【深度学习】:《100天一起学习PyTorch》第七天之模型评估和选择(上):欠拟合和过拟合(含源码)
【深度学习】:《100天一起学习PyTorch》模型评估和选择(上):欠拟合和过拟合
- ✨本文收录于【深度学习】:《100天一起学习PyTorch》专栏,此专栏主要记录如何使用
PyTorch实现深度学习笔记,尽量坚持每周持续更新,欢迎大家订阅! - 个人主页:JoJo的数据分析历险记
- 个人介绍:小编大四统计在读,目前保研到统计学top3高校继续攻读统计研究生
- 如果文章对你有帮助,欢迎✌
关注、点赞、✌收藏、订阅专栏
参考资料:本专栏主要以沐神《动手学深度学习》为学习资料,记录自己的学习笔记,能力有限,如有错误,欢迎大家指正。同时沐神上传了的教学视频和教材,大家可以前往学习。
- 视频:动手学深度学习
- 教材:动手学深度学习

文章目录
- 【深度学习】:《100天一起学习PyTorch》模型评估和选择(上):欠拟合和过拟合
- 1.基本概念
-
- 1.1训练误差和泛化误差
- 1.2训练集、验证集和测试集
- 1.3 交叉验证
- 1.4模型复杂度
- 2. 多项式回归
-
- 2.1 三次多项式回归(正常拟合)
- 2.2 一元线性回归(underfitting)
- 2.3 10次多项式(过拟合)
- 3.总结
1.基本概念
机器学习的任务是发现一种泛化的模式,通过训练集发现总体的规律,从而在未知的数据集上也能展现较好的精度。但是如何判断我们的模型不是单纯的记住了数据,而是真的发现了一种规律呢?因为,我们往往只能从有限样本集训练模型,当收集更多的数据时,会发现这些数据的预测结果和之前的关系完全不同。下面我们介绍一些机器学习评估模型的一些基本概念。
1.1训练误差和泛化误差
- 训练误差:模型在训练集上的误差
- 泛化误差:模型误差的期望
在现实情况,我们永远不能准确计算出泛化误差,因此, 在实际中,我们只能通过将模型应用于一个独立的测试集来估计泛化误差。
1.2训练集、验证集和测试集
- 训练集:用于训练模型,得到模型参数
- 验证集:用于选择模型,调整超参数
- 测试集:用于评估模型
| 用一个很形象的比喻就是:训练集相当于平时的练习,验证集相当于平时的小测验,测试集相当于期末考试。首先要保证平时练习的练习正确率较高,才能在期末考试中拿到较好的成绩。但是如果作弊看了练习题的答案,那么这个时候平时的练习会有较高的正确率,但是期末考试没有答案抄就拿不到好成绩了,这时就需要平时的小测验来验证一下你的学习成果,来避免你是因为偷看了练习答案从而有有了较高的正确率。 |
在训练数据时,我不希望用到测试集的数据,因为这样的话测试集得到的评估结果是很容易过拟合的。因此我们需要将数据集分为训练集、验证集和测试集,但是在实际应用是,验证集和测试集往往区分的不是很清楚。因此,很多时候,在实际中只设置了训练集和验证集。因此,我们在后续主要关注验证集的误差。
1.3 交叉验证
我们讨论了训练误差和验证误差。我们常常用交叉验证的方法来计算验证误差:
- 留一法交叉验证
留一法交叉验证,每次将一个样本作为验证集,剩下的n-1个样本作为训练集: ( x 2 , y 2 ) , . . . , ( x n , y n ) {(x_2,y_2),...,(x_n,y_n)} (x2,y2),...,(xn,yn)。拟合模型。如下图所示:
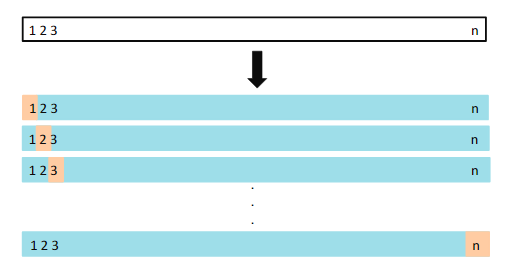
我们相当于做了n次模型训练,然后将这n次拟合的平均验证误差来估计某一个具体模型的验证误差。第一次训练得到的验证误差为: M S E 1 = ( y 1 − y ^ 1 ) 2 MSE_1=(y_1-\hat{y}_1)^2 MSE1=(y1−y^1)2。重复n次得到: M S E 2 , . . . , M S E n MSE_2,...,MSE_n MSE2,...,MSEn。最后我们取平均值得到LOOCV估计的测试MSE:
C V ( n ) = 1 n ∑ i = 1 n M S E i . CV_{(n)}=\frac{1}{n}\sum_{i=1}^{n}MSE_i. CV(n)=n1i=1∑nMSEi.
