ROS自主导航学习———ROS通信机制
前言
前面ROS很多都忘记了 ,现在来重新回顾一下内容
ROS 中的基本通信机制主要有如下三种实现策略:
-
话题通信(发布订阅模式)
-
服务通信(请求响应模式)
-
参数服务器(参数共享模式)
-
Action通信
ROS常用API
第 3 章 ROS通信机制进阶 · GitBook http://www.autolabor.com.cn/book/ROSTutorials/di-3-zhang-ros-tong-xin-ji-zhi-jin-jie.html
http://www.autolabor.com.cn/book/ROSTutorials/di-3-zhang-ros-tong-xin-ji-zhi-jin-jie.html
话题通信(发布订阅模式)
以发布订阅的方式实现不同节点之间数据交互的通信模式。
话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (发布者)
- Listener (订阅者)
ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 Listener,帮助 Talker 与 Listener 建立连接,连接建立后,Talker 可以发布消息,且发布的消息会被 Listener 订阅
ROS中的通信方式中,topic是常用的一种。对于实时性、周期性的消息,使用topic来传输是最佳的选择。topic是一种点对点的单向通信方式,这里的“点”指的是node,也就是说node之间可以通过topic方式来传递信息。topic要经历下面几步的初始化过程:首先,publisher节点和subscriber节点都要到节点管理器进行注册,然后publisher会发布topic,subscriber在master的指挥下会订阅该topic,从而建立起sub-pub之间的通信。注意整个过程是单向的。
其中在话题通信中值得注意的是
- Subscriber接收消息会进行处理,一般这个过程叫做回调(Callback)。所谓回调就是提前定义好了一个处理函数(写在代码中),当有消息来就会触发这个处理函数,函数会对消息进行处理
- ROS是一种分布式的架构,一个topic可以被多个节点同时发布,也可以同时被多个节点接收。
话题通信的基本操作
代码
//topic_pub1.cpp
#include"ros/ros.h"
#include
#include
int main(int args ,char *argv[])
{
//设置编码 会在终端输出信息 防止乱码
setlocale(LC_ALL,"");
//初始化 ROS 节点:命名(唯一) 节点命名不能重复
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(args,argv,"talker");
//实例化句柄该类封装了 ROS 中的一些常用功能
ros::NodeHandle nh;
//实例化 发布者 对象
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
//n.advertise通过NodeHandle的对象n告诉ROS系统我要创建一个可以发布信息的对象了。这个信息是什么类型的呢?
//告诉ROS我要发布的是标准信息中的String类型。
//那些信息叫啥名字呢?名字叫chatter。这个chatter就是我们之前提到的topic!
ros::Publisher pub=nh.advertise("chatter",10);
std_msgs::String msg;
std::string msg_fromt="day day up";
int count =0; //计数器
//逻辑(一秒10次) 可以制定循环的频率
//程序如果在不断地发布信息,那么有时候我会想控制发布的信息的快慢,这行表示你希望你发布信息的速度为10Hz。
//这个函数要和ros::Rate r.sleep()配合使用才能达到控制速度目的
ros::Rate r(10);
while(ros::ok())
{
std::stringstream ss;
ss< //topic_sub1.cpp
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h"
void doMsg(const std_msgs::String::ConstPtr& msg_p){
ROS_INFO("我听见:%s",msg_p->data.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
ros::init(argc,argv,"listener");
//3.实例化 ROS 句柄
ros::NodeHandle nh;
//4.实例化 订阅者 对象
ros::Subscriber sub = nh.subscribe("chatter",10,doMsg);
//5.处理订阅的消息(回调函数)
// 6.设置循环调用回调函数
ros::spin();//循环读取接收的数据,并调用回调函数处理
return 0;
} 

话题通信自定义msg
ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty.... 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息... std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型
其中 ros::spin() 是进入了循环执行回调函数,而 ros::spinOnce() 只会执行一次回调函数(没有循环),在 ros::spin() 后的语句不会执行到,而 ros::spinOnce() 后的语句可以执行
功能包下新建 msg 目录,添加文件 Person.msg
string name
uint16 age
float64 height#include"ros/ros.h"
#include
#include "Topic/Person.h"
#include
int main(int args ,char *argv[])
{
//设置编码 会在终端输出信息 防止乱码
setlocale(LC_ALL,"");
//初始化 ROS 节点:命名(唯一) 节点命名不能重复
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(args,argv,"person_talker");
//实例化句柄该类封装了 ROS 中的一些常用功能
ros::NodeHandle nh;
//实例化 发布者 对象
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
//n.advertise通过NodeHandle的对象n告诉ROS系统我要创建一个可以发布信息的对象了。这个信息是什么类型的呢?
