多目标追踪——拓展卡尔曼滤波(EKF)
Reference:
示例1:https://github.com/smartleizi/KalmanFilter-Demo/blob/master/Kalman.m
示例2:https://blog.csdn.net/weixin_46136963/article/details/110142993
示例3:https://www.mathworks.com/help/fusion/ug/extended-kalman-filters.html
不讲原理,只给实例。EKF状态转换关系如下:

示例1:匀速直线运动,观测值为位置X
clc;clear;
T = 1:1:100; %时间
trueX=(1:2:200); %真实值
figure;%绘图
plot(T,trueX,"r",DisplayName="True Trajectory");
noise=1*randn(1,100); %均值为0,方差为1,生成100个误差项
Z=trueX+noise; %模拟的实际观测值
X=[110;110]; %随机设置的初始状态 X=[位置;速度]
P=[100 0;0 100]; %状态协方差矩阵,如果初始状态不可信,那么协方差矩阵越大越好
F=[1 1;0 1]; %状态转移矩阵
Q=[0.0001,0;0 , 0.0001]; %状态转移协方差矩阵
H=[1,0];%传感器提供的观测矩阵
R=1;%传感器的观测噪声协方差矩阵
%% 卡尔曼滤波
X_est = zeros(1,100);
for i = 1:100 %迭代次数
X_ = F*X;%基于上一状态预测当前状态 X_为t时刻状态预测(这里没有控制)
P_ = F*P*F'+Q;%更新协方差 Q系统过程的协方差
%% 计算卡尔曼增益
K = P_*H'/(H*P_*H'+R); %这里省了计算S的过程,S=inv(H*P_*H'+R);
%% 更新
X = X_+K*(Z(i)-H*X_);% 得到当前状态的最优化估算值 增益乘以残差
P = (eye(2)-K*H)*P_;%更新K状态的协方差
X_est(i) = X(1);%保存
end
hold on;
plot(T,X_est,"g",DisplayName="Estimate Trajectory");
legend(Location="northwest");
%计算误差
figure;
plot(T, trueX-X_est,"g",DisplayName="true-est");
legend(Location="northeast");
结果: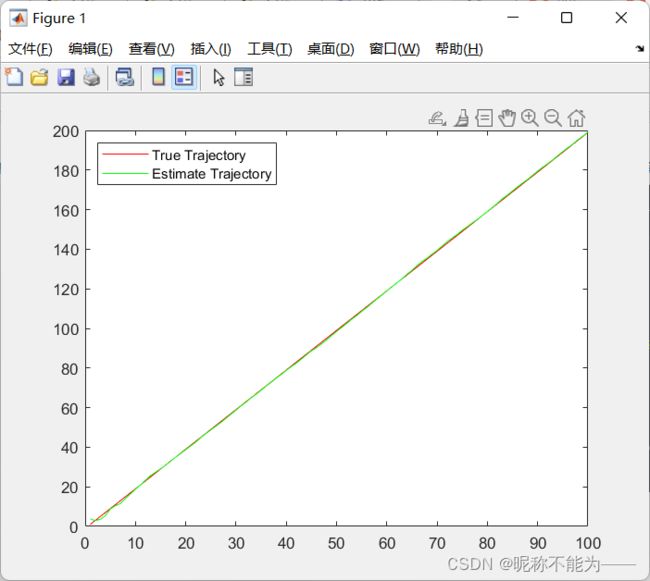

示例1变体:匀速直线运动,观测值为位置X和速度Vx
clc;clear;
T = 1:1:100; %时间
trueX=zeros(2,100); %真实值
trueX(:,1) = [1;2];
processNoise = diag([0.01,0.01]); %真实过程噪声,该值未知,此处用模拟替代
Z=zeros(2,100); %观测值
measureNoise=diag([100,100]); %真实量测噪声,该值未知,此处用模拟替代
%%生成真实值与量测值
F=[1 1;
0 1]; %真实的状态转移矩阵,该值未知
for i = 2:length(Z)
if i ~= 1
trueX(:,i) = F*trueX(:,i-1) + sqrt(processNoise)*randn(2,1);
end
Z(:,i) = trueX(:,i)+ sqrt(measureNoise)*randn(2,1);
end
%%画图
figure;
plot(T,trueX(1,:),"r",DisplayName="True Trajectory");
xlabel("t (s)");
ylabel("x (m)");
title("Trajectory");
X=[50;1]; %初始状态 X=[位置;速度],随机设置,可思考该参数有何影响?
