matlab滤波后nan,用一阶滤波和卡尔曼滤波解算姿态角时结果为nan
尝试用arduino和simulink制作两轮自平衡小车。 现在可以读到MPU6050的六轴原始数据了,想用MATLAB Function解算出俯仰角。由于无论是一阶滤波方法还是卡尔曼滤波方法都是迭代出结果的,需要用到全局变量。但是输出的结果始终是nan。
求助如何解决?
下面是程序:
一阶滤波:
function y = fcn(acc, gyro)
%#codegen
global angle1;
K1 =0.1;
dt = 0.005;
angle_m = atan(acc(1)/acc(3))*57.3;
gyro_m = -gyro(2)/16.4;
angle1 = K1 * angle_m + (1-K1) * (angle1 + gyro_m * dt);
y = angle1;
卡尔曼滤波:
function [y, angle_dot] = fcn(acc, gyro)
%#codegen
global anglek;
global q_bias;
global P;
global Pdot;
Q_angle=0.001;
Q_gyro=0.003;
C_0 = 1;
R_angle=0.5;
dt=0.005;
angle_m = atan(acc(1)/acc(3))*57.3;
gyro_m = -gyro(2)/16.4;
anglek = anglek + (gyro_m - q_bias) * dt;
angle_err = angle_m - anglek;
Pdot(1)=Q_angle - P(1,2) - P(2,1);
Pdot(2) = -P(2,2);
Pdot(3) = -P(2,2);
Pdot(4)= Q_gyro;
P(1,1) = P(1,1)+Pdot(1) * dt;
P(1,2) = P(1,2)+Pdot(2) * dt;
P(2,1) = P(2,1)+Pdot(3) * dt;
P(2,2) = P(2,2)+Pdot(4) * dt;
PCt_0 = C_0 * P(1,1);
PCt_1 = C_0 * P(2,1);
E = R_angle + C_0 * PCt_0;
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
t_0 = PCt_0;
t_1 = C_0 * P(1,2);
P(1,1) = P(1,1)-K_0 * t_0;
P(1,2) = P(1,2)-K_0 * t_1;
P(2,1) = P(2,1)-K_1 * t_0;
P(2,2) = P(2,2)-K_1 * t_1;
anglek = anglek+K_0 * angle_err; %最优角度
q_bias = q_bias+K_1 * angle_err;
angle_dot = gyro_m-q_bias; %最优角速度
y = anglek;
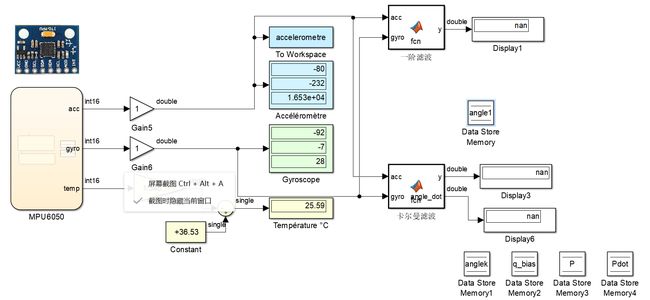
我认为程序原理应该是没问题的,因为网上找到的程序都大同小异,可是运行结果始终是nan,想不明白。
2018-11-28 13:38 上传
![]()
![]()
simulink框图