自动驾驶与心理疲劳
关注“心仪脑”查看更多脑科学知识
关键词:脑科学、交通驾驶
背景
心理疲劳是导致交通事故的危险因素之一,约占交通事故的20%。心理疲劳可分为主动疲劳和被动疲劳。任务要求持续的知觉活动协调参与从而造成的疲劳称为主动疲劳,而任务要求很少的知觉活动、长时间的单调反应所造成的疲劳称为被动疲劳。研究者提出,区分两种疲劳的关键取决于心理负荷。由负荷不足所诱发的疲劳为被动疲劳,而负荷过载所导致的疲劳为主动疲劳。研究通过创建不同复杂程度的驾驶情景来对这些问题进行分类,复杂的驾驶情景对心理负荷有累积性影响。
随着汽车自动化程度的逐步提高,脱离驾驶任务的驾驶员更容易处于较低的心理负荷状态。De Winter等人总结了32个驾驶员心理负荷的实证研究。他们发现,与手动驾驶相比,自动驾驶条件下驾驶员的心理负荷减少了20.8%。因此,我们通过创建不同复杂程度的驾驶情景和驾驶模式,量化了心理负荷与被动疲劳之间的共变关系。驾驶员的心理负荷不足可能导致被动疲劳状态。Körber等人基于眼动指数(eye movement index)发现,从低负荷状态发展为疲劳需要一定时间好一点。
有很多方法可以测量驾驶疲劳。手动驾驶时,研究者使用主观报告和车速可变性等方法。自动驾驶时,被动疲劳驾驶员对接管请求的响应速度变慢。这些指标能够敏感地反映实际工作中的疲劳情况。即使对驾驶员的状态进行准确实时的监测,也不足以测量疲劳程度。
脑电指标因其精确性与实时性得到研究者的青睐。Lal等人使用清醒状态被试的平均脑电图活动作为疲劳基准,他们分析了被试在不同疲劳阶段脑电图的变化结果,得出驾驶员处于疲劳状态时,δ波和θ波的活跃程度增加。在模拟驾驶场景中,Jagannath和Balasubramanian发现,随着被试疲劳程度的增加,α波的功率值显著增加,而θ波的功率值显著下降。要准确定义驾驶员的被动疲劳状态,还需要更明确的界定标准。因此,我们的研究目的是分析不同状态下脑电信号的时域特征,并选取α波的功率值作为被动指标。采用受试者工作特征曲线((receiver operating characteristic curve, ROC)分析方法确定驾驶员被动疲劳判别阈值。由此,我们提出以下假设:
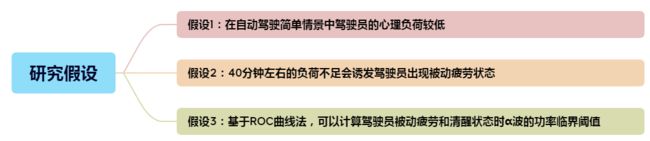
图1 全文研究假设
02
研究方法
2.1
实验设计
采用2(驾驶模式:自动驾驶、手动驾驶)×2(驾驶情景:简单情景、复杂情景)×6(反应时段:1-6)的三因素混合设计。被试间变量为驾驶模式和驾驶情景,被试内变量为驾驶的六个阶段。
表1 驾驶的六个阶段
| 第1阶段 |
最初的0-10分钟获得的数据 |
| 第2阶段 |
10-20分钟获得的数据 |
| 第3阶段 |
20-30分钟获得的数据 |
| 第4阶段 |
30-40分钟获得的数据 |
| 第5阶段 |
40-50分钟获得的数据 |
| 第6阶段 |
50-60分钟获得的数据 |
2.2
被试
面向社会招募48名没有自动驾驶车辆使用经验的驾驶员,年龄20-35岁(M =24.83,SD =2.81),驾龄1 -10年(M =2.94,SD = 2.06)。其中,有24名男性和24名女性。所有被试均随机分组。驾驶员身体健康,听力及裸眼视力正常。
2.3
研究工具
2.3.1
驾驶模拟器
检测反应任务(DRT)由宣爱QJ-3A1(小)型驾驶模拟器呈现,模拟器视屏角度120°,该模拟器由互动型视景系统、模拟座舱、电控系统、定制软件和附属设备及外饰件组成,具有视频教学、引导驾驶模拟练习、互动场景体验驾驶、事故倾向测评等功能,如图2所示。

图2 宣爱 QJ-3A1(小)型驾驶模拟器自动驾驶场景
模拟器可设计左右两侧随机出现的图片刺激为检测反应任务,出现时间间隔 为60±40s,自动记录从图片刺激出现到驾驶员踩下刹车的反应时间。实验结束 后,将反应时超过2s的试次记为错误,以评估驾驶员的正确率。
驾驶模式和驾驶情景由驾驶模拟器生成。在自动驾驶模式下,驾驶员不需要 操作方向盘和油门踏板,仅需对出现对检测反应任务采取刹车反应。而手动驾驶 模式时,驾驶员除了需要对检测反应任务采取刹车反应外,还需要操控车辆按既 定路线行驶。复杂的驾驶情景包含城市、乡镇、隧道、高速的复杂多弯道路,可 供驾驶员行驶1小时,而简单的驾驶情景是一条笔直、单调的高速路,两边没有任何建筑物。
2.3.2
脑电数据记录
EEG数据通过ANT脑电记录系统和国际10-20系统扩展的64导电极帽记录。所有电极点头皮电阻均小于10 kΩ,采样频率为1 kHz,如图3所示。

图3 脑电图数据采集场景
2.3.3
NASA任务负荷指数量表
美国航空航天局任务负荷指数量表(NASA-Task Load Index),该量表共6个维度,包括认知负荷、体力需求、努力程度、时间需求、受挫程度和业绩水平,每个维度由低到高共分为10个等级,“1”代表该状态程度极低,“10”代表该状态程度极高。
2.3.3
NASA任务负荷指数量表
由Elizabeth Ahsber等人(1997)年研究编制,共有25道题目,分为缺乏精力、体力消耗、身体不适、缺乏动力和瞌睡五个维度,每个维度下有5道题目,每个题目从0到10划分11个等级,0代表该状态程度极低,10代表该状态程度极高。
2.4
实验程序
实验持续1小时。被试进入实验室后,被要求洗头,戴脑电图帽和眼动仪。在实验开始之前,被试被要求熟悉驾驶模拟器并练习三个随机DRT(大约5分钟)任务。此外,他们还被要求填写NASA-TLX和SOFI量表作为预先测试。实验正式开始后,要求被试每10分钟填一次NASA-TLX表格。为了填表格,驾驶员靠边停车,我们停止记录脑电图和DRT数据。实验结束后,要求被试参加NASA-TLX和SOFI的后测。
2.5
脑电数据预处理
根据静息脑电数据预处理的原理,对连续脑电数据进行0.5~30 Hz的滤波处理后,将模拟驾驶过程中每个被试的脑电数据分为6个部分,分别对应1-6阶段。脑电图数据参考两个乳突的平均值(M1, M2)。采用独立分量分析(ICA)算法对被眼动、肌电(EMG)活动污染或其他非生理疾病污染的部分数据进行校正。
03
结果
3.1
主观报告
3.1.1
NASA任务负荷指数量表
以驾驶模式和驾驶情景为被试间变量,以测量阶段为被试内变量,以心理负荷维度得分为因变量,进行重复测量方差分析,结果表明,驾驶情景的主效应显著(F(1, 44) = 4.890, p = 0.046, ηp² = 0.088),复杂情景组驾驶员比简单情景组感受到更高的心理负荷。
以驾驶模式与驾驶情景为被试间变量,以测量阶段为被试内变量,以受挫程度维度得分为因变量,进行重复测量方差分析,结果表明,阶段的主效应显著(F(1, 44) =7.537, p = 0.009, ηp² = 0.146),随着阶段的增加,驾驶员所感受到的受挫程度也在增加。
3.1.2
疲劳量表
以驾驶模式与驾驶情景为被试间变量,以测量阶段为被试内变量,以缺乏精力、体力消耗、身体不适、缺乏动力和瞌睡维度分别为因变量,进行重复测量方差分析。测量阶段在五个维度中的主效应均显著(表2),随着测量阶段的增加,驾驶员的疲劳程度也随之增加。
表2 疲劳量表五个维度前后测差异分析
| 量表维度 | 前测 | 后测 | F |
p |
| 缺乏精力 |
1.386±1.887 |
3.390±2.486 |
21.909 |
0.000 |
| 体力耗尽 |
1.251±1.401 |
1.907±1.532 |
6.034 |
0.017 |
| 身体不适 |
1.209±1.359 |
1.879±1.461 |
7.969 |
0.006 |
| 缺乏动力 |
1.688±1.800 |
3.237±2.368 |
39.000 |
0.000 |
| 瞌睡 |
1.688±2.00 |
3.967±2.78 |
27.586 |
0.00 |
3.2
行为结果
3.2.1
DRT反应时
以驾驶模式和驾驶情景为被试间变量,以测量阶段为被试内变量,以DRT反应时为因变量,进行重复测量方差分析。结果表明,驾驶模式和阶段的交互作用显著(F(2, 88)=3.851, p=0.025, ηp2=0.080)。
简单效应检验表明,阶段 1、阶段2和阶段5,驾驶模式在DRT反应时上的差异不显著;阶段3、阶段4和阶段6,驾驶模式在DRT反应时上的差异显著(F(1, 44) = 4.003, p = 0.052, ηp2= 0.083; F(1, 44) =4. 856, p = 0.033, ηp2= 0.099; F(1, 44) = 7.456, p = 0.009, ηp2= 0.145)。在第4和第6阶段中,驾驶员在自动驾驶过程中的反应时间多于手动驾驶,见图4。
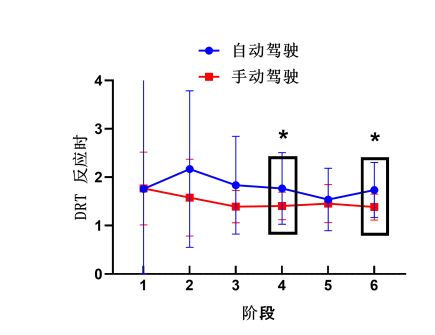
图4 驾驶模式对六个阶段中DRT反应时的影响
3.2.2
DRT正确率
以驾驶模式和驾驶情景为被试间变量,以测量阶段被试内变量,以DRT正确率为因变量,进行重复测量方差分析,结果表明,驾驶模式和阶段的交互作用显著(F(2, 88)=3.851, p=0.025, ηp2=0.080)。
简单效应检验表明,阶段2、阶段3和阶段5,驾驶模式在DRT正确率上的差异不显著;阶段 1、阶段4和阶段6,驾驶模式在DRT正确率上的差异显著(F(1, 44)=4.805, p=0.049, ηp2=0.082; F(1, 44)=4.468, p=0.040, ηp2=0.089; F(1, 44)=6.491, p=0.014, ηp2=0.124)。阶段4和阶段6,自动驾驶组驾驶员DRT正确率低于手动驾驶组,见图5。
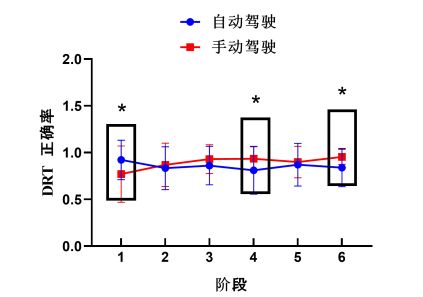
图5 驾驶模式对六个阶段中DRT正确率的影响
3.3
脑电数据结果
3.3.1
脑地形图的绘制
将各组被试的单受试者脑电图平均,得到组级脑电图。画取4个水平、6个阶段的α波脑地形图如下(图6)。
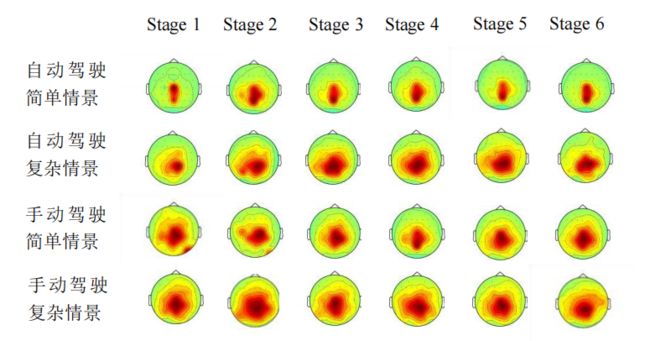
图6 驾驶员α波脑地形图
3.3.2
α波功率值
以驾驶模式和驾驶情景为被试间变量,以测量阶段为被试内变量,以α波的功率值为因变量,进行重复测量方差分析。结果表明,驾驶模式、驾驶情景和测量阶段之间存在显著的交互作用(F(1, 37)=4.651, p=0.038, ηp2=0.112)。
简单效应检验表明,复杂情景下,6个阶段中驾驶模式的差异均不显著。而 在简单情景下,阶段1、阶段2、阶段3和阶段5,驾驶模式在α波的功率值上差异不显著;阶段4和阶段6,驾驶模式在α波的功率值上差异显著(F(1,37)=4.651, p=0.038, ηp2=0.02; F(1,37)=4.651, p=0.038, ηp2=0.015)。如图7所示,在简单情景下的阶段4和阶段6,自动驾驶组α波的功率值显著高于手动驾驶组。
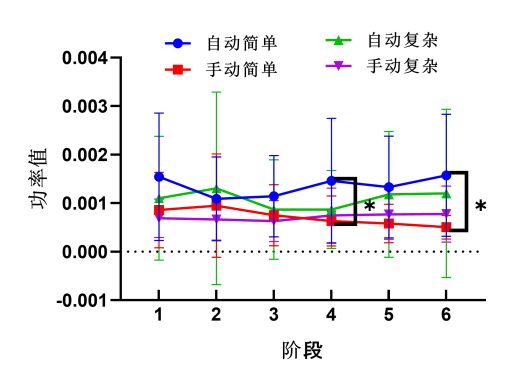
图7 驾驶模式、驾驶情景与阶段对α波的交互作用
3.3.3
根据ROC曲线判断临界值
将简单情景下手动驾驶阶段4和阶段6的数据作为清醒组,将简单情景下自动驾驶阶段4和阶段6的数据作为被动疲劳组。清醒和被动疲劳状态下脑电图信号α功率值的散点图如图8所示。使用GraphPad Prism 8软件对两组数据进行ROC计算,结果显示清醒状态和被动疲劳状态的脑电信号的α功率值之间存在显著差异(p=0.021),表明α功率值反映了驾驶员的疲劳状态,可以作为被动疲劳的一个鉴别指标。
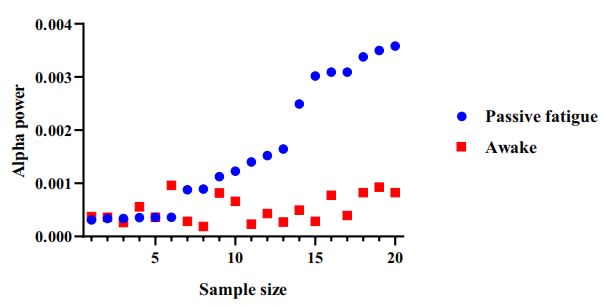
图8 被动疲劳前后散点图
为确定被动疲劳的判断阈值,根据ROC曲线分析方法绘制基于α功率值的ROC曲线,如图9所示。根据阈值选择原则,选取y左上指数最大的特征点作为判别阈值。计算每个甄别阈值对应的y指数,选取指数最大的特征点(图9中的点)作为最佳临界点,对应脑电图信号。α功率值为0.000852,敏感性为90%,特异性为70%,ROC曲线下面积为0.78,表明该方法具有较高的准确性。
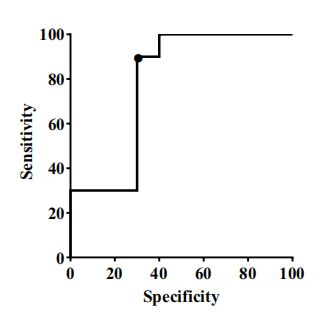
图9 EEG功率的ROC曲线
04
讨论
我们旨在考察驾驶员在自动驾驶条件下的被动疲劳。行为结果证实,驾驶员DRT表现在40分钟后开始下降,结果与脑电数据吻合较好。目前大多数关于被动疲劳的研究仅依赖于驾驶情境需求的单向维度来定义低负荷状态。我们证实了自动驾驶条件下驾驶场景对驾驶员心理负荷的影响,在自动驾驶模式下,简单情景会降低心理负荷。我们发现,只有当被试的心理负荷较低且疲劳累积时,被动疲劳诱导才会成功。
在主观报告中,驾驶员在简单情景下的心理负荷低于参与状态。在简单情景下,驾驶员更容易感到疲劳,这表明本研究中驾驶员的疲劳属于被动疲劳状态。由于主观报告仅在实验前后填写,无法确定被动疲劳的精确时间。通过对数据的进一步分析,我们发现在40分钟左右时自动驾驶简单情景的脑电图指标和检测反应任务的表现与手动驾驶有明显不同。因此,我们认为驾驶员在自动驾驶简单情景下发生被动疲劳的时间点应该在40分钟左右。
有必要对驾驶员被动疲劳的生理特征进行量化。在明确了被动疲劳的发生时间后,我们分析了简单情景条件下的自动驾驶和手动驾驶过程中驾驶员的α功率值。使用ROC曲线方法,基于α功率值的被动疲劳鉴别阈值为0.000852。阈值的确定进一步明确了被动疲劳的发生时间和生理特征,完善了被动疲劳理论。
05
结论
根据对48名驾驶员的综合测量,我们探讨了驾驶模式和驾驶情景对驾驶员心理负荷的影响。我们提出了被动疲劳诱导的有效性标准,并通过定义被动疲劳的时间和临界阈值改进了驾驶员被动疲劳理论。得出以下结论:(1)自动驾驶简单情景时,驾驶员的心理负荷较低;(2)驾驶员处于低负荷状态约40分钟时,会出现被动疲劳;(3)当驾驶员脑电图的α功率值大于0.000852时,驾驶员处于被动疲劳状态。

原文作者:马锦飞老师等
翻译:零卡果冻
封面:青囊
编辑:蔡瑞
全文完结,整理不易,看不完记得收藏,最后希望点赞支持一下!
了解更多,请关注“心仪脑”公众号!