点在多边形内判断方法matlab实现(点在凸包内、任意形状内判定)
点在多边形内判断方法matlab实现(点在凸包内、任意形状内判定)
- 0 前言
- 1 射线交叉点法 (Crossing Number)
- 2 环绕数法(Winding Number)
- 3 角度法(转角法)
-
- 3.1 角度相加法
- 3.2 改进角度法(matlab自带inpolygon函数方法)
- 4 叉积法(只适用于凸多边形)
- 5 网格法
- 6 二分法(O(logn)算法)
- 7 多个区域之间
惯例声明:本人没有相关的工程应用经验,只是纯粹对相关算法感兴趣才写此博客。所以如果有错误,欢迎在评论区指正,不胜感激。本文主要关注于算法的实现,对于实际应用等问题本人没有任何经验,所以也不再涉及。
0 前言
本文大概说一下目前常用计算机判断点在多边形内的方法。这个实际应用还是比较普遍的,比如单纯的几何意义上的判断,或者选定一个范围,看看数据是否超出这个范围之类的。
咱们人在判断点是否在多边形内,通常是先识别多边形图形,然后看看点是否在这个识别的图形范围内。但是对于很复杂的图形,就不容易一下子得到结论,而且这种基于图形的算法实际上效率并不高,不适用于计算机计算。
常用的判断点是否在多边形内的算法,与多边形的变数n相关,通常都是O(n)量级的,所以其实大家都相差不大,就看谁更能优化。但是对于凸多边形来说,可以用二分法算法,将计算复杂度降到O(logn)量级,这个在后面会涉及到。
之后如果有空,准备试一试写个判断点是否在三维以及高维多面体中的文章(又挖坑不填 )。
本文参考的博客和论文如下:
[1] 凸多边形(计算几何,判断点是否在多边形内,二分法)
https://www.cnblogs.com/yym2013/p/3673616.html
[2] 判断点在多边形内的算法(Winding Number详解)
https://www.codenong.com/cs106265948/
[3]Hormann K, Agathos A. The point in polygon problem for arbitrary polygons[J]. Computational geometry, 2001, 20(3): 131-144.
1 射线交叉点法 (Crossing Number)
该方法称为射线法或者奇偶规则法。原理就是从该点P出发向外射出一条射线,如果射线与多边形的交点数量为奇数,则点P在多边形内。
可以想象一个肥皂泡,如果想从肥皂泡里冲出去,则一定要穿过一次肥皂泡。如果穿过了两次肥皂泡,则一进一出等于没有穿过。
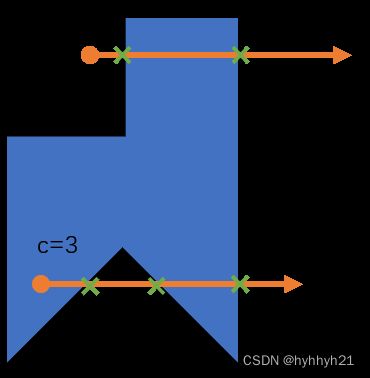
通常为了简单起见,射线直接选择为+x方向,也就是向右的方向。
一般优化的思路有:
1大概定义一个多边形的范围,如果点超过这个范围,则无需再判断,直接判断为不在图形内。
2与+x方向射线相交的线段,其y的范围一定要在射线两端。也就是说如果线段在射线的正上方,或者线段在射线的正下方,都不需要再计算交点,因为不可能相交。
3与+x方向射线相交的线段,不可能在射线的左侧。
这个方法看着很简单,但是还有一些细节需要扣。比如当边线正好也是水平线,怎么计算交点?当点落在边线上,怎么计算交点?当边线正好是水平线,而且点也落在了这个边线上,交叉点算几个?当点的射线正好穿过多边形顶点,会不会得到与两个边相交的bug?