//告诉ROS我要发布的是标准信息中的String类型。
//那些信息叫啥名字呢?名字叫chatter。这个chatter就是我们之前提到的topic!
ros::Publisher pub=nh.advertise("person_chatter",10);
Topic::Person p;
p.name="xxd";
p.age=10;
p.height=1.78;
int count =0; //计数器
//逻辑(一秒10次) 可以制定循环的频率
//程序如果在不断地发布信息,那么有时候我会想控制发布的信息的快慢,这行表示你希望你发布信息的速度为10Hz。
//这个函数要和ros::Rate r.sleep()配合使用才能达到控制速度目的
ros::Rate r(10);
while(ros::ok())
{
//发布消息
pub.publish(p);
p.age += 1;
ROS_INFO("我叫:%s,今年%d岁,高%.2f米", p.name.c_str(), p.age, p.height);
r.sleep();
//回调函数
ros::spinOnce();
}
return 0;
} // 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "Topic/Person.h"
void doMsg(const Topic::Person::ConstPtr& person_p){
ROS_INFO("我听见:%s",person_p->name.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
ros::init(argc,argv,"person_listener");
//3.实例化 ROS 句柄
ros::NodeHandle nh;
ROS_INFO("hello");
//4.实例化 订阅者 对象
ros::Subscriber sub = nh.subscribe("person_chatter",10,doMsg);
ROS_INFO("hello2");
// 5.设置循环调用回调函数
ros::spin();
ROS_INFO("hello3");
return 0;
} 服务通信
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。
Service通信是双向的,它不仅可以发送消息,同时还会有反馈。所以service包括两部分,一部分是请求方(Clinet),另一部分是应答方/服务提供方(Server)。这时请求方(Client)就会发送一个request,要等待server处理,反馈回一个reply,这样通过类似“请求-应答”的机制完成整个服务通信
代码
服务通信中,客户端提交两个整数至服务端,服务端求和并响应结果到客户端,请创建服务器与客户端通信的数据载体。
#include "ros/ros.h"
#include "Topic/AddInts.h"
// bool 返回值由于标志是否处理成功
bool doReq(Topic::AddInts::Request& req,
Topic::AddInts::Response& resp){
int num1 = req.num1;
int num2 = req.num2;
ROS_INFO("服务器接收到的请求数据为:num1 = %d, num2 = %d",num1, num2);
//逻辑处理
if (num1 < 0 || num2 < 0)
{
ROS_ERROR("提交的数据异常:数据不可以为负数");
return false;
}
//如果没有异常,那么相加并将结果赋值给 resp
resp.sum = num1 + num2;
return true;
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"AddInts_Server");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建 服务 对象
ros::ServiceServer server = nh.advertiseService("AddInts",doReq);
ROS_INFO("服务已经启动....");
// 5.回调函数处理请求并产生响应
// 6.由于请求有多个,需要调用 ros::spin()
ros::spin();
return 0;
}#include "ros/ros.h"
#include "Topic/AddInts.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 调用时动态传值,如果通过 launch 的 args 传参,需要传递的参数个数 +3
if (argc != 3)
// if (argc != 5)//launch 传参(0-文件路径 1传入的参数 2传入的参数 3节点名称 4日志路径)
{
ROS_ERROR("请提交两个整数");
return 1;
}
// 2.初始化 ROS 节点
ros::init(argc,argv,"AddInts_Client");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建 客户端 对象
ros::ServiceClient client = nh.serviceClient("AddInts");
//等待服务启动成功
ros::service::waitForService("AddInts");
Topic::AddInts add;
add.request.num1=atoi(argv[1]);
add.request.num2=atoi(argv[2]);