P=[100 0;
0 100]; %状态协方差矩阵,随机设置,可思考该参数有何影响?
F=[1 1;
0 1]; %状态转移矩阵,根据运动学模型设置,可思考该参数有何影响?
Q=processNoise; %状态转移协方差矩阵,该值通过手动设定,设定的值与真实过程噪声越接近,效果越好,简单起见设置为真实过程噪声的值,有兴趣的同学可以更改这个参数试试
H=diag([1,1]); %传感器提供的观测矩阵
R=measureNoise; %传感器的观测噪声协方差矩阵,该值通过手动设定,设定的值与真实过程噪声越接近,效果越好,简单起见设置为真实过程噪声的值,有兴趣的同学可以更改这个参数试试
%% 卡尔曼滤波
X_est = zeros(1,100);
for i = 1:100 %迭代次数
X_ = F*X; %基于上一状态预测当前状态 X_为t时刻状态预测(这里没有控制)
P_ = F*P*F'+Q; %更新协方差 Q系统过程的协方差
%% 计算卡尔曼增益
K = P_*H'/(H*P_*H'+R);
%% 更新
X = X_+K*(Z(:,i)-H*X_); %得到当前状态的最优化估算值 增益乘以残差
P = (eye(2)-K*H)*P_; %更新K状态的协方差
X_est(i) = X(1);
end
hold on;
plot(T,X_est,"g",DisplayName="Estimate Trajectory");
legend(Location="northwest");
%计算误差
figure;
plot(T, trueX(1,:)-X_est,"g",DisplayName="real-est");
legend(Location="northeast");
结果:


示例2:非线性运动,大家可以参考链接。
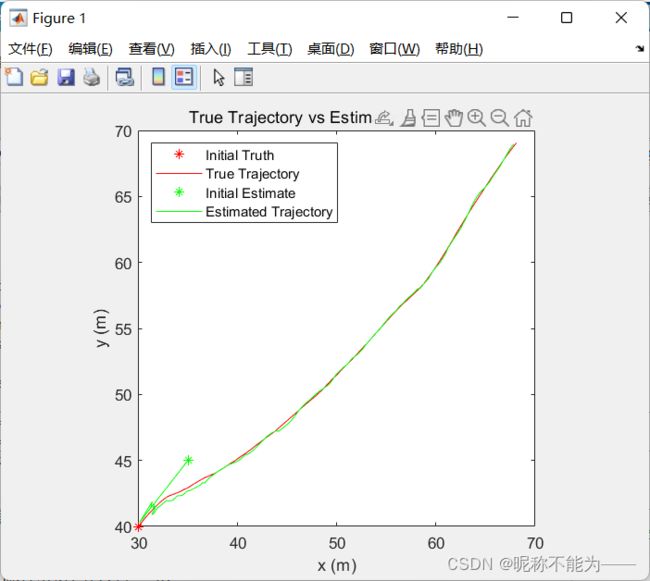
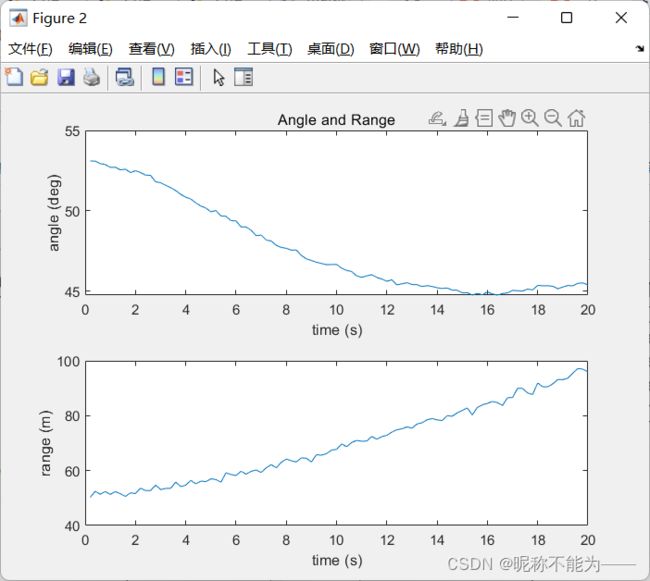
示例3:matlab官方EKF例子,二维平面下物体匀速直线运动,观测值为角度angle和距离range
clc;clear;
tic;
rng(2022); % For repeatable results
dt = 0.2; % seconds
simTime = 20; % seconds
tspan = 0:dt:simTime;
trueInitialState = [30; 1; 40; 1]; % [x;vx;y;vy]
initialCovariance = diag([100,1e3,100,1e3]);
