Pytorch 模型选择,过拟合和欠拟合
模型选择,过拟合和欠拟合
0. 环境介绍
环境使用 Kaggle 里免费建立的 Notebook
教程使用李沐老师的 动手学深度学习 网站和 视频讲解
小技巧:当遇到函数看不懂的时候可以按 Shift+Tab 查看函数详解。
1. 选择模型
在机器学习中,我们通常在评估几个候选模型后选择最终的模型。 这个过程叫做模型选择。 有时,需要进行比较的模型在本质上是完全不同的(比如,决策树与线性模型)。 又有时,我们需要比较不同的超参数设置下的同一类模型。
例如,训练多层感知机模型时,我们可能希望比较具有 不同数量的隐藏层、不同数量的隐藏单元以及不同的的激活函数组合的模型。 为了确定候选模型中的最佳模型,我们通常会使用验证集。
1.1 训练误差和泛化误差
- 训练误差:模型在训练数据上的误差
- 泛化误差:模型在新数据集上的误差
- 例子:根据模拟考试成绩来预测未来考试成绩
- 在过去的考试中表现很好(训练误差)不代表未来考试一定会好(泛化误差)。
- 学生 A 通过背书在模拟考试中拿到很好成绩(过拟合)。
- 学生 B 知道答案后面的原因。
- 真实考试中学生 B 的成绩很大概率上要比 A 好。
1.2 验证数据集和测试数据集
- 验证数据集合:一个用来评估模型好坏的数据集
- 例如拿出 50% 的训练数据
- 不要跟训练数据混在一起(常犯错误)
- 测试数据集:只用一次的数据集,例如:
- 未来的考试
- 我出价的房子的实际成交价
- 用在 kaggle 私有排行榜中的数据集
1.3 K-折交叉验证
- 在没有足够多数据时使用(这是常态)
- 算法:
- 将训练数据分割成 K K K 块
- f o r for for i = 1 , . . . , K i = 1, ..., K i=1,...,K
- 使用第 i i i 块作为验证数据集,其余的作为训练数据集
- 报告 K K K 个验证集误差的平均
- 常用 K = 5 K = 5 K=5 或 10 10 10、
2. 过拟合和欠拟合

2.1 模型容量
- 拟合各种函数的能力
- 低容量的模型难以拟合训练数据

- 高容量的模型可以记住所有的训练数据
模型容量的影响:

2.2 估计模型容量
- 难以在不同种类算法之间比较
- 例如树模型和神经网络
- 给定一个模型种类,将有两个主要因素
- 参数的个数
- 参数值的选择范围
2.3 V C VC VC 维
- 统计学习理论的一个核心思想
- 对于一个分类模型, V C VC VC 等于一个最大数据集的大小,不管如何给定标号(label),都存在一个模型来对它进行完美分类。
线性分类器的 V C VC VC 维:
- 2 2 2 维输入的感知机, V C 维 = 3 VC 维 = 3 VC维=3
- 能够分类任何 3 3 3 个点,但不是 4 4 4 个。
- 支持 N N N 维输入的感知机的 V C VC VC 维是 N + 1 N+1 N+1
- 一些多层感知机的 VC 维 O ( N log 2 N ) O(N\log_{2}{N}) O(Nlog2N)
2.4 数据复杂度
- 多个重要因素
- 样本个数
- 每个样本的元素个数
- 时间、空间结构
- 多样性
3. 通过多项式拟合来交互探索上述概念
3.0 导入模块
# !pip install -U d2l
import math
import numpy as np
import torch
from torch import nn
from d2l import torch as d2l
3.1 生成数据集
给定 x x x,我们将使用以下三阶多项式来生成训练和测试数据的标签:
y = 5 + 1.2 x − 3.4 x 2 2 ! + 5.6 x 3 3 ! + ϵ where ϵ ∼ N ( 0 , 0. 1 2 ) . y = 5 + 1.2x - 3.4\frac{x^2}{2!} + 5.6 \frac{x^3}{3!} + \epsilon \text{ where } \epsilon \sim \mathcal{N}(0, 0.1^2). y=5+1.2x−3.42!x2+5.63!x3+ϵ where ϵ∼N(0,0.12).
在优化的过程中,我们通常希望避免非常大的梯度值或损失值。 这就是我们将特征 x i x^i xi 从调整为 x i i ! \frac{x^i}{i!} i!xi 的原因, 这样可以避免很大的带来的特别大的指数值。
max_degree = 20 # 多项式的最大阶数
n_train, n_test = 100, 100 # 训练和测试数据集大小
true_w = np.zeros(max_degree) # 分配大量的空间
true_w[0:4] = np.array([5, 1.2, -3.4, 5.6])
features = np.random.normal(size=(n_train + n_test, 1))
np.random.shuffle(features)
poly_features = np.power(features, np.arange(max_degree).reshape(1, -1))
for i in range(max_degree):
# 避免过大的梯度值或损失值
poly_features[:, i] /= math.gamma(i + 1) # gamma(n)=(n-1)!
# labels的维度:(n_train+n_test,)
labels = np.dot(poly_features, true_w)
# 噪音
labels += np.random.normal(scale=0.1, size=labels.shape)
将 numpy array 转换为 tensor:
true_w, features, poly_features, labels = [torch.tensor(x, dtype=
torch.float32) for x in [true_w, features, poly_features, labels]]
features[:2], poly_features[:2, :], labels[:2]