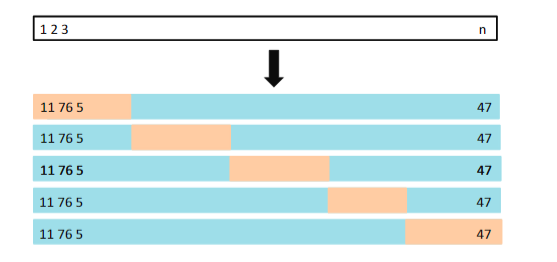
- K折交叉验证
K折交叉验证的思路是将数据集随机平均的分为K组。第一组作为验证集,剩下的k-1组作为训练集。当k=n时,留一法交叉验证可以看做是K折交叉验证。和留一法交叉验证类似, M S E 1 MSE_1 MSE1可以看做是第一次训练时,验证组的平均误差。重复k次,我们可以得到k-折交叉验证的验证误差:
C V ( k ) = 1 k ∑ i = 1 k M S E i . CV_{(k)}=\frac{1}{k}\sum_{i=1}^{k}MSE_i. CV(k)=k1i=1∑kMSEi.
下图给出了5折交叉验证的示意图:
1.4模型复杂度
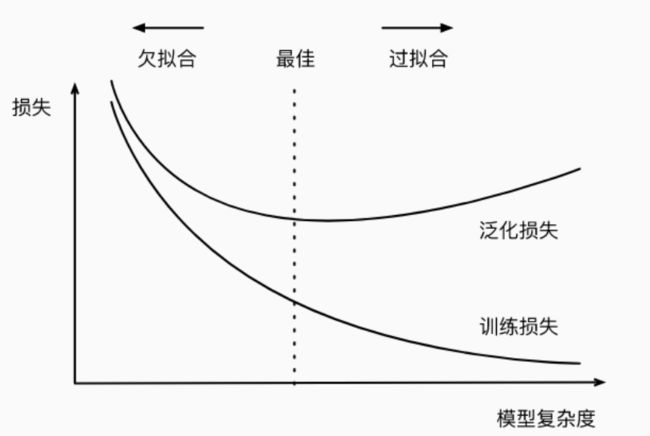
在得到训练的模型后,计算其训练误差,验证误差。往往会出现两种情况,一种是过拟合,一种是欠拟合
欠拟合(underfitting):欠拟合是指模型在训练集上表现的也不好,模型不能很好的拟合训练集过拟合(overfitting):模型在训练集上表现很好,但是在测试集上表现的较差正则化(regularization):正则化可以用于处理过拟合问题
当模型出现欠拟合时候,我们可以考虑使用更复杂的模型来进行训练,当模型过拟合时,需要减少模型的复杂度。具体关系如下图所示:
一般来说,当数据集很多时,使用较复杂的模型;当数据集较少时,使用交简单的模型。
下面我们以多项式回归为例来具体看看这些指标情况
2. 多项式回归
经过上述一些概念的介绍,下面通过一个多项式的具体例子来看一下,首先多项式回归定义如下:
y = β 0 + β 1 X + β 2 X 2 + β 3 X 3 + . . . + β n X n y = \beta_0 + \beta_1X+\beta_2X^2+\beta_3X^3+...+\beta_nX^n y=β0+β1X+β2X2+β3X3+...+βnXn
==当 β 2 , . . . , β n \beta_2,...,\beta_n β2,...,βn都为0时,就是一个简单的一元线性回归,因此高次多项式是可以包含低次多项式回归的。==说明高次多项式模型更复杂。下面我们以一个三次多项式的数据为例,分别拟合不同的多项式回归模型,观察其训练误差和验证误差的情况
import math
import numpy as np
import torch
from torch import nn
from torch.utils import data
from IPython import display
生成一个模拟数据集,其真实的关系是三次多项式回归
max_degree = 20 # 多项式的最大阶数
n_train, n_test = 100, 100 # 训练和测试数据集大小
true_w = np.zeros(max_degree) # 设置w
true_w[0:4] = np.array([5.1, 1.2, -3.1, 5.1])
features = np.random.normal(size=(n_train + n_test, 1))
np.random.shuffle(features)
poly_features = np.power(features, np.arange(max_degree).reshape(1, -1))
for i in range(max_degree):
poly_features[:, i] /= math.gamma(i + 1)
# labels的维度:(n_train+n_test,)
labels = np.dot(poly_features, true_w)
labels += np.random.normal(scale=0.1, size=labels.shape)
下面将多维数组转换为张量(tensor)
true_w, features, poly_features, labels = [torch.tensor(x, dtype=
torch.float32) for x in [true_w, features, poly_features, labels]]
接下来需要先定义一些基本的函数,大家可以直接下载d2l库导入,在沐神的教材上都有,但是有的时候安装d2l报错,因此如果大家不想安装d2l的话,可以参考一下下面这些函数,大家也可以自己将这些函数写入自己的包中方便导入。
# 定义数据迭代器函数
def load_array(data_arrays, batch_size, is_train=True):
"""构造一个PyTorch数据迭代器"""
dataset = data.TensorDataset(*data_arrays)#将数据转换为tensor
return data.DataLoader(dataset, batch_size, shuffle=is_train)
# 定义一个类来接收变量
class Accumulator: #@save
"""在n个变量上累计"""
def __init__(self, n):
self.data = [0.0] * n
def add(self, *args):
self.data = [a + float(b) for a, b in zip(self.data, args)]
def reset(self):