bool flag=client.call(add);
if (flag)
{
ROS_INFO("请求正常处理,响应结果:%d",add.response.sum);
}
else
{
ROS_ERROR("请求处理失败....");
return 1;
}
return 0;
}

流程:
-
需要先启动服务:
rosrun 包名 服务 -
然后再调用客户端 :
rosrun 包名 客户端 参数1 参数2
参数服务器
参数服务器也可以说是特殊的“通信方式”。特殊点在于参数服务器是节点存储参数的地方、用于配置参数,全局共享参数。参数服务器使用互联网传输,在节点管理器中运行,实现整个通信过程。
在 C++ 中实现参数服务器数据的增删改查,可以通过两套 API 实现:
-
ros::NodeHandle
-
ros::param
代码
//param_add.cpp
#include
int main(int argc,char *argv[])
{
ros::init(argc,argv,"set_update_param");
std::vector stus;
stus.push_back("xxd");
stus.push_back("李四");
stus.push_back("王五");
stus.push_back("123");
std::map friends;
friends["guo"] = "huang";
friends["yuang"] = "xiao";
ros::NodeHandle nh;
nh.setParam("nh_int",10);
nh.setParam("nh_double",3.14);
nh.setParam("nh_bool",true);
nh.setParam("nh_string","hello NodeHandle"); //字符串
nh.setParam("nh_vector",stus); // vector
nh.setParam("nh_map",friends); // map
//修改
nh.setParam("nh_int",10000);
//param--------------------------------------------------------
ros::param::set("param_int",20);
ros::param::set("param_double",3.14);
ros::param::set("param_string","Hello Param");
ros::param::set("param_bool",false);
ros::param::set("param_vector",stus);
ros::param::set("param_map",friends);
ros::param::set("param_int",20000);
return 0;
} //param_get.cpp
#include "ros/ros.h"
/*
param(键,默认值)
存在,返回对应结果,否则返回默认值
getParam(键,存储结果的变量)
存在,返回 true,且将值赋值给参数2
若果键不存在,那么返回值为 false,且不为参数2赋值
getParamCached键,存储结果的变量)--提高变量获取效率
存在,返回 true,且将值赋值给参数2
若果键不存在,那么返回值为 false,且不为参数2赋值
getParamNames(std::vector)
获取所有的键,并存储在参数 vector 中
hasParam(键)
是否包含某个键,存在返回 true,否则返回 false
searchParam(参数1,参数2)
搜索键,参数1是被搜索的键,参数2存储搜索结果的变量
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"get_param");
ROS_INFO("++++++++++++++++++++++++++++++++++++++++");
int res3 = ros::param::param("param_int",20); //存在
int res4 = ros::param::param("param_int2",20); // 不存在返回默认
ROS_INFO("param获取结果:%d,%d",res3,res4);
int param_int_value;
double param_double_value;
bool param_bool_value;
std::string param_string_value;
std::vector param_stus;
std::map param_friends;
ros::param::get("param_int",param_int_value);
ros::param::get("param_double",param_double_value);
ros::param::get("param_bool",param_bool_value);
ros::param::get("param_string",param_string_value);
ros::param::get("param_vector",param_stus);
ros::param::get("param_map",param_friends);
ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",
param_int_value,
param_double_value,
param_string_value.c_str(),
param_bool_value
);