关于这几个问题,我大概解决方法为:设置一个边线点的概念,专门用来判断点是否在边线上。如果点刚好落在水平线的边线上,则不再计算是否相交,直接当做点在边线上处理。交叉点的判断,用一头小于等于,一头小于的方式,避免重复计算。而且因为计算中存在误差,所以对于计算得到的交点xc,需要加一个误差带来防止判断失误。
具体不多说,matlab程序如下:
clear
clc
close all
%多边形定义(连线必须按照首尾相接的顺序)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%凹多边形
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%凹多边形,而且自相交
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%凸多边形
%要判断的点
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
[IsInPoly,IsOnBD]=IfInPoly1(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
%scatter(xy2(:,1),xy2(:,2),24,or(IsInPoly,IsOnBD),'Marker','.');%不显示边线
%后置函数
function [IsInPoly,IsOnBD]=IfInPoly1(BD,xy2)
%输出逻辑索引(IsInPoly表示在内部,IsOnBD表示在多边形边界上)
%BD是多边形边界,存在顺序,两列。xy2是点的坐标,两列。
%方法1,射线法
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
BD2=[BD;BD(1,:)];
else %给出的边界已经收尾相接
BD2=BD;
end
%删除边界中相邻重复的点
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1)-1;
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
IsOnBD=false(NP,1);%是否在边线上
%判断整个边线的大概范围
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%做+x方向的射线
for kp=1:NP
%如果这个点的xy超过整个边线的xy,则肯定不在边线内
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xpmax_X_BD || ypmax_Y_BD
%IsInPoly(kp)=false;
continue
end
%循环每一条边
NCross=0;%初始化交点数量
for kB=1:NB
xB1=BD2(kB,1);xB2=BD2(kB+1,1);
yB1=BD2(kB,2);yB2=BD2(kB+1,2);
%如果在+x方向上相交,在点一定在线的左边
if max([xB1,xB2])=xp)
IsOnBD(kp)=true;%如果点在水平线段上,则证明点在边缘
break %停止循环
end
%判断是否是某个顶点
if (xp==xB1 && yp==yB1) || (xp==xB2 && yp==yB2)
IsOnBD(kp)=true;%如果点是某个边缘顶点,则证明点在边缘
break
end
%如果射线穿过这个边,则y值一定介于这个边的两个y值中间
if (yB1<=yp && yp4*eps %由于计算会导致xc有一定的误差,所以保守估算为4*eps
NCross=NCross+1;%证明的确相交,交点+1
end
%再次判断是否在边线上
if abs(xc-xp)<=4*eps && abs(yc-yp)<=4*eps %这里因为也涉及到xc,所以也设置了一个误差带
IsOnBD(kp)=true;%如果交点xc就是点xp,则证明点在线上
break
end
end
end
%根据相交点数的奇偶性判断是否在多边形内
if ~IsOnBD(kp) && mod(NCross,2)
IsInPoly(kp)=true;%如果是奇数,则证明在多边形内
end
end
end
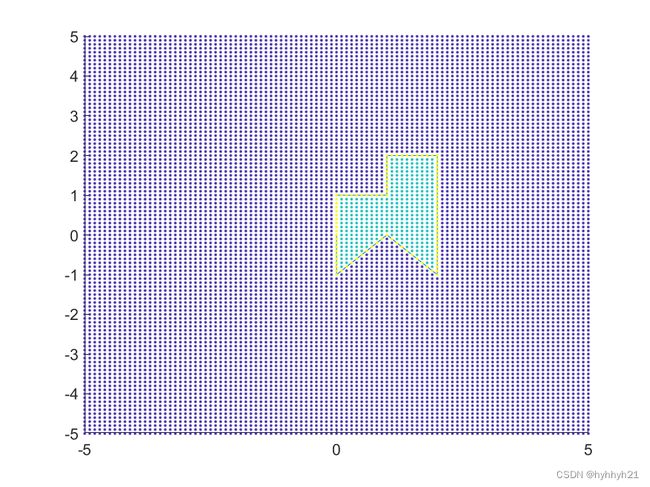
注:这里给出了点在边界内IsInPoly,点在多边形边界上IsOnBD两个结果。如果需要合并,可以用or(IsInPoly,IsOnBD)进行合并结果。
计算结果如下:
2 环绕数法(Winding Number)
环绕数法和相交数法类似,都是引出一条射线。但是环绕数不再计算具体交点,而是判断相交的线段,是向上穿过这个射线还是向下穿过这个射线。
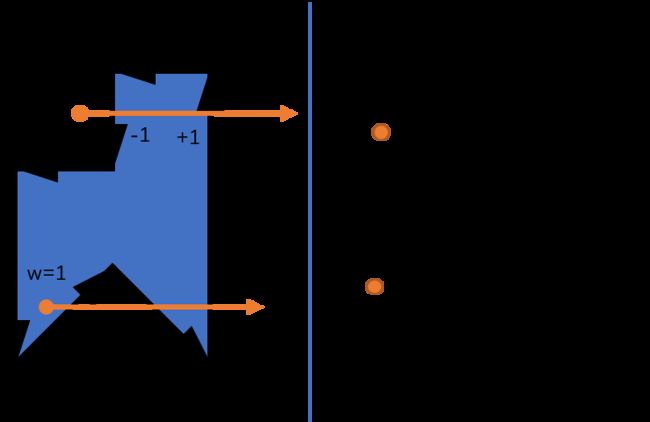
举个例子,还是用上一章节的图进行举例子。但是这里的线段都被赋予了方向。我们定义向上穿过射线(点在线段左侧),环绕数+1,向下穿过射线(点在线段右侧),环绕数-1。最终对环绕数相加,等于0说明点在多边形外,不等于0说明点在多边形内。
这个方法的matlab程序如下:
clear
clc
close all
%多边形定义(连线必须按照首尾相接的顺序)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%凹多边形
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%凹多边形,而且自相交
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%凸多边形
%要判断的点
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
[IsInPoly,IsOnBD]=IfInPoly2(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
%如果考虑边界情况,则把两个结果合并
%IsInPoly=or(IsInPoly,IsOnBD);
function [IsInPoly,IsOnBD]=IfInPoly2(BD,xy2)
%输出逻辑索引(IsInPoly表示在内部,IsOnBD表示在多边形边界上)
%BD是多边形边界,存在顺序,两列。xy2是点的坐标,两列。
%方法2 winding number 环绕数法
%将边界收尾相接
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
NB=size(BD,1);
BD2=[BD;BD(1,:)];
else %给出的边界已经收尾相接
NB=size(BD,1)-1;
BD2=BD;
end
%删除边界中相邻重复的点
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1)-1;
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
IsOnBD=false(NP,1);%是否在边线上
%判断整个边线的大概范围
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%做+x方向的射线,来判定环绕数
for kp=1:NP
%如果这个点的xy超过整个边线的xy,则肯定不在边线内
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xpmax_X_BD || ypmax_Y_BD
continue
end
%循环每一条边
NWinding=0;%初始化环绕数
for kB=1:NB
xB1=BD2(kB,1);xB2=BD2(kB+1,1);
yB1=BD2(kB,2);yB2=BD2(kB+1,2);
%如果在+x方向上相交,在点一定在线的左边
if max([xB1,xB2])=xp)
IsOnBD(kp)=true;%如果点在水平线段上,则证明点在边缘
break
end
%判断是否是某个顶点
if (xp==xB1 && yp==yB1) || (xp==xB2 && yp==yB2)
IsOnBD(kp)=true;%如果点是某个边缘顶点,则证明点在边缘
break
end
%如果射线穿过这个边,则y值一定介于这个边的两个y值中间
if (yB1<=yp && ypyB1 %这个边的方向向上
CrossP=(xB2-xB1)*(yp-yB1)-(xp-xB1)*(yB2-yB1);%计算向量差积,判定点在向量左右
if CrossP>0 %点在向量左侧
NWinding=NWinding+1;
end
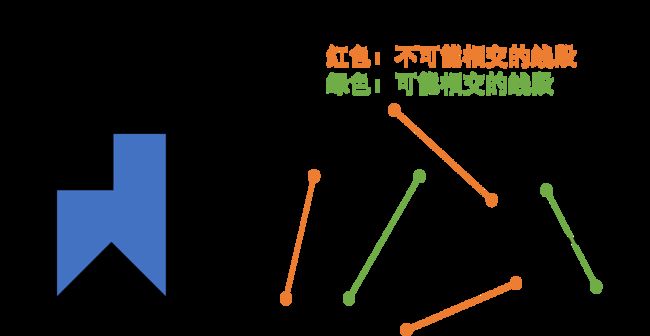
elseif yB2 这个方法的优势在于,对于自相交图形,环绕数法可以对重叠区域进行区分。比如规定环绕数等于2时,如果用射线法则会判断为点不在图形内,但是环绕数法可以将这个区域区分出来。
(如果规定环绕数为偶数,则点在图形外,环绕数为奇数点在图形内,则环绕数法和射线交点法等价。)
比如下图就展示了一个自相交图形,在同时用交叉点法和环绕数法时,两者对于重叠部分的处理方式。一般的图形不会出现自相交现象,但是如果对于自相交这一部分有比较高的需求的话,可以选择所需要的算法。
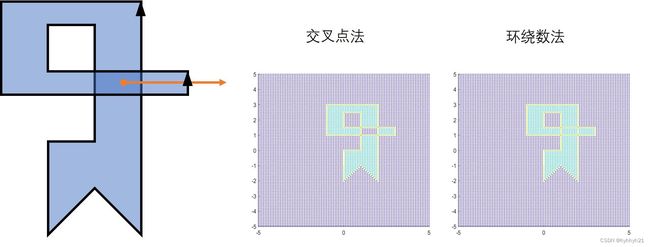
当然,环绕数法由于无需计算具体交点,还避免了使用除法。如果对除法也比较敏感的话,可以尝试用环绕数法。
3 角度法(转角法)
3.1 角度相加法
这个方法比较容易理解,就是如果点在图形内部,则所有射线加起来的角度等于360°。

但是如果图形是凹多边形,这个方法还需要定义角度的正负。如上图所示,在同一个方向上递增的角度定义为正,在这个方向上突然反向的角度定义为负。具体判定方法,用向量的叉积来判定。
写作公式为:
θ = ∑ ω i = ∑ 1 n − 1 a c o s ( v 1 ⃗ ⋅ v 2 ⃗ ∥ v 1 ⃗ ∥ ∥ v 2 ⃗ ∥ ) ∗ s i g n ( v 1 ⃗ × v 2 ⃗ ) \theta=\sum{\omega_i}=\sum_{1}^{n-1}{acos(\frac{\vec{v_1} \cdot \vec{v_2}}{\left \| \vec{v_1}\right \| \left \| \vec{v_2}\right \|} ) *sign(\vec{v_1}×\vec{v_2})} θ=∑ωi=1∑n−1acos(∥v1∥∥v2∥v1⋅v2)∗sign(v1×v2)
这里的v1和v2,是点p到线段两端的两条射线。
这里的基本原理以及结果和环绕数法相同,但是因为涉及到acos的计算,所以通常速度比较慢,后面小节的改进法会讲到怎么加速。
具体程序如下:
clear
clc
close all
%多边形定义(连线必须按照首尾相接的顺序)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%凹多边形
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%凹多边形,而且自相交
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%凸多边形
%要判断的点
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
%xy2=[0.5,2];
[IsInPoly,IsOnBD]=IfInPoly3(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
function [IsInPoly,IsOnBD]=IfInPoly3(BD,xy2)
%方法3 计算角度法
%将边界收尾相接
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
NB=size(BD,1);
BD2=[BD;BD(1,:)];
else %给出的边界已经收尾相接
NB=size(BD,1)-1;
BD2=BD;
end
%删除边界中相邻重复的点
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1)-1;
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
IsOnBD=false(NP,1);%是否在边线上
%判断整个边线的大概范围
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%做+x方向的射线,来判定环绕数
for kp=1:NP
%如果这个点的xy超过整个边线的xy,则肯定不在边线内
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xpmax_X_BD || ypmax_Y_BD
continue
end
%判断是否是某个顶点
if any(and(xp==BD2(:,1),yp==BD2(:,2)))
%IsOnBD(kp)=true;%如果点是某个边缘顶点,则证明点在边缘
IsOnBD(kp)=true;
continue
end
%循环每一条边
AngleSum=0;%初始化环绕数
for kB=1:NB
xB1=BD2(kB,1);xB2=BD2(kB+1,1);
yB1=BD2(kB,2);yB2=BD2(kB+1,2);
v1=[xB1-xp,yB1-yp];v2=[xB2-xp,yB2-yp];
CosAngle=dot(v1,v2)/norm(v1)/norm(v2);
if abs(CosAngle+1)<4*eps
IsOnBD(kp)=true;
break
end
Sign=sign(det([v1(1),v2(1);v1(2),v2(2)]));
AngleSum=acos(CosAngle)*Sign+AngleSum;
%AngleList(kB)=acos(CosAngle)*Sign/pi*180;
end
if abs(AngleSum)/2/pi>(1-1e-5)
IsInPoly(kp)=true;
end
end
IsInPoly=and(IsInPoly,~IsOnBD);%对于那些又在边线上又边线内的,判定为在边线上。
end
3.2 改进角度法(matlab自带inpolygon函数方法)
matlab自带inpolygon()函数来判定点是否在多边形内。
这里不再具体的计算角度,而是利用射线x和y的关系,进行大致判断。首先将点与边线上各个顶点相连,组成一组射线。将射线方向分为右上↗、左上↖、左下↙、右下↘这四个象限,分别赋予0、1、2、3这4个数字。然后根据这几个数字的变化,判断最终角度。
具体的方法可以参见matlab函数inpolygon的具体代码,或者看论文The point in polygon problem for arbitrary polygons,这里我就不再献丑重新自己编了。
具体使用方法如下
clear
clc
close all
%多边形定义(连线必须按照首尾相接的顺序)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%凹多边形
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%凹多边形,而且自相交
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%凸多边形
%要判断的点
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
%方法6 matlab自带方法
[IsInPoly,IsOnBD]=inpolygon(xy2(:,1),xy2(:,2),BD(:,1),BD(:,2));
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
我用的是2019b版本的,有几个边线点没有识别出来,估计是没有引入误差的结果。但是运行速度很快。
4 叉积法(只适用于凸多边形)
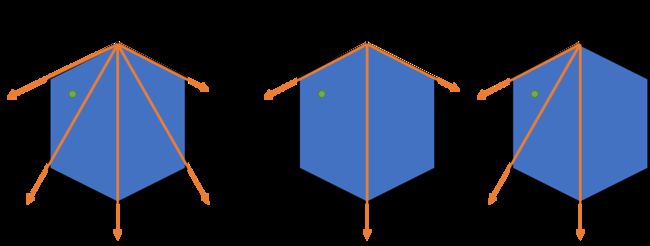
叉积法的思路来源于角度法。对于凸多边形来说,点在多边形内的话,将该点与多边形各个顶点相连组成一系列向量,这些向量的夹角一定是锐角。
比如上左图,P1和P2叉积是正的,P2和P3叉积也为正,同理P3和P4,P4和P5,P5和P1都为正。但是对于右图,P5和P1的叉积就是负值,说明点在多边形外。
代码如下:
clear
clc
close all
%多边形定义(连线必须按照首尾相接的顺序)
%BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%凹多边形
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%凹多边形,而且自相交
BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%凸多边形
%要判断的点
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
%xy2=[0.8,0.8];
IsInPoly=IfInPoly4(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
%scatter(xy2(:,1),xy2(:,2),24,IsInPoly+2*IsOnBD,'Marker','.')
scatter(xy2(:,1),xy2(:,2),24,IsInPoly,'Marker','.')
function IsInPoly=IfInPoly4(BD,xy2)
%方法4 计算叉积法
%将边界收尾相接
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
NB=size(BD,1);
BD2=[BD;BD(1,:)];
else %给出的边界已经收尾相接
NB=size(BD,1)-1;
BD2=BD;
end
%删除边界中相邻重复的点
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1)-1;
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
IsOnBD=false(NP,1);%是否在边线上
%判断整个边线的大概范围
min_X_BD=min(BD(:,1));
max_X_BD=max(BD(:,1));
min_Y_BD=min(BD(:,2));
max_Y_BD=max(BD(:,2));
%做+x方向的射线,来判定环绕数
for kp=1:NP
%如果这个点的xy超过整个边线的xy,则肯定不在边线内
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xpmax_X_BD || ypmax_Y_BD
continue
end
%判断是否是某个顶点
if any(and(xp==BD2(:,1),yp==BD2(:,2)))
%IsOnBD(kp)=true;%如果点是某个边缘顶点,则证明点在边缘
IsInPoly(kp)=true;
continue
end
%循环每一条边
ArrowDir=zeros(NB,1);%初始化叉积方向
for kB=1:NB
xB1=BD2(kB,1);xB2=BD2(kB+1,1);
yB1=BD2(kB,2);yB2=BD2(kB+1,2);
v1=[xB1-xp,yB1-yp,0];v2=[xB2-xp,yB2-yp,0];
CrossV=cross(v1,v2);
ArrowDir(kB)=CrossV(3);
end
%根据最大角度和最小角度之差
if all(ArrowDir>=0) || all(ArrowDir<=0)
IsInPoly(kp)=true;
end
end
end
结果如下图:
可以看到对于凸多边形,这个算法还是没问题的。但是对于凹多边形,这个方法就会产生错误的结果。所以用这个方法一定要注意是否为凸多边形。
5 网格法
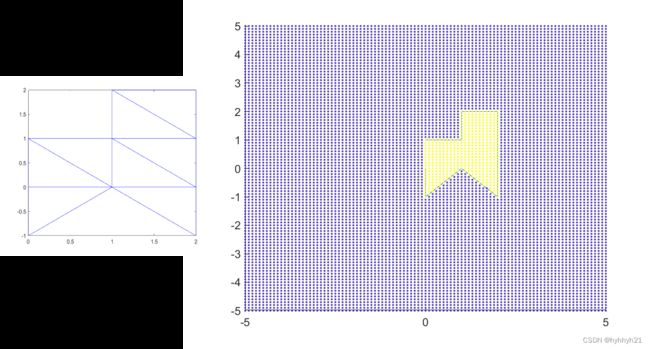
网格法顾名思义,就是由于多边形形状太过于复杂,无法简单的进行判断。那么就可以先给多边形内部画上许多个网格,然后依次判断点是否在网格内就可以。
矩形网格的优点在于判断速度快,但是对于斜边的判断比较复杂。有可能导致矩形的一部分在多边形内,一部分在多边形外。
这里用三角形网格进行简单的判断。首先就是划分三角形,这里我用的是matlab自带的delaunayTriangulation()函数。
判断点是否在三角形内,可以用两个向量解二元二次方程得到。
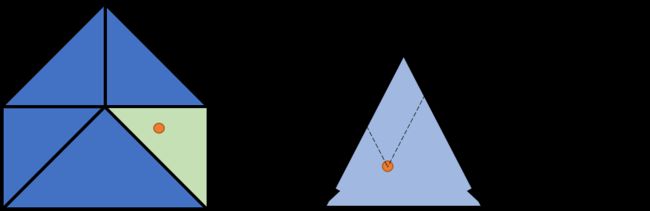
这个点的位置可以用au+bv来确定,如果满足a、b、a+b都在0到1之间,则该点肯定在三角形内。
具体程序如下:
clear
clc
close all
%多边形定义(连线必须按照首尾相接的顺序)
BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%凹多边形
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%凹多边形,而且自相交
%BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%凸多边形
%要判断的点
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
IsInPoly=IfInPoly5(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly,'Marker','.')
function IsInPoly=IfInPoly5(BD,xy2)
%方法5 三角形网格剖分法
%如果边界收尾相接,则取消
if (BD(1,1)==BD(end,1)) && (BD(1,2)==BD(end,2))
BD2=BD(1:end-1,:);
else %给出的边界已经收尾相接
BD2=BD;
end
%删除边界中相邻重复的点
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
NB=size(BD2,1);
NP=size(xy2,1);
IsInPoly=false(NP,1);%true(NP,1);%false(NP,1);
%IsOnBD=false(NP,1);%是否在边线上
%判断整个边线的大概范围
min_X_BD=min(BD2(:,1));
max_X_BD=max(BD2(:,1));
min_Y_BD=min(BD2(:,2));
max_Y_BD=max(BD2(:,2));
%按照边缘三角剖分
C=(1:NB)';
C=[C,[(2:NB)';1]];
DT = delaunayTriangulation(BD2,C);
%剔除落在外面的三角形
IO = isInterior(DT);
CL=DT.ConnectivityList;
CL(~IO,:)=[];
BD2=DT.Points;%点有可能会被网格划分所更新,所以这里重新加载一下
NB=size(BD2,1);
BDx=BD2(:,1);
BDy=BD2(:,2);
%triplot(CL,BDx,BDy)
%得到每个三角形的坐标
TRI_X=BDx(CL);
TRI_Y=BDy(CL);
NT=size(CL,1);
%计算每个三角形的范围
max_TRI_X=max(TRI_X,[],2);
min_TRI_X=min(TRI_X,[],2);
max_TRI_Y=max(TRI_Y,[],2);
min_TRI_Y=min(TRI_Y,[],2);
%计算每个三角形的向量
V1_Sum=[TRI_X(:,2)-TRI_X(:,1),TRI_Y(:,2)-TRI_Y(:,1)];
V2_Sum=[TRI_X(:,3)-TRI_X(:,1),TRI_Y(:,3)-TRI_Y(:,1)];
%开始循环判断
for kp=1:NP
%如果这个点的xy超过整个边线的xy,则肯定不在边线内
xy_k=xy2(kp,:);
xp=xy_k(1);
yp=xy_k(2);
if xpmax_X_BD || ypmax_Y_BD
continue
end
%判断是否是某个顶点
if any(and(xp==BD2(:,1),yp==BD2(:,2)))
%IsOnBD(kp)=true;%如果点是某个边缘顶点,则证明点在边缘
IsInPoly(kp)=true;
continue
end
%循环每一三角形
for kT=1:NT
if xpmax_TRI_X(kT) || ypmax_TRI_Y(kT)
continue %如果超出三角形范围,则直接跳过
end
%计算是否在三角形内
V1=V1_Sum(kT,:);
V2=V2_Sum(kT,:);
A=[V1',V2'];
B=[xp-TRI_X(kT,1);yp-TRI_Y(kT,1)];
u12=A\B;
if max(u12)<=1 && min(u12)>=0 && sum(u12)<=1
IsInPoly(kp)=true;
break
end
end
end
end
网格划分结果以及最终图案如下:
6 二分法(O(logn)算法)
如果多边形的边数非常多,则用之前的方法计算,复杂度都是O(n)级别的,要循环的边数和图形成正比。(虽然感觉如果图形比较简单,优化比较好的话,那么射线法和环绕数法中,很多边都循环不到,应该也不会太慢)。
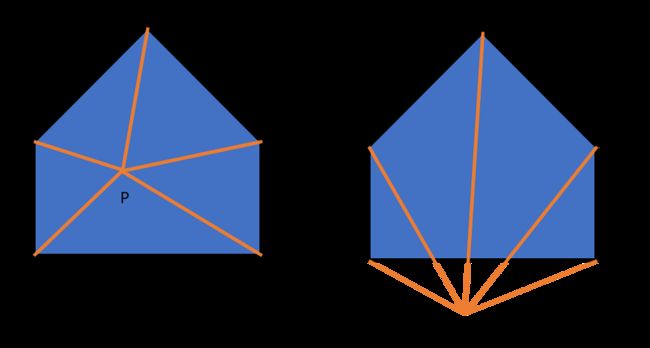
那么二分法的思路就是逐步缩小范围,找到点所在的区域。算法图示如下:
先任取一个顶点,然后对其它顶点做射线。如果点在多边形内,那么点一定在这个夹角范围之内。然后通过逐步缩小范围,确定点的最终位置。
之后,我们就可以用前面第5章判断点在三角形内的方法,判断这个点是否在这个三角形内。
具体程序如下:
clear
clc
close all
%多边形定义(连线必须按照首尾相接的顺序)
%BD=[0,0;0,-1;1,0;2,-1;2,0;2,1;2,2;1,2;1,1;0,1];%凹多边形
%BD=[0,-1;0,-2;1,-1;2,-2;2,-1;2,0;2,3;-1,3;-1,1;...
% 3,1;3,1.5;0,1.5;0,2.5;1,2.5;1,0;0,0];%凹多边形,而且自相交
BD=[0,1;-1,0;-1,-1;0,-1;1,-1;1,0];%凸多边形
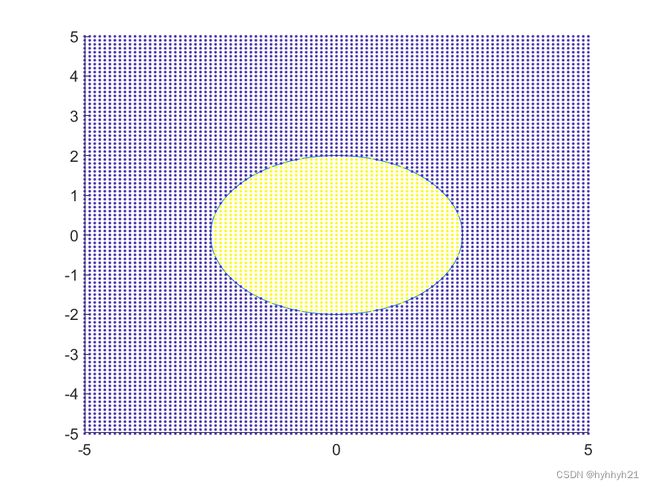
BD=[2.5*cos(0.01:0.01:2*pi)',2*sin(0.01:0.01:2*pi)'];
%要判断的点
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
xy2=[X(:),Y(:)];
IsInPoly=IfInPoly7(BD,xy2);
figure()
hold on
plot(BD(:,1),BD(:,2))
scatter(xy2(:,1),xy2(:,2),24,IsInPoly,'Marker','.')
function IsInPoly=IfInPoly7(BD,xy2)
%方法7 二分法
NP=size(xy2,1);
BD2=BD;
%1初始化输入
%删除边界中相邻重复的点
IsSame=and(BD2(1:end-1,1)==BD2(2:end,1),BD2(1:end-1,2)==BD2(2:end,2));
BD2([IsSame;false],:)=[];
BD=BD2;
%将边界收尾相接
if (BD(1,1)~=BD(end,1)) || (BD(1,2)~=BD(end,2))
BD2=[BD;BD(1,:)];
else %给出的边界已经收尾相接
BD2=BD;
end
%删除三点共线情况的点
Is3Line=false(size(BD2,1)-1,1);
for k=2:size(BD2,1)-1
if det([ BD2(k-1,:)-BD2(k,:) ; BD2(k+1,:)-BD2(k,:) ])==0
Is3Line(k)=true;%如果三点共线,则叉积等于0
end
end
BD2([Is3Line;true],:)=[];%删除三点共线的那些点
if det([ BD2(end,:)-BD2(1,:) ; BD2(2,:)-BD2(1,:) ])==0
BD2(1,:)=[];%刚才循环没有判断第一个点,重新判断一下
end
NB=size(BD2,1);
%如果边的方向是顺时针方向,则变成逆时针排序方向
xy0=BD2(1,:);
v1_t=BD2(2,:)-xy0;
v2_t=BD2(NB,:)-xy0;
if det([v1_t;v2_t])max_X_BD || ypmax_Y_BD
continue
end
%判断是否是某个顶点
if any(and(xp==BD2(:,1),yp==BD2(:,2)))
%IsOnBD(kp)=true;%如果点是某个边缘顶点,则证明点在边缘
IsInPoly(kp)=true;
continue
end
%判断是否在两端射线范围内
v0_t=xy_k-BD2(1,:);
v1_t=vSum(1,:);
v2_t=vSum(Nv,:);
if det([v1_t;v0_t])>=0 && det([v0_t;v2_t])>=0
%如果在两个夹角范围内,则开始后续的二分法循环
n1=1;
n2=Nv;
else
continue
end
%4开始用二分法判断是否在区间内
while n2-n1>1 %当区间大于1的时候,继续二分
v1_t=vSum(n1,:);
v2_t=vSum(n2,:);
n3=fix((n1+n2)/2);
v3_t=vSum(n3,:);
if det([v1_t;v0_t])>=0 && det([v0_t;v3_t])>=0
%在第一个区间
n1=n1;
n2=n3;
else %在第二个区间
n1=n3;
n2=n2;
end
end
%5二分法结束后,确定该点是否在两个向量所围成的三角形中,
v1_t=vSum(n1,:);
v2_t=vSum(n2,:);
A=[v1_t',v2_t'];
B=[xp-BD2(1,1);yp-BD2(1,2)];
u12=A\B;
if max(u12)<=1 && min(u12)>=0 && sum(u12)<=1
IsInPoly(kp)=true;%如果点在这个三角形内,则证明点在多边形内
end
end
end
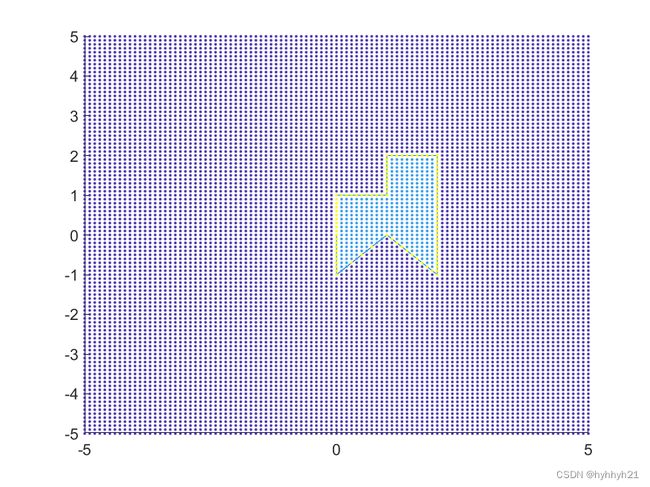
最终结果如下:
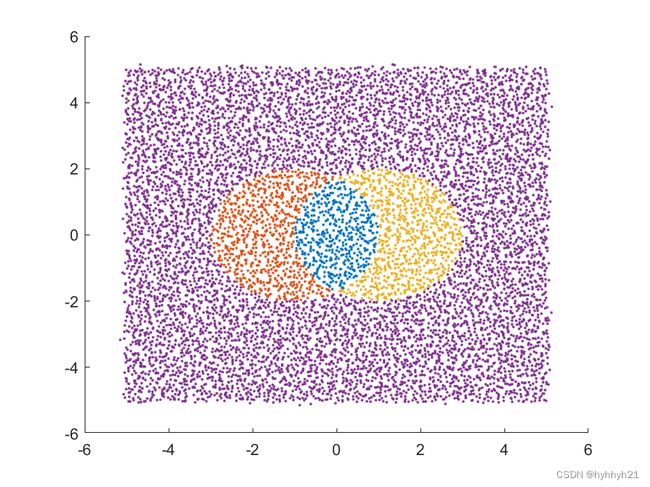
7 多个区域之间
如果涉及到多个区域之间的相互关系,可以用逻辑运算符的交并差操作,来逐步划分出所要选择的区域。
比如下图,就展示了两个图形相交后,各个区域提取的结果:
代码如下:
%多边形定义(连线必须按照首尾相接的顺序)
BD1=[2*cos(0.01:0.01:2*pi)'-1,2*sin(0.01:0.01:2*pi)'];
BD2=[2*cos(0.01:0.01:2*pi)'+1,2*sin(0.01:0.01:2*pi)'];
%要判断的点
[X,Y]=meshgrid(-5:0.1:5,-5:0.1:5);
X=X+randn(size(X))*0.05;
Y=Y+randn(size(Y))*0.05;
xy2=[X(:),Y(:)];
%判断点是否在图形内
IsInPoly1=inpolygon(xy2(:,1),xy2(:,2),BD1(:,1),BD1(:,2));
IsInPoly2=inpolygon(xy2(:,1),xy2(:,2),BD2(:,1),BD2(:,2));
%交集
Area1=and(IsInPoly1,IsInPoly2);
Area2=and(IsInPoly1,~IsInPoly2);
Area3=and(~IsInPoly1,IsInPoly2);
Area4=and(~IsInPoly1,~IsInPoly2);
figure()
hold on
scatter(xy2(Area1,1),xy2(Area1,2),24,1*ones(sum(Area1),1),'Marker','.')
scatter(xy2(Area2,1),xy2(Area2,2),24,2*ones(sum(Area2),1),'Marker','.')
scatter(xy2(Area3,1),xy2(Area3,2),24,3*ones(sum(Area3),1),'Marker','.')
scatter(xy2(Area4,1),xy2(Area4,2),24,4*ones(sum(Area4),1),'Marker','.')
colormap(lines(4))