTransform);
实际是调用的是下面的函数
pcl::transformPointCloud(*cloud, *output, transform.toEigen4f());
关于这个函数的使用我单独写了可以独立编译运行的程序共学习,代码地址如下:
https://github.com/xiaoqiuslamshizhanjiaocheng/xiaoqiuslamshizhanjiaocheng/blob/main/5_point_cloud/transformPointCloud.cpp
对应目录下有CMakeLists.txt编译文件和table_scene_lms400.pcd点云文件
- 点云由体素网格进行下采样,体素大小等于固定网格单元大小。
然后从点云中分割出地平面:计算点云的法线,然后在固定的最大角度“\Grid/MaxGroundAngle”范围内,所有法线平行于z轴(向上)的点作为地面,其他点则为障碍物。
RTABMAP处理占据栅格地图流程
调用OccupancyGrid.hpp中segmentCloud函数实现地面和障碍物点云分割的功能:
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud = grid_.segmentCloud<pcl::PointXYZ>(
inputCloud,
pcl::IndicesPtr(new std::vector<int>),
pose,
cv::Point3f(localTransform.x(), localTransform.y(), localTransform.z()),
ground,
obstacles,
&flatObstacles);
先根据位姿pose(frame_ID机器人帧在map_ID地图帧坐标系中的位姿)将姿态分解成欧拉角rpy,仅使用roll和pitch对点云(frame_ID机器人帧中的坐标)进行坐标转换(projMapFrame为false,不使用位移相关信息,本质上还是在frame_ID机器人帧),然后调用util3d_mapping.hpp中segmentObstaclesFromGround函数来实现分割:
util3d::segmentObstaclesFromGround<PointT>(
cloud,
indices,
groundIndices,
obstaclesIndices,
normalKSearch_,
maxGroundAngle_,
clusterRadius_,
minClusterSize_,
flatObstaclesDetected_,
maxGroundHeight_,
flatObstacles,
Eigen::Vector4f(viewPoint.x, viewPoint.y, viewPoint.z+(projMapFrame_?pose.z():0), 1));
其中,viewPoint是cloud_ID(相机帧)在frame_ID(机器人帧)坐标系中的坐标。
调用util3d_filtering.cpp中normalFiltering函数分割地面:
pcl::IndicesPtr flatSurfaces = normalFiltering(
cloud,
indices,
groundNormalAngle,
Eigen::Vector4f(0,0,1,0),
normalKSearch,
viewPoint);
实际是调用normalFilteringImpl函数实现:
normalFilteringImplpcl::PointXYZ(cloud, indices, angleMax, normal, normalKSearch, viewpoint);
点云分割与地面检测:
OccupancyGrid.hpp – segmentCloud函数
对点云进行体素化与降采样。调用pcl的setLeafSize()实现。
• rtabmap: cloud_voxel_size: 0.05f, gridCellSize = 0.05f. ICP配准中没有启用voxel(parameters.h)
根据当前位姿,将点云从相机坐标系转换至世界坐标系。
• 调用rtabmap的util3d::transformPointCloud()实现。
机器人范围检测与环境高度检测
• 分别采用util3d::cropBox和util3d::passThrough方法实现,在util3d_filtering.cpp中。
检测地面点云
• util3d::segmentObstaclesFromGround,来自util3d_mapping.hpp
• 使用util3d::normalFitering方法滤波获取地面点云,指标为点的法线与向量(0,0,1)的夹角大小,默认值为45°。首先,通过pcl::NormalEstimationOMP方法,使用KdTree作为搜索方法,并通过setViewPoint方法设置视角,根据公式计算点云所有点的法向量。通过pcl::getAngle3D获得点云每个点法向量与地面垂直向量的夹角。实现方法在util3d_filtering.cpp
• 提取聚类分离地面与平坦障碍物,方法为util3d::extractClusters,来自util3d_filtering.cpp。具体算法为pcl::EuclideanClusterExtraction
对地面点云滤波,分离地面与非地面点云
通过地面与障碍物高度排除三维空间外点,采用passThrough直通滤波器方法滤波,从之前的步骤获取这两种点云的下标值。或者通过cropbox方法直接通过移动机器人footprint范围来排除三维空间外点。
生成栅格地图
• util3d::occupancy2DFromGroundObstacles,来自util3d_mapping.cpp
点云分割与地面检测:
OccupancyGrid.hpp -- segmentCloud函数
对点云进行体素化与降采样。调用pcl的setLeafSize()实现。
rtabmap: cloud_voxel_size: 0.05f, gridCellSize = 0.05f. ICP配准中没有启用voxel(parameters.h)
根据当前位姿,将点云从相机坐标系转换至世界坐标系。
调用rtabmap的util3d::transformPointCloud()实现。
机器人范围检测与环境高度检测
分别采用util3d::cropBox和util3d::passThrough方法实现,在util3d_filtering.cpp中。
检测地面点云
util3d::segmentObstaclesFromGround,来自util3d_mapping.hpp
使用util3d::normalFitering方法滤波获取地面点云,指标为与垂直法向量的夹角大小,默认值为45°。首先,通过pcl::NormalEstimationOMP方法,使用KdTree作为搜索方法,并通过setViewPoint方法设置视角,根据公式计算点云所有点的法向量。通过pcl::getAngle3D获得点云每个点法向量与地面垂直向量的夹角。实现方法在util3d_filtering.cpp
提取聚类分离地面与平坦障碍物,方法为util3d::extractClusters,来自util3d_filtering.cpp。具体算法为pcl::EuclideanClusterExtraction
对地面点云滤波,分离地面与非地面点云
通过地面与障碍物高度排除三维空间外点,采用passThrough直通滤波器方法滤波,从之前的步骤获取这两种点云的下标值
//setNegative: 在min与max范围内的被保留。minGroundHeight为min输入,maxObstacleHeight为max输入
pcl::PointCloud<pcl::PointXYZRGB>::Ptr passThrough(
const pcl::PointCloud<pcl::PointXYZRGB>::Ptr & cloud,
const std::string & axis,
float min,
float max,
bool negative)
{
UASSERT(max > min);
UASSERT(axis.compare("x") == 0 || axis.compare("y") == 0 || axis.compare("z") == 0);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr output(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::PassThrough<pcl::PointXYZRGB> filter;
filter.setNegative(negative);
filter.setFilterFieldName(axis);
filter.setFilterLimits(min, max);
filter.setInputCloud(cloud);
filter.filter(*output);
return output;
}
或者通过cropbox方法直接通过移动机器人footprint范围来排除三维空间外点
生成栅格地图
util3d::occupancy2DFromGroundObstacles,来自util3d_mapping.cpp
参考链接
RTABMAP-ROS RGB-D的建图原理
RTAB-MAP原理详解
rtabmap
rtabmap
official-rtab-map-forum
rtabmap_ros
rtabmap_ros
https://github.com/introlab/rtabmap/wiki/Installation
https://github.com/introlab/rtabmap_ros#installation
http://wiki.ros.org/rtabmap_ros
http://official-rtab-map-forum.67519.x6.nabble.com/
http://wiki.ros.org/rtabmap_ros/Tutorials/HandHeldMapping
http://wiki.ros.org/camera_calibration/Tutorials/StereoCalibration
http://wiki.ros.org/camera_calibration
http://wiki.ros.org/rtabmap_ros/Tutorials/StereoHandHeldMapping
http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot#Stereo_A