for(auto &&stu:param_stus){
ROS_INFO("stus 元素:%s",stu.c_str());
}
for (auto &&f : param_friends)
{
ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());
}
ros::param::getCached("param_int",param_int_value);
ROS_INFO("通过缓存获取数据:%d",param_int_value);
//getParamNames()
std::vector param_names2;
ros::param::getParamNames(param_names2);
for (auto &&name : param_names2)
{
ROS_INFO("名称解析name = %s",name.c_str());
}
ROS_INFO("----------------------------");
ROS_INFO("存在 param_int 吗? %d",ros::param::has("param_int"));
ROS_INFO("存在 param_intttt 吗? %d",ros::param::has("param_intttt"));
std::string key;
ros::param::search("param_int",key);
ROS_INFO("搜索键:%s",key.c_str());
return 0;
} //param_del.cpp
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"delete_param");
ros::NodeHandle nh;
bool r1 = nh.deleteParam("nh_int");
ROS_INFO("nh 删除结果:%d",r1);
bool r2 = ros::param::del("param_int");
ROS_INFO("param 删除结果:%d",r2);
return 0;
}
action通信
ROS中有一个名为actionlib的功能包,实现了action的通信机制。
action是一种类似于Service的问答通信机制,不同之处在于action带有连续反馈,可以不断反馈任务进度,也可以在任务过程中中止运行。
我们使用action来发布一个机器人的运动目标,机器人接到这个action后,就开始运动,在运动过程中不断反馈当前的运动状态,在运动过程中我们可以取消运动,让机器人停止,如果机器人完成了运动目标,那么action会返回任务完成的标志
想要创建一个action,首先需要在action定义文件中定义三个消息格式,分别是:目标,结果,反馈

- goal:任务目标
- cancel:请求取消任务
- status:通知client当前的状态
- feedback:周期反馈任务运行的监控数据
- result:向client发送任务的执行结果,这个topic只会发布一次。
#include
#include
typedef actionlib::SimpleActionClient Client;
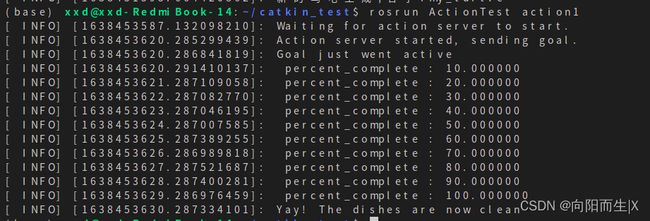
void doneCb(const actionlib::SimpleClientGoalState& state,const ActionTest::AddIntsResultConstPtr &result)
{
ROS_INFO("Yay! The dishes are now clean");
ros::shutdown();
}
void activeCb()
{
ROS_INFO("Goal just went active");
}
void feedbackCb(const ActionTest::AddIntsFeedbackConstPtr& feedback)
{
ROS_INFO(" percent_complete : %f ", feedback->percent_complete);
}
int main(int argc, char** argv)
{
ros::init(argc,argv,"action_test");
Client client("do_action",true);
ROS_INFO("Waiting for action server to start.");
client.waitForServer();
ROS_INFO("Action server started, sending goal.");
ActionTest::AddIntsGoal goal;
goal.dishwasher_id=1;
// 发送action的goal给服务器端,并且设置回调函数
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
ros::spin();
return 0;
} #include
#include
#include "ActionTest/AddIntsAction.h"
typedef actionlib::SimpleActionServer Server;
void execute(const ActionTest::AddIntsGoalConstPtr &goal ,Server *as)
{
ros::Rate r(1);
ActionTest::AddIntsFeedback feedback;
ROS_INFO("Dishwasher %d is working.", goal->dishwasher_id);
// 按照1hz的频率发布进度feedback
