python opencv双目相机标定_python+opencv相机标定
一、制作标定板
将下图打印:

图一
将打印出的纸固定放到一个平板上,使用同一相机从不同的位置,不同的角度,拍摄标定板的多张照片(10-20张最佳),将照片放到文件夹中:
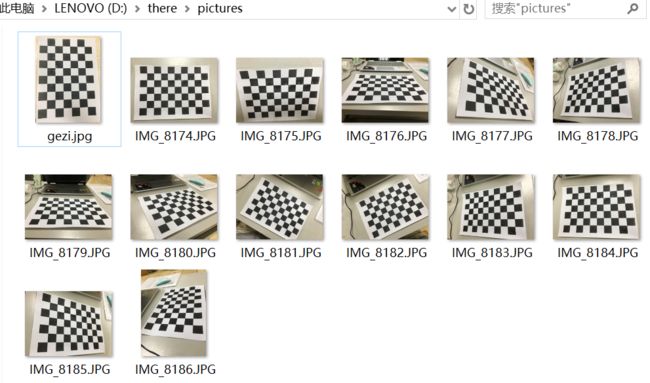
二、提取标定板的世界坐标
需要注意标定板的大小是标定板在水平和竖直方向上内角点的个数。内角点指的是,标定板上不挨着边界的角点(如图一标定板大小为6×9)。
三、张正友标定相机
(一)张正友标定相机原理
1.求得相机内参数:
用于标定的棋盘格是特制的,其角点坐标已知。标定棋盘格是三维场景中的一个平面∏,棋盘格在成像平面为π(知道了∏与π的对应点坐标之后,可求解两个平面1对应的单应矩阵H)。
根据相机成像模型,P为标定的棋盘坐标,p为其像素点坐标。则
![]() ,通过对应的点坐标求解H后,可用于求K,R,T。
,通过对应的点坐标求解H后,可用于求K,R,T。
2.设棋盘格所在平面为世界坐标系上XOY平面,则棋盘格上任一角点P世界坐标系为(X,Y,0)。

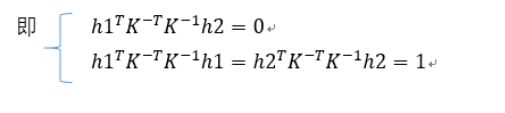
3、内参约束条件



四、实验结果
(一)角点检测



(二)相机参数:

其中:
ret: 48.043364303359844
内参数矩阵mtx:
[[2.89394836e+03 0.00000000e+00 1.18203203e+02]
[0.00000000e+00 7.97606845e+03 4.35321306e+02]
[0.00000000e+00 0.00000000e+00 1.00000000e+00]]
畸变系数dist:
[[-1.65763847e+02 8.93185546e+03 -2.72751174e+00 2.50930783e+00 9.38314320e+04]]
14张图的旋转向量rvecs分别是:
[array([[ 2.07541837],[-0.50479028],[-2.49085509]]),
array([[-1.16763908],[-1.12637317],[-1.07159956]]),
array([[ 1.19233488],[ 1.20624967],[-1.08566803]]),
array([[-1.16244554],[-1.13982256],[-1.06232949]]),
array([[-1.09733234],[-1.17285271],[-1.01093628]]),
array([[ 1.23539076],[ 1.16691521],[-1.11707143]]),
array([[-1.16607369],[-1.14036633],[-1.06258838]]),
array([[-1.23689999],[-1.08911596],[-1.1949959 ]]),
array([[-1.0598044 ],[-1.18432565],[-0.92552792]]),
array([[-1.28920578],[-1.03930212],[-1.2359854 ]]),
array([[ 1.21956501],[ 1.17686431],[-1.10965745]]),
array([[ 1.19665548],[ 1.20211216],[-1.08712586]]),
array([[-1.14009498],[-1.1404223 ],[-1.0457488 ]]),
array([[-1.72584463],[-0.30218636],[-2.16269854]])]
14张图的平移向量tvecs分别是:
[array([[ 2.58103626],[ -1.449794 ],[153.26014997]]),
array([[-1.39291898],[-1.93347226],[58.34618242]]),
array([[-1.18779854],[-1.88277967],[62.72913595]]),
array([[-1.1216013 ],[-2.25848093],[62.93996114]]),
array([[ 0.10165107],[-2.50680014],[74.40682257]]),
array([[-1.28469761],[-2.49801729],[81.14504656]]),
array([[-1.10391052],[-2.04871883],[63.69652216]]),
array([[ 0.27557857],[-2.51892743],[88.71794513]]),
array([[-0.92126877],[-3.07010974],[82.83508132]]),
array([[ 0.28318588],[-2.15120651],[88.45919501]]),
array([[-1.03690781],[-2.36490656],[81.60288684]]),
array([[-1.13388547],[-2.10610231],[66.81208467]]),
array([[-0.46224606],[-2.18458233],[68.05082571]]),
array([[ 4.31072343],[ -5.89752854],[300.37214262]])]
(三)手机型号
iPhone6s
五、代码


1 importcv22 importnumpy as np3 importglob4
5 #设置寻找亚像素角点的参数,采用的停止准则是最大循环次数30和最大误差容限0.001
6 criteria = (cv2.TERM_CRITERIA_MAX_ITER | cv2.TERM_CRITERIA_EPS, 30, 0.001)7
8 #获取标定板角点的位置
9 objp = np.zeros((6 * 9, 3), np.float32)10 objp[:, :2] = np.mgrid[0:9, 0:6].T.reshape(-1, 2) #将世界坐标系建在标定板上,所有点的Z坐标全部为0,所以只需要赋值x和y
11
12 obj_points = [] #存储3D点
13 img_points = [] #存储2D点
14
15 images = glob.glob("D:/there/pictures/*.jpg")16 for fname inimages:17 img =cv2.imread(fname)18 cv2.imshow('img',img)19 gray =cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)20
21 size = gray.shape[::-1]22 ret, corners = cv2.findChessboardCorners(gray, (6, 9), None)23 print(ret)24
25 ifret:26
27 obj_points.append(objp)28
29 corners2 = cv2.cornerSubPix(gray, corners, (5, 5), (-1, -1), criteria) #在原角点的基础上寻找亚像素角点
30 #print(corners2)
31 if[corners2]:32 img_points.append(corners2)33 else:34 img_points.append(corners)35
36 cv2.drawChessboardCorners(img, (8, 6), corners, ret) #记住,OpenCV的绘制函数一般无返回值
37 cv2.imshow('img', img)38 cv2.waitKey(2000)39
40 print(len(img_points))41 cv2.destroyAllWindows()42
43 #标定
44 ret, mtx, dist, rvecs, tvecs =cv2.calibrateCamera(obj_points, img_points, size, None, None)45
46 print("ret:", ret)47 print("mtx:\n", mtx) #内参数矩阵
48 print("dist:\n", dist) #畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3)
49 print("rvecs:\n", rvecs) #旋转向量 # 外参数
50 print("tvecs:\n", tvecs ) #平移向量 # 外参数
51
52 print("-----------------------------------------------------")
View Code
六、参考文献