万字综述,核心开发者全面解读PyTorch内部机制
计算机视觉研究院专栏
作者:Edison_G

斯坦福大学博士生与 Facebook 人工智能研究所研究工程师 Edward Z. Yang 是 PyTorch 开源项目的核心开发者之一。他在 5 月 14 日的 PyTorch 纽约聚会上做了一个有关 PyTorch 内部机制的演讲,本文是该演讲的长文章版本。

计算机视觉研究院
长按扫描关注我们
计算机视觉研究院

大家好!今天我想谈谈 PyTorch 的内部机制。
这份演讲是为用过 PyTorch并且有心为 PyTorch 做贡献但却被 PyTorch 那庞大的 C++ 代码库劝退的人提供的。没必要说谎:PyTorch 代码库有时候确实让人难以招架。
本演讲的目的是为你提供一份导航图:为你讲解一个「支持自动微分的张量库」的基本概念结构,并为你提供一些能帮你在代码库中寻路的工具和技巧。我预设你之前已经写过一些 PyTorch,但却可能还没有深入理解机器学习软件库的编写方式。
本演讲分为两部分:在第一部分中,我首先会全面介绍张量库的各种概念。我首先会谈谈你们知道且喜爱的张量数据类型,并详细讨论这种数据类型究竟能提供什么,这能让我们更好地理解其内部真正的实现方式。
如果你是一位 PyTorch 高级用户,你可能已经熟悉其中大部分材料了。我们也会谈到「扩展点(extension points)」的三个概念、布局(layout)、设备(device)和数据类型(dtype),这能引导我们思考张量类的扩展的方式。在 PyTorch 纽约聚会的现场演讲中,我略过了有关自动梯度(autograd)的幻灯片,但我在这里会进行一些讲解。
第二部分会阐述真正用 PyTorch 写代码时所涉及的基本细节。我会告诉你如何在 autograd 代码中披荆斩棘、什么代码是真正重要的以及怎样造福他人,我还会介绍 PyTorch 为你写核(kernel)所提供的所有炫酷工具。
概念
张量
张量是 PyTorch 中的核心数据结构。对于张量直观上所表示的东西,你可能已有很好的理解:张量是一种包含某种标量类型(比如浮点数和整型数等)的 n 维数据结构。我们可以将张量看作是由一些数据构成的,还有一些元数据描述了张量的大小、所包含的元素的类型(dtype)、张量所在的设备(CPU 内存?CUDA 内存?)
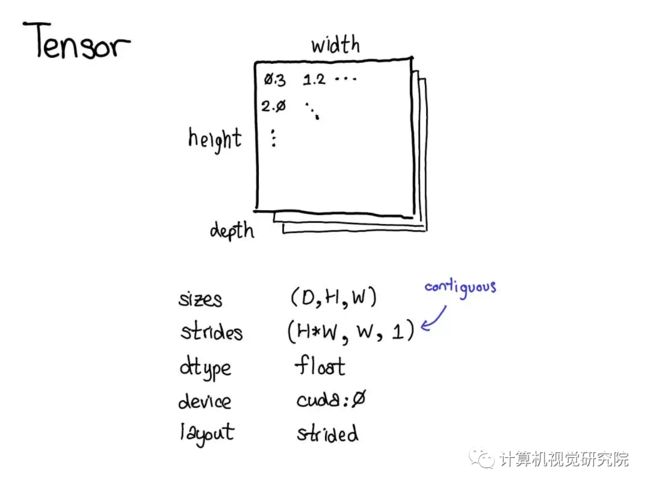
另外还有一个你可能没那么熟悉的元数据:步幅(stride)。stride 实际上是 PyTorch 最别致的特征之一,所以值得稍微多讨论它一些。