for(int i=1; i<=10; i++)
{
feedback.percent_complete = i * 10;
as->publishFeedback(feedback);
r.sleep();
}
// 当action完成后,向客户端返回结果
ROS_INFO("Dishwasher %d finish working.", goal->dishwasher_id);
as->setSucceeded();
}
int main (int argc,char *argv[])
{
ros::init(argc,argv,"action2");
ros::NodeHandle nh;
Server server(nh,"do_action", boost::bind(&execute, _1, &server), false);
server.start();
ros::spin();
} 
通信机制实操
结合已经介绍ROS命令获取节点、话题、话题消息、服务、服务消息与参数的信息,最终再以编码的方式实现乌龟运动的控制、乌龟位姿的订阅、乌龟生成与乌龟窗体背景颜色的修改
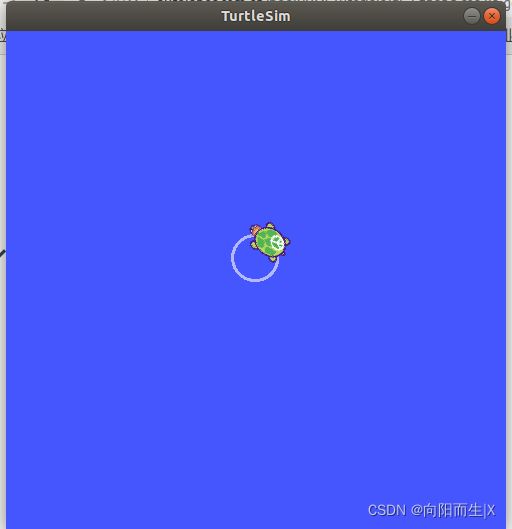
话题发布
编码实现乌龟运动控制,让小乌龟做圆周运动
/*
编写 ROS 节点,控制小乌龟画圆
准备工作:
1.获取topic(已知: /turtle1/cmd_vel)
2.获取消息类型(已知: geometry_msgs/Twist)
3.运行前,注意先启动 turtlesim_node 节点
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建发布者对象
4.循环发布运动控制消息
*/
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"control");
ros::NodeHandle nh;
// 3.创建发布者对象
ros::Publisher pub = nh.advertise("/turtle1/cmd_vel",1000);
// 4.循环发布运动控制消息
//4-1.组织消息
geometry_msgs::Twist msg;
msg.linear.x = 1.0;
msg.linear.y = 0.0;
msg.linear.z = 0.0;
msg.angular.x = 0.0;
msg.angular.y = 0.0;
msg.angular.z = 2.0;
//4-2.设置发送频率
ros::Rate r(10);
//4-3.循环发送
while (ros::ok())
{
pub.publish(msg);
ros::spinOnce();
}
return 0;
} 
话题订阅
#include "ros/ros.h"
#include "turtlesim/Pose.h"
void doPose(const turtlesim::Pose::ConstPtr& p){
ROS_INFO("乌龟位姿信息:x=%.2f,y=%.2f,theta=%.2f,lv=%.2f,av=%.2f",
p->x,p->y,p->theta,p->linear_velocity,p->angular_velocity
);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"sub_pose");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建订阅者对象
ros::Subscriber sub = nh.subscribe("/turtle1/pose",1000,doPose);
// 5.回调函数处理订阅的数据
// 6.spin
ros::spin();
return 0;
} 
服务调用
#include "ros/ros.h"
#include "turtlesim/Spawn.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ros 节点
ros::init(argc,argv,"set_turtle");
// 3.创建 ros 句柄
ros::NodeHandle nh;
// 4.创建 service 客户端
ros::ServiceClient client = nh.serviceClient("/spawn");
// 5.等待服务启动
// client.waitForExistence();
ros::service::waitForService("/spawn");
// 6.发送请求
turtlesim::Spawn spawn;
spawn.request.x = 1.0;
spawn.request.y = 1.0;
spawn.request.theta = 1.57;
spawn.request.name = "my_turtle";
bool flag = client.call(spawn);
// 7.处理响应结果
if (flag)
{
ROS_INFO("新的乌龟生成,名字:%s",spawn.response.name.c_str());
} else {
ROS_INFO("乌龟生成失败!!!");
}
return 0;
}

通信对比

Reference
机器人操作系统ROS:从入门到放弃(一) 发布接收消息 - 简书
ROS技术点滴 —— action通信 - 知乎
代码 第 2 章 ROS通信机制 · GitBook
赵老师的视频 【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程_哔哩哔哩_bilibili