从生成的数据集中查看一下前 2 个样本, 第一个值是与偏置相对应的常量特征。
3.2 定义模型
3.2.1 定义计算损失
def evaluate_loss(net, data_iter, loss): #@save
"""评估给定数据集上模型的损失"""
metric = d2l.Accumulator(2) # 损失的总和,样本数量
for X, y in data_iter:
out = net(X)
y = y.reshape(out.shape)
l = loss(out, y)
metric.add(l.sum(), l.numel())
return metric[0] / metric[1]
最后输出结果是平均损失。
3.2.2 定义训练函数
def train(train_features, test_features, train_labels, test_labels,
num_epochs=400):
# 均方差损失函数
loss = nn.MSELoss(reduction='none')
# train_features.shape 为 (400,20)
input_shape = train_features.shape[-1]
# 不设置偏置,因为我们已经在多项式中实现了它
net = nn.Sequential(nn.Linear(input_shape, 1, bias=False))
batch_size = min(10, train_labels.shape[0])
train_iter = d2l.load_array((train_features, train_labels.reshape(-1,1)),
batch_size)
test_iter = d2l.load_array((test_features, test_labels.reshape(-1,1)),
batch_size, is_train=False)
trainer = torch.optim.SGD(net.parameters(), lr=0.01)
animator = d2l.Animator(xlabel='epoch', ylabel='loss', yscale='log',
xlim=[1, num_epochs], ylim=[1e-3, 1e2],
legend=['train', 'test'])
for epoch in range(num_epochs):
d2l.train_epoch_ch3(net, train_iter, loss, trainer)
if epoch == 0 or (epoch + 1) % 20 == 0:
animator.add(epoch + 1, (evaluate_loss(net, train_iter, loss),
evaluate_loss(net, test_iter, loss)))
print('weight:', net[0].weight.data.numpy())
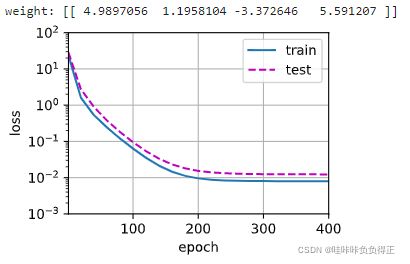
3.3 三阶多项式函数拟合(正常)
我们将首先使用三阶多项式函数,它与数据生成函数的阶数相同。 结果表明,该模型能有效降低训练损失和测试损失。 学习到的模型参数也接近真实值 w = [ 5 , 1.2 , − 3.4 , 5.6 ] w = [5, 1.2, -3.4, 5.6] w=[5,1.2,−3.4,5.6]。
# 从多项式特征中选择前4个维度,即1,x,x^2/2!,x^3/3!
train(poly_features[:n_train, :4], poly_features[n_train:, :4],
labels[:n_train], labels[n_train:])
3.3 线性函数拟合(欠拟合)
让我们再看看线性函数拟合,减少该模型的训练损失相对困难。 在最后一个迭代周期完成后,训练损失仍然很高。 当用来拟合非线性模式(如这里的三阶多项式函数)时,线性模型容易欠拟合。
# 从多项式特征中选择前2个维度,即1和x
train(poly_features[:n_train, :2], poly_features[n_train:, :2],
labels[:n_train], labels[n_train:])

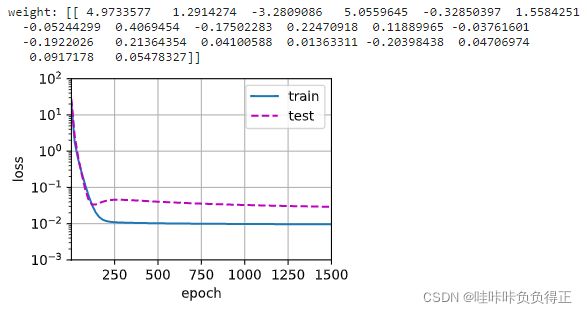
3.4 高阶多项式函数拟合(过拟合)
让我们尝试使用一个阶数过高的多项式来训练模型。 在这种情况下,没有足够的数据用于学到高阶系数应该具有接近于零的值。 因此,这个过于复杂的模型会轻易受到训练数据中噪声的影响。 虽然训练损失可以有效地降低,但测试损失仍然很高。 结果表明,复杂模型对数据造成了过拟合。
# 从多项式特征中选取所有维度
train(poly_features[:n_train, :], poly_features[n_train:, :],
labels[:n_train], labels[n_train:], num_epochs=1500)
4. 小结
- 欠拟合是指模型无法继续减少训练误差。过拟合是指训练误差远小于验证误差。
- 由于不能基于训练误差来估计泛化误差,因此简单地最小化训练误差并不一定意味着泛化误差的减小。机器学习模型需要注意防止过拟合,即防止泛化误差过大。
- 验证集可以用于模型选择,但不能过于随意地使用它。
- 我们应该选择一个复杂度适当的模型,避免使用数量不足的训练样本。