计算机视觉教程0-4:手推张正友标定法,详解图像去畸变(附代码)

目录
- 1 相机为什么要标定?
- 2 反解相机矩阵
- 3 反解畸变系数
- 4 去畸变原理与实战
1 相机为什么要标定?
直接给结论:相机标定的目的是为了获得相机矩阵和畸变系数。这部分内容可以参考计算机视觉教程0-3:为何拍照会有死亡视角?详解相机矩阵与畸变。获得了相机矩阵和畸变系数后就能进行更高级的应用,主要应用于立体视觉领域,例如视觉SLAM、三维导航、双目测距等,总之,相机标定相当重要。
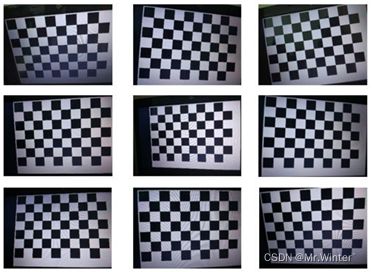
相机标定的经典方法是张正友标定法,需要下面的张正友标定板。本节将详细地从底层数学原理推导张正友标定法。
2 反解相机矩阵
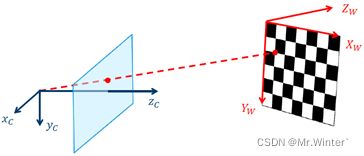
不考虑畸变,对图像中标定板角点进行检测,得到角点像素坐标值 [ u v 1 ] T \left[ \begin{matrix} u& v& 1\\\end{matrix} \right] ^T [uv1]T,根据已知棋盘格大小,计算世界坐标系下标定板角点的世界坐标值 [ W X W Y W Z 1 ] T \left[ \begin{matrix} ^{\boldsymbol{W}\!}\!X& ^{\boldsymbol{W}\!}\!\!\:\!\:Y& ^{\boldsymbol{W}\!}\!Z& 1\\\end{matrix} \right] ^T [WXWYWZ1]T,此时从世界坐标到像素坐标的映射为
[ u ^ v ^ 1 ] = K [ W C R C p w 0 ] [ W X W Y W Z 1 ] \left[ \begin{array}{c} \hat{u}\\ \hat{v}\\ 1\\\end{array} \right] =\boldsymbol{K}\left[ \begin{matrix} _{\boldsymbol{W}}^{\boldsymbol{C}}\;\!\!\!\boldsymbol{R}& ^{\boldsymbol{C}}\!\boldsymbol{p}_{w_0}\\\end{matrix} \right] \left[ \begin{array}{c} ^{\boldsymbol{W}\!}\!X\\ ^{\boldsymbol{W}\!}\!\!\:\!\:Y\\ ^{\boldsymbol{W}\!}\!Z\\ 1\\\end{array} \right] ⎣⎡u^v^1⎦⎤=K[WCRCpw0]⎣⎢⎢⎡WXWYWZ1⎦⎥⎥⎤
通常将世界坐标系与标定板固连使 W Z = 0 ^{\boldsymbol{W}\!}\!Z=0 WZ=0,如图所示
此时映射关系简化为
[ u ^ v ^ 1 ] = K [ r 1 r 2 p ] [ W X W Y 1 ] \left[ \begin{array}{c} \hat{u}\\ \hat{v}\\ 1\\\end{array} \right] =\boldsymbol{K}\left[ \begin{matrix} \boldsymbol{r}_1& \boldsymbol{r}_2& \boldsymbol{p}\\\end{matrix} \right] \left[ \begin{array}{c} ^{\boldsymbol{W}\!}\!X\\ ^{\boldsymbol{W}\!}\!\!\:\!\:Y\\ 1\\\end{array} \right] ⎣⎡u^v^1⎦⎤=K[r1r2p]⎣⎡WXWY1⎦⎤
其中 r 1 \boldsymbol{r}_1 r1、 r 2 \boldsymbol{r}_2 r2是旋转矩阵 W C R _{\boldsymbol{W}}^{\boldsymbol{C}}\;\!\!\!\boldsymbol{R} WCR的前两列。
设从标定板到成像平面的单应性矩阵为
H = [ h 11 h 12 h 13 h 21 h 22 h 23 h 31 h 32 h 33 ] = [ h 1 h 2 h 3 ] \boldsymbol{H}=\left[ \begin{matrix} h_{11}& h_{12}& h_{13}\\ h_{21}& h_{22}& h_{23}\\ h_{31}& h_{32}& h_{33}\\\end{matrix} \right] =\left[ \begin{matrix} \boldsymbol{h}_1& \boldsymbol{h}_2& \boldsymbol{h}_3\\\end{matrix} \right] H=⎣⎡h11h21h31h12h22h32h13h23h33⎦⎤=[h1h2h3]
这部分内容可以参考计算机视觉教程1-2:单应性矩阵估计
下面基于已知的 H \boldsymbol{H} H反解内参矩阵 K \boldsymbol{K} K,代入 h i = K r i ( i = 1 , 2 ) \boldsymbol{h}_i=\boldsymbol{Kr}_i\left( i=1,2 \right) hi=Kri(i=1,2)可得