processNoise = diag([0; .01; 0; .01]); % Process noise matrix
measureNoise = diag([2e-6;1]); % Measurement noise matrix. Units are m^2 and rad^2.
numSteps = length(tspan);
trueStates = NaN(4,numSteps);
trueStates(:,1) = trueInitialState;
estimateStates = NaN(size(trueStates));
measurements = NaN(2,numSteps);
for i = 2:length(tspan)
if i ~= 1
trueStates(:,i) = stateModel(trueStates(:,i-1),dt) + sqrt(processNoise)*randn(4,1);
end
measurements(:,i) = measureModel(trueStates(:,i)) + sqrt(measureNoise)*randn(2,1);
end
figure(1)
plot(trueStates(1,1),trueStates(3,1),"r*",DisplayName="Initial Truth")
hold on
plot(trueStates(1,:),trueStates(3,:),"r",DisplayName="True Trajectory")
xlabel("x (m)")
ylabel("y (m)")
title("True Trajectory")
axis square
figure(2)
subplot(2,1,1)
plot(tspan,measurements(1,:)*180/pi)
xlabel("time (s)")
ylabel("angle (deg)")
title("Angle and Range")
subplot(2,1,2)
plot(tspan,measurements(2,:))
xlabel("time (s)")
ylabel("range (m)")
filter = trackingEKF(State=[35; 0; 45; 0],StateCovariance=initialCovariance, ...
StateTransitionFcn=@stateModel,ProcessNoise=processNoise, ...