self.data = [0.0] * len(self.data)
def __getitem__(self, idx):
return self.data[idx]
# 定义准确率函数
def accuracy(y_hat, y): #@save
"""计算预测正确的数量"""
if len(y_hat.shape) > 1 and y_hat.shape[1] > 1:
y_hat = y_hat.argmax(axis=1)
cmp = y_hat.type(y.dtype) == y
return float(cmp.type(y.dtype).sum())
# 计算误差函数
def evaluate_loss(net, data_iter, loss): #@save
"""评估给定数据集上模型的损失"""
metric = Accumulator(2) # 损失的总和,样本数量
for X, y in data_iter:
out = net(X)
y = y.reshape(out.shape)
l = loss(out, y)
metric.add(l.sum(), l.numel())
return metric[0] / metric[1]
# 训练函数
def train_epoch(net, train_iter,loss,updater):
"""三个变量,训练损失,训练准确度,样本数"""
net.train()
metric = Accumulator(3)
for X,y in train_iter:
y_hat = net(X)
l = loss(y_hat,y)
if isinstance(updater, torch.optim.Optimizer):#如果是pytorch内置优化器
updater.zero_grad()
l.mean().backward()
updater.step()
else:
"""自己定义的优化器"""
l.sum().backward()
updater(X.shape[0])
metric.add(float(l.sum()),accuracy(y_hat,y),y.numel())
return metric[0]/metric[2], metric[1]/metric[2]
# 定义坐标轴函数
def set_axes(axes, xlabel, ylabel, xlim, ylim, xscale, yscale, legend):
"""设置matplotlib的轴"""
axes.set_xlabel(xlabel)
axes.set_ylabel(ylabel)
axes.set_xscale(xscale)
axes.set_yscale(yscale)
axes.set_xlim(xlim)
axes.set_ylim(ylim)
if legend:
axes.legend(legend)
axes.grid()
# 定义保存函数
def use_svg_display(): #@save
"""使用svg格式在Jupyter中显示绘图"""
display.set_matplotlib_formats('svg')
# 定义一个动画绘制类
class Animator: #@save
"""在动画中绘制数据"""
def __init__(self, xlabel=None, ylabel=None, legend=None, xlim=None,
ylim=None, xscale='linear', yscale='linear',
fmts=('-', 'm--', 'g-.', 'r:'), nrows=1, ncols=1,
figsize=(3.5, 2.5)):
# 增量地绘制多条线
if legend is None:
legend = []
plt.show()
self.fig, self.axes = plt.subplots(nrows, ncols, figsize=figsize)
if nrows * ncols == 1:
self.axes = [self.axes, ]
# 使用lambda函数捕获参数
self.config_axes = lambda: set_axes(
self.axes[0], xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
self.X, self.Y, self.fmts = None, None, fmts
def add(self, x, y):
# 向图表中添加多个数据点
if not hasattr(y, "__len__"):
y = [y]
n = len(y)
if not hasattr(x, "__len__"):
x = [x] * n
if not self.X:
self.X = [[] for _ in range(n)]
if not self.Y:
self.Y = [[] for _ in range(n)]
for i, (a, b) in enumerate(zip(x, y)):
if a is not None and b is not None:
self.X[i].append(a)
self.Y[i].append(b)
self.axes[0].cla()
for x, y, fmt in zip(self.X, self.Y, self.fmts):
self.axes[0].plot(x, y, fmt)
self.config_axes()
display.display(self.fig)
display.clear_output(wait=True)
# 定义训练函数
def train(train_features, test_features, train_labels, test_labels,
num_epochs=400):
loss = nn.MSELoss(reduction='none')#设置损失函数为MSE
input_shape = train_features.shape[-1]
# 不设置偏差,因为我们已经在多项式中已经设置好了
net = nn.Sequential(nn.Linear(input_shape, 1, bias=False))#定义线性神经网络
batch_size = min(10, train_labels.shape[0])#确定batch
train_iter = load_array((train_features, train_labels.reshape(-1,1)),
batch_size)#训练集
test_iter = load_array((test_features, test_labels.reshape(-1,1))
,batch_size)#测试集
trainer = torch.optim.SGD(net.parameters(), lr=0.01)#训练集,使用SGD训练模型
animator = Animator(xlabel='epoch', ylabel='loss', yscale='log',
xlim=[1, num_epochs], ylim=[1e-3, 1e2],
legend=['train', 'test'])#图形相关设置
for epoch in range(num_epochs):
train_epoch(net, train_iter, loss, trainer)
if epoch == 0 or (epoch + 1) % 20 == 0:
animator.add(epoch + 1, (evaluate_loss(net, train_iter, loss),#计算训练误差并绘制
evaluate_loss(net, test_iter, loss)))#计算测试误差并绘制
print('weight:', net[0].weight.data.numpy())
2.1 三次多项式回归(正常拟合)
因为我们生成的数据集是3次多项式回归得到的,因此使用三次多项式回归拟合结果会很精确
train(poly_features[:n_train, :4], poly_features[n_train:, :4],
labels[:n_train], labels[n_train:])
weight: [[ 5.1068187 1.2157811 -3.1099443 5.064199 ]]
可以看出,随着训练次数的增加,训练误差和验证误差都不断下降到小于0.01,并且验证误差和验证误差基本一致
2.2 一元线性回归(underfitting)
下面我们使用一元线性回归来拟合数据,由于我们知道真实的数据集是三次关系的,此时使用一元线性回归无法进行精确拟合,会导致模型的bias较大,训练误差和验证误差都很大
# 从多项式特征中选择前2个维度,即1和x
train(poly_features[:n_train, :2], poly_features[n_train:, :2],
labels[:n_train], labels[n_train:])
weight: [[3.8188436 3.0646155]]
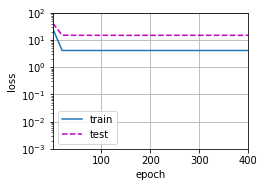
从上图可以看出,和我们预计得到的结果一致,由于模型太简单,连训练集上也不能很好的拟合,导致训练误差和验证误差都很大
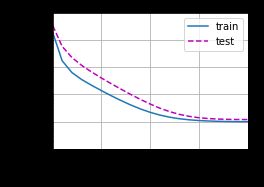
2.3 10次多项式(过拟合)
下面我们使用10次多项式来进行拟合,由于模型的复杂度太高,会导致模型出现过拟合,验证集上的误差会随着训练次数增加会先下降再上升
# 从多项式特征中选取所有维度
train(poly_features[:n_train, :11], poly_features[n_train:, :11],
labels[:n_train], labels[n_train:], num_epochs=500)
weight: [[ 5.0872297 1.2546227 -2.9732502 4.719495 -0.47507587 1.4278368
-0.05434499 0.30877623 0.28959352 0.18821514 0.06768304]]
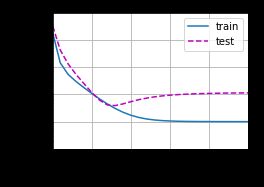
从上图可以看出,和我们预计的一致,验证误差先减小后增大,如果我们提前结束训练的话,能够得到还不错的结果,这种后续中会介绍
3.总结
| 过拟合是机器学习和深度学习中比较常见的问题,可以使用正则化的方法来处理,这在后续中会继续讨论 如果模型出现欠拟合现象的话,可以增加模型的复杂度。具体在下一章继续介绍一些常用的处理过拟合的方法。 |
本章的介绍到此介绍,如果文章对你有帮助,请多多点赞、收藏、评论、关注支持!!