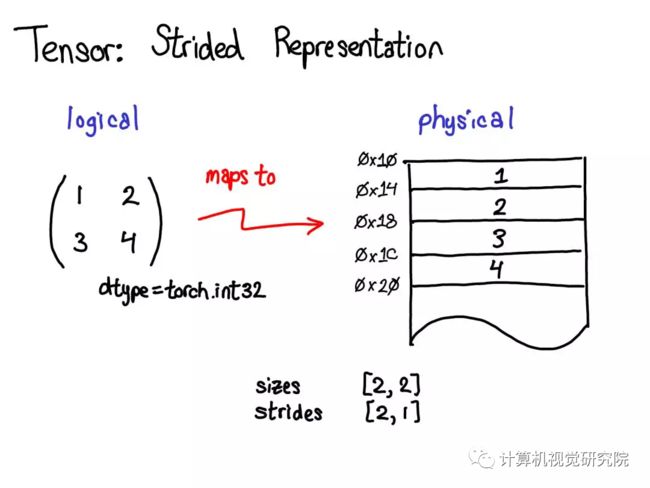
张量一个数学概念。但要在我们的计算机中表示它,我们必须为它们定义某种物理表示方法。最常用的表示方法是在内存中相邻地放置张量的每个元素(这也是术语「contiguous(邻接)」的来源),即将每一行写出到内存,如上所示。在上面的案例中,我已经指定该张量包含 32 位的整型数,这样你可以看到每一个整型数都位于一个物理地址中,每个地址与相邻地址相距 4 字节。为了记住张量的实际维度,我们必须将规模大小记为额外的元数据。
所以这幅图与步幅有什么关系?
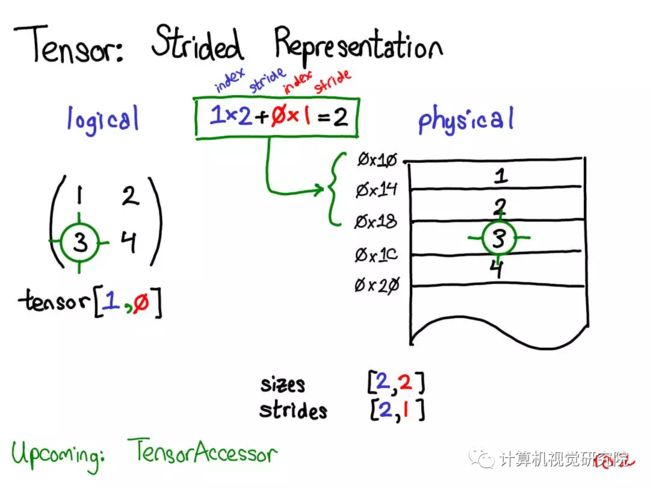
假设我想要读取我的逻辑表示中位置张量 [0,1] 的元素。我该如何将这个逻辑位置转译为物理内存中的位置?步幅能让我们做到这一点:要找到一个张量中任意元素的位置,我将每个索引与该维度下各自的步幅相乘,然后将它们全部加到一起。在上图中,我用蓝色表示第一个维度,用红色表示第二个维度,以便你了解该步幅计算中的索引和步幅。进行这个求和后,我得到了 2(零索引的);实际上,数字 3 正是位于这个邻接数组的起点以下 2 个位置。
(后面我还会谈到 TensorAccessor,这是一个处理索引计算的便利类(convenience class)。当你使用 TensorAccessor 时,不会再操作原始指针,这些计算过程已经为你隐藏了起来。)
步幅是我们为 PyTorch 用户讲解方法的基本基础。举个例子,假设我想取出一个表示以上张量的第二行的张量:
 使用高级的索引支持,我只需写出张量 [1, :] 就能得到这一行。重要的是:当我这样做时,不会创建一个新张量;而是会返回一个基于底层数据的不同域段(view)的张量。这意味着,如果我编辑该视角下的这些数据,它就会反映在原始的张量中。
使用高级的索引支持,我只需写出张量 [1, :] 就能得到这一行。重要的是:当我这样做时,不会创建一个新张量;而是会返回一个基于底层数据的不同域段(view)的张量。这意味着,如果我编辑该视角下的这些数据,它就会反映在原始的张量中。
在这种情况下,了解如何做到这一点并不算太困难:3 和 4 位于邻接的内存中,我们只需要记录一个说明该(逻辑)张量的数据位于顶部以下 2 个位置的偏移量(offset)。(每个张量都记录一个偏移量,但大多数时候它为零,出现这种情况时我会在我的图表中省略它。)
演讲时的提问:如果我取张量的一个域段,我该如何释放底层张量的内存?