MeasurementFcn=@measureModel,MeasurementNoise=measureNoise);
estimateStates(:,1) = filter.State;
for i=2:length(tspan)
predict(filter,dt);
estimateStates(:,i) = correct(filter,measurements(:,i));
end
figure(1)
plot(estimateStates(1,1),estimateStates(3,1),"g*",DisplayName="Initial Estimate")
plot(estimateStates(1,:),estimateStates(3,:),"g",DisplayName="Estimated Trajectory")
legend(Location="northwest")
title("True Trajectory vs Estimated Trajectory")
toc;
disp(["运行时间:", num2str(toc)]);
function stateNext = stateModel(state,dt)
F = [1 dt 0 0;
0 1 0 0;
0 0 1 dt;
0 0 0 1];
stateNext = F*state;
end
function z = measureModel(state)
angle = atan(state(3)/state(1));
range = norm([state(1) state(3)]);
z = [angle;range];
end
结果:

在这个官方示例中,调用了集成好的 trackingEKF对象,这样虽然调用起来比较方便,但不利于原理的理解,现在考虑如何自己重写一下该示例。因为该运动为匀速直线运动,求一下状态转移矩阵的一阶雅可比矩阵,结果为F。现在只需要求观测矩阵的一阶雅可比矩阵即可。首先,有如下公式
angle = arctan(Y/X);
range = sqrt(XX+YY);
所以,观测矩阵的一阶雅可比矩阵为:
H = [∂angle/∂X, ∂angle/∂Vx, ∂angle/∂yY ∂angle/∂Vy; = [∂angle/∂X, 0, ∂angle/∂Y, 0;
∂range/∂X, ∂range/∂Vx, ∂range/∂Y, ∂range/∂Vy]; ∂range/∂x, 0, ∂range/∂y, 0];
对应的传感器观测噪声协方差矩阵:
R = [2e-6, 0;
0, 1];
求出这两项以后,按照示例1的逻辑来写就行了。代码如下:
clc;clear;
tic;
rng(2022); % For repeatable results
dt = 0.2; % seconds
simTime = 20; % seconds
tspan = 0:dt:simTime;
trueInitialState = [30; 1; 40; 1]; % [x;vx;y;vy]
initialCovariance = diag([100,1e3,100,1e3]);
processNoise = diag([0; 1e-2; 0; 1e-2]); % Process noise matrix
measureNoise = diag([2e-6;1]); % Measurement noise matrix. Units are m^2 and rad^2.
numSteps = length(tspan);
trueStates = NaN(4,numSteps);
trueStates(:,1) = trueInitialState;
estimateStates = NaN(size(trueStates));
measurements = NaN(2,numSteps);
for i = 2:length(tspan)
if i ~= 1
trueStates(:,i) = stateModel(trueStates(:,i-1),dt) + sqrt(processNoise)*randn(4,1);
end
measurements(:,i) = measureModel(trueStates(:,i)) + sqrt(measureNoise)*randn(2,1);
end
figure(1)
plot(trueStates(1,1),trueStates(3,1),"r*",DisplayName="Initial Truth")
hold on
plot(trueStates(1,:),trueStates(3,:),"r",DisplayName="True Trajectory")
xlabel("x (m)")
ylabel("y (m)")
title("True Trajectory")
axis square
%%filter
X = [35; 0; 45; 0];
P = initialCovariance;
F = [1 dt 0 0;
0 1 0 0;
0 0 1 dt;
0 0 0 1];
Q = processNoise;
syms x y vx vy;
jacobianH = jacobian([atan((y)/(x));norm([x y])], [x, vx, y, vy]);
R = measureNoise;
estimateStates(:,1) = X;
for i=2:length(tspan)
X_ = F*X;%基于上一状态预测当前状态 X_为t时刻状态预测(这里没有控制)
P_ = F*P*F'+Q;%更新协方差 Q系统过程的协方差
%% 计算卡尔曼增益
H = double(subs(jacobianH,{x,vx,y,vy},{X_(1),X_(2),X_(3),X_(4)}));
K = P_*H'/(H*P_*H'+R);
%% 更新
X = X_+K*(measurements(:,i)-measureModel(X_));% 得到当前状态的最优化估算值 增益乘以残差
P = (eye(4)-K*H)*P_;%更新K状态的协方差
estimateStates(:,i) = X;
end
figure(1)
plot(estimateStates(1,1),estimateStates(3,1),"g*",DisplayName="Initial Estimate")
plot(estimateStates(1,:),estimateStates(3,:),"g",DisplayName="Estimated Trajectory")
legend(Location="northwest")
title("True Trajectory vs Estimated Trajectory")
toc;
disp(["运行时间:", num2str(toc)]);
function stateNext = stateModel(state,dt)
F = [1 dt 0 0;
0 1 0 0;
0 0 1 dt;
0 0 0 1];
stateNext = F*state;
end
function z = measureModel(state)
angle = atan(state(3)/state(1));
range = norm([state(1) state(3)]);
z = [angle;range];
end
结果: