【友情分享】如何在Gazebo中实现多机器人仿真?
gazebo是一款功能强大的三维物理仿真平台,具备强大的物理引擎、高质量的图形渲染、方便的编程与图形接口,最重要的是其开源免费的特性。gazebo中的机器人模型与rviz使用的模型相同,但是需要在模型中加入机器人和周围环境的物理属性,例如质量、摩擦系数、弹性系数等。机器人的传感器信息也可以通过插件的形式加入仿真环境,以可视化的方式进行显示。
在ros学习及研发过程中,经常需要使用gazebo来进行3D仿真,对模型的各种物理参数、控制代码等进行实物前的操练。在多智能体协同控制的研究中,需要在gazebo中添加多个机器人用于仿真,那么,应该如何将一个乃至多个机器人,放入gazebo仿真环境中呢?
单机器人仿真
在gazebo中放入机器人的操作通常用launch文件实现,步骤可归纳为:
设置launch文件参数-运行gazebo仿真环境-加载机器人模型描述参数-加载机器人模型
其中有关于urdf模型的构建可以参考古月学院的课程《一起从零手写URDF模型》(点击阅读原文查看此课程)和前面小伙伴的文章《一文读懂URDF物理参数解释及生成》。
在我的仿真任务中代码如下:

多机器人仿真
相比于单机器人,多机器人仿真需要在原基础上加入
在前面的基础上,在launch文件中改写成以下内容:
命名空间根据工程定义,在我的仿真中为ares1、ares2、ares3;“-x 0”为机器人在gazebo中的初始位置。
将原本有关机器人状态的节点以及机器人模型放在

(在命名空间为ares2下的节点、话题等)
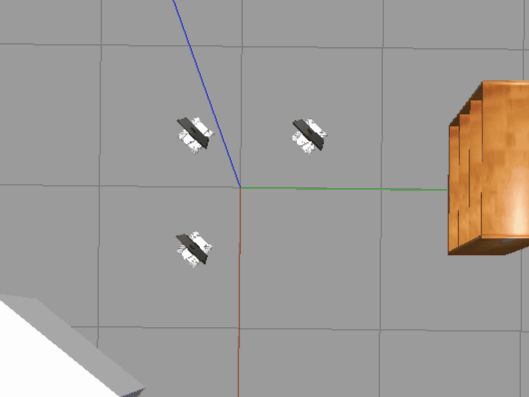
这样便可以加入独立的多个机器人模型,效果如下:

(多机器人仿真效果)
当
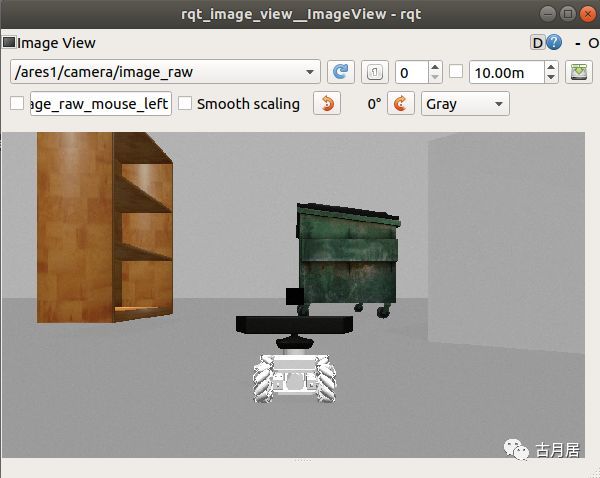


(ares1、ares2、ares3视角图像)
多机器人运动控制
在加入多个机器人后,想再做一下键盘对其的简单控制。
1)同时控制多个机器人
这里我使用的方法,是在机器人配置文件控制驱动插件代码中设置全局名称/cmd_vel:
/cmd_vel
/odom
odom wheel_lf_joint
wheel_rf_joint
wheel_lb_joint
wheel_rb_joint
20.0
base_link
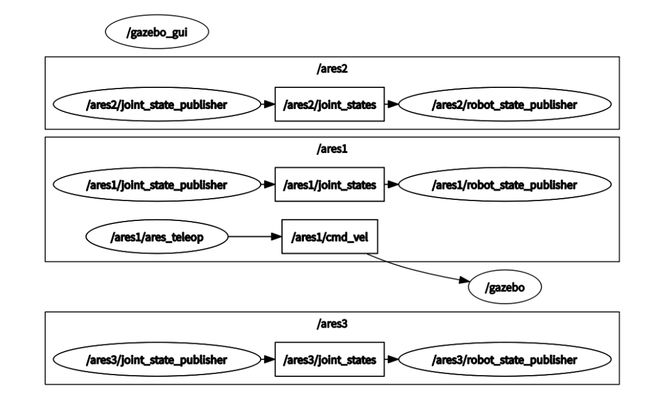
然后在键盘控制节点中发布全局名称/cmd_vel,这样就可以简单地做到多机器人同时接收一致的控制指令:
vel_pub = rospy.Publisher('/cmd_vel', Twist, queue_size=1)

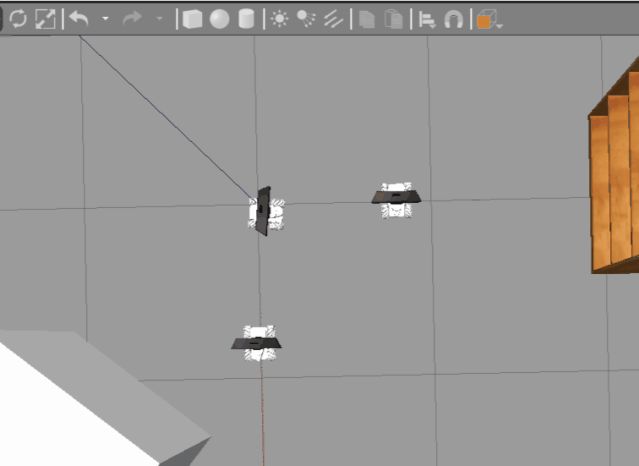
(整体控制时的rqt_graph)
(整体控制时的效果)
2)单独控制一个机器人
与前面相对,在这里我们将发布和接收的cmd_vel全部设置为相对名称(相对名称的典型特征是它缺少全局名称带有的前斜杠“/”),在我们设置的命名空间内发布后,ROS将当前命名空间的名称加在相对名称的前面,从而将相对名解析为全局名称。
即做以下修改:
cmd_vel
vel_pub = rospy.Publisher('cmd_vel', Twist, queue_size=1)
在终端启动键盘控制节点时加上命名空间,即可实现对单个机器人的控制:
$ ROS_NAMESPACE=ares1 rosrun ares_teleop ares_teleop.py
(单独控制时的rqt_graph)

(单独控制时的效果)
在命名空间下,还有经常使用的重映射
在gazebo中加载多机器人仅仅是多智能体协同控制研究的第一步,之后还有大量的研究要做,我写的也只是个人总结 ,一定有很多不足之处,欢迎大家一起留言讨论,引用古月君的话作为总结,“怕什么真理无穷,进一寸有一寸的欢喜”,共勉!
完整代码

你可以添加微信17775982065为好友,注明:公司+姓名,拉进 RT-Thread 官方微信交流群!

RT-Thread
让物联网终端的开发变得简单、快速,芯片的价值得到最大化发挥。Apache2.0协议,可免费在商业产品中使用,不需要公布源码,无潜在商业风险。
长按二维码,关注我们
 点击下方“阅读全文”查看课程《一起从零手写URDF模型》
点击下方“阅读全文”查看课程《一起从零手写URDF模型》