{ h 1 T Q h 2 = 0 h 1 T Q h 1 = h 2 T Q h 2 = 1 \begin{cases} \boldsymbol{h}_{1}^{T}\boldsymbol{Qh}_2=0\\ \boldsymbol{h}_{1}^{T}\boldsymbol{Qh}_1=\boldsymbol{h}_{2}^{T}\boldsymbol{Qh}_2=1\\\end{cases} {h1TQh2=0h1TQh1=h2TQh2=1
其中对称矩阵 Q = K − T K − 1 \boldsymbol{Q}=\boldsymbol{K}^{-T}\boldsymbol{K}^{-1} Q=K−TK−1
考虑到
h i T Q h j = [ h i 1 h i 2 h i 3 ] [ q 1 q 2 q 3 q 2 q 4 q 5 q 3 q 5 q 6 ] [ h j 1 h j 2 h j 3 ] = v i j T q \boldsymbol{h}_{i}^{T}\boldsymbol{Qh}_j=\left[ \begin{matrix} h_{i1}& h_{i2}& h_{i3}\\\end{matrix} \right] \left[ \begin{matrix} q_1& q_2& q_3\\ q_2& q_4& q_5\\ q_3& q_5& q_6\\\end{matrix} \right] \left[ \begin{array}{c} h_{j1}\\ h_{j2}\\ h_{j3}\\\end{array} \right] \\=\boldsymbol{v}_{ij}^{T}\boldsymbol{q} hiTQhj=[hi1hi2hi3]⎣⎡q1q2q3q2q4q5q3q5q6⎦⎤⎣⎡hj1hj2hj3⎦⎤=vijTq
可以改写为
[ v 12 T v 11 T − v 22 T ] q = 0 \left[ \begin{array}{c} \boldsymbol{v}_{12}^{T}\\ \boldsymbol{v}_{11}^{T}-\boldsymbol{v}_{22}^{T}\\\end{array} \right] \boldsymbol{q}=0 [v12Tv11T−v22T]q=0
其中矩阵 V \boldsymbol{V} V完全由已知的 H \boldsymbol{H} H导出, q \boldsymbol{q} q为 Q \boldsymbol{Q} Q的向量形式。由于一个 H \boldsymbol{H} H最多只能贡献两个线性方程,因此确定内参矩阵至少要3张标定板(工程上一般取15~20张为宜),这些方程共同构成 V q = 0 \boldsymbol{Vq}=0 Vq=0,可用计算机视觉教程1-2:单应性矩阵估计的基本DLT算法解算,解出来就是相机内参矩阵。
3 反解畸变系数
张氏标定法仅考虑畸变中影响较大的径向畸变而忽略切向畸变,用求得的内参矩阵反解畸变参数。
设无畸变像素坐标、成像平面坐标分别为 [ u ^ v ^ ] T \left[ \begin{matrix} \hat{u}& \hat{v}\\\end{matrix} \right] ^T [u^v^]T、 [ x ^ y ^ ] T \left[ \begin{matrix} \hat{x}& \hat{y}\\\end{matrix} \right] ^T [x^y^]T;有畸变像素坐标、成像平面坐标分别为 [ u v ] T \left[ \begin{matrix} u& v\\\end{matrix} \right] ^T [uv]T、 [ x y ] T \left[ \begin{matrix} x& y\\\end{matrix} \right] ^T [xy]T;设内参 s = 0 s=0 s=0,则
{ u = f u x + c u v = f v y + c v { u ^ = f u x ^ + c u v ^ = f v y ^ + c v \begin{cases} u=f_ux+c_u\\ v=f_vy+c_v\\\end{cases}\,\, \begin{cases} \hat{u}=f_u\hat{x}+c_u\\ \hat{v}=f_v\hat{y}+c_v\\\end{cases} {u=fux+cuv=fvy+cv{u^=fux^+cuv^=fvy^+cv
两式相减,并代入 f u x = u − c u f_ux=u-c_u fux=u−cu、 f v y = v − c v f_vy=v-c_v fvy=v−cv以及径向畸变公式
{ x ^ = x ( 1 + κ 1 r 2 + κ 2 r 4 ) y ^ = y ( 1 + κ 1 r 2 + κ 2 r 4 ) \begin{cases} \hat{x}=x\left( 1+\kappa _1r^2+\kappa _2r^4 \right)\\ \hat{y}=y\left( 1+\kappa _1r^2+\kappa _2r^4 \right)\\\end{cases} {x^=x(1+κ1r2+κ2r4)y^=y(1+κ1r2+κ2r4)
即得
[ ( u − c u ) r 2 ( u − c u ) r 4 ( v − c v ) r 2 ( v − c v ) r 4 ] [ κ 1 κ 2 ] = [ u ^ − u v ^ − v ] \left[ \begin{matrix} \left( u-c_u \right) r^2& \left( u-c_u \right) r^4\\ \left( v-c_v \right) r^2& \left( v-c_v \right) r^4\\\end{matrix} \right] \left[ \begin{array}{c} \kappa _1\\ \kappa _2\\\end{array} \right] =\left[ \begin{array}{c} \hat{u}-u\\ \hat{v}-v\\\end{array} \right] [(u−cu)r2(v−cv)r2(u−cu)r4(v−cv)r4][κ1κ2]=[u^−uv^−v]
考虑到
[ u ^ v ^ 1 ] = K [ W C R C p w 0 ] [ W X W Y W Z 1 ] \left[ \begin{array}{c} \hat{u}\\ \hat{v}\\ 1\\\end{array} \right] =\boldsymbol{K}\left[ \begin{matrix} _{\boldsymbol{W}}^{\boldsymbol{C}}\;\!\!\!\boldsymbol{R}& ^{\boldsymbol{C}}\!\boldsymbol{p}_{w_0}\\\end{matrix} \right] \left[ \begin{array}{c} ^{\boldsymbol{W}\!}\!X\\ ^{\boldsymbol{W}\!}\!\!\:\!\:Y\\ ^{\boldsymbol{W}\!}\!Z\\ 1\\\end{array} \right] ⎣⎡u^v^1⎦⎤=K[WCRCpw0]⎣⎢⎢⎡WXWYWZ1⎦⎥⎥⎤
对于 M M M幅标定板图片,每张图片取 N N N个角点,则可构造非齐次线性方程
D 2 M N × 2 κ = d 2 M N × 1 \boldsymbol{D}_{2MN\times 2}\boldsymbol{\kappa }=\boldsymbol{d}_{2MN\times 1} D2MN×2κ=d2MN×1
其中 κ = [ κ 1 κ 2 ] T \boldsymbol{\kappa }=\left[ \begin{matrix} \kappa _1& \kappa _2\\\end{matrix} \right] ^T κ=[κ1κ2]T即为畸变系数。通过最小二乘法进行回归
κ = ( D T D ) − 1 D T d {\boldsymbol{\kappa }=\left( \boldsymbol{D}^T\boldsymbol{D} \right) ^{-1}\boldsymbol{D}^T\boldsymbol{d}} κ=(DTD)−1DTd
即得畸变系数
4 去畸变原理与实战
综合上面两节,给出去畸变的原理
- 准备张氏标定法的标准棋盘格,用相机对其进行不同角度拍摄,得到一组图像
- 忽略畸变,每张标定板可通过世界坐标与像素坐标的关系,求解二者间的单应性矩阵,用于反解相机内参矩阵;忽略切向畸变与内参矩阵误差,反解径向畸变参数
- 利用L-M(Levenberg Marquardt)等非线性迭代优化算法对上述参数进行优化,得到最终的内参矩阵与畸变参数。
按照上面的原理,我们将相机标定与去畸变的代码写出来
/*
* @breif:采用张氏标定法标定相机并生成标定文件.txt
* @param[in]:folderPath->标定板图像集的文件夹路径;
* @param[in]:boardSize->标定板上每行、列的内角点数;
* @param[in]:realSizePerBox->实际测量的标定板棋盘格几何尺寸,与相机矩阵单位pix/mm对应,Unit:mm;
* @param[in]:savePath->标定文件.txt的保存路径;
* @retval:None
*/
void cameraCalibration(String folderPath, Size boardSize, Size realSizePerBox, String savePath)
{
std::vector<cv::String> fileNames; // 存放标定图片文件名的序列
cv::glob(folderPath, fileNames); // 将标定文件夹中的文件名读取到序列
Mat cameraMatrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); // 像机内参矩阵
Mat distCoeffs = Mat(1, 5, CV_32FC1, Scalar::all(0)); // 像机畸变系数:k1,k2,p1,p2,k3
vector<Mat> tvecsMat; // 相机外参->旋转向量
vector<Mat> rvecsMat; // 相机外参->平移向量
int imgCnt = 0; // 图像数量
vector<int> ptCnt; // 图像中角点的数量
Size imgSize; // 图像尺寸
vector<Point2f> imgPtBuffer; // 缓存每幅图像上检测到的角点
vector<vector<Point2f>> imgPtSequence; // 检测到的所有角点序列,Unit:pix
vector<vector<Point3f>> realImgPtSequence; // 检测到的所有角点序列,Unit:mm
double totalErr = 0.0; // 所有图像的重投影误差和
/*========================================= 像素平面角点坐标提取 =========================================================*/
for (size_t i = 0; i < fileNames.size(); ++i)
{
imgCnt++;
printf("read the number %d image\n", i+1);
Mat imgInput = imread(fileNames[i]);
ptCnt.push_back(boardSize.width * boardSize.height); // 初始化每幅图像中的角点数量,假定每幅图像中都可看到完整标定板
if (imgCnt == 1) //读入第一张图片时获取图像宽高信息
{
imgSize.width = imgInput.cols;
imgSize.height = imgInput.rows;
}
if (findChessboardCorners(imgInput, boardSize, imgPtBuffer) == 0) // 提取ChessBoard类型角点
{
printf("can't find the corner point of image number %d, please check!\n", i);
return;
}
else
{
Mat imgGray;
cvtColor(imgInput, imgGray, CV_RGB2GRAY); //图像灰度化
find4QuadCornerSubpix(imgGray, imgPtBuffer, Size(11, 11)); //对粗提取的角点进行亚像素精确化
imgPtSequence.push_back(imgPtBuffer);
}
}
/*========================================= 几何平面角点坐标提取 =========================================================*/
for (int i = 0; i < imgCnt; i++)
{
vector<Point3f> tempPtSetPerImg;
for (int j = 0; j < boardSize.height; j++)
{
for (int k = 0; k < boardSize.width; k++)
{
Point3f realPoint;
realPoint.x = j * realSizePerBox.width;
realPoint.y = k * realSizePerBox.height;
realPoint.z = 0; // 张氏标定法假设标定板放在世界坐标系中z=0的平面上
tempPtSetPerImg.push_back(realPoint);
}
}
realImgPtSequence.push_back(tempPtSetPerImg);
}
/*======================================== 相机标定与重投影误差计算 ======================================================*/
calibrateCamera(realImgPtSequence, imgPtSequence, imgSize, cameraMatrix, distCoeffs, rvecsMat, tvecsMat);
totalErr = calReprojectErr(realImgPtSequence, imgPtSequence, rvecsMat, tvecsMat, cameraMatrix, distCoeffs, ptCnt);
}
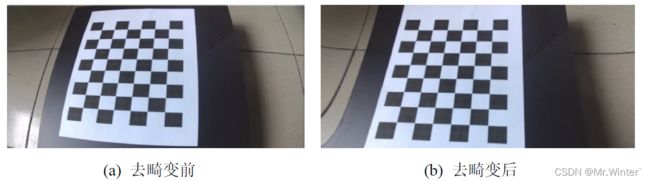
看看效果,只看标定格:
计算机视觉基础教程说明
章号 内容
0 色彩空间与数字成像
1 计算机几何基础
2 图像增强、滤波、金字塔
3 图像特征提取
4 图像特征描述
5 图像特征匹配
6 立体视觉
7 项目实战
更多精彩专栏:
- 《机器人原理与技术》
- 《计算机视觉教程》
- 《机器学习》
- 《嵌入式系统》
- 《数值优化方法》
- …
欢迎加入社区和更多志同道合的朋友交流:AI 技术社