答案:你必须制作该域段的一个副本,由此断开其与原始物理内存的连接。你能做的其它事情实际上并不多。另外,如果你很久之前写过 Java,取一个字符串的子字符串也有类似的问题,因为默认不会制作副本,所以子字符串会保留(可能非常大的字符串)。很显然,Java 7u6 将其固定了下来。
如果我想取第一列,还会更有意思:
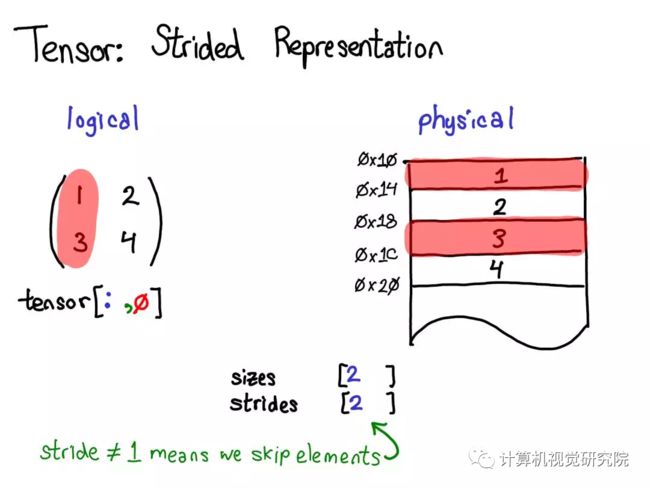
当我们查看物理内存时,可以看到该列的元素不是相邻的:两者之间有一个元素的间隙。步幅在这里就大显神威了:我们不再将一个元素与下一个元素之间的步幅指定为 1,而是将其设定为 2,即跳两步。(顺便一提,这就是其被称为「步幅(stride)」的原因:如果我们将索引看作是在布局上行走,步幅就指定了我们每次迈步时向前多少位置。)
步幅表示实际上可以让你表示所有类型的张量域段;如果你想了解各种不同的可能做法,请参阅 https://ezyang.github.io/stride-visualizer/index.html
我们现在退一步看看,想想我们究竟如何实现这种功能(毕竟这是一个关于内部机制的演讲)。如果我们可以得到张量的域段,这就意味着我们必须解耦张量的概念(你所知道且喜爱的面向用户的概念)以及存储张量的数据的实际物理数据的概念(称为「存储(storage)」):
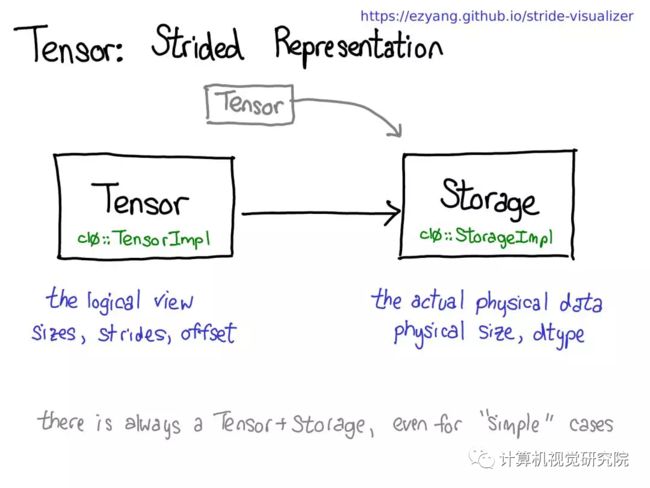 也许会有多个张量共享同一存储。存储会定义张量的 dtype 和物理大小,同时每个张量还会记录大小、步幅和偏移量,这定义的是物理内存的逻辑解释。
也许会有多个张量共享同一存储。存储会定义张量的 dtype 和物理大小,同时每个张量还会记录大小、步幅和偏移量,这定义的是物理内存的逻辑解释。
有一点需要注意:总是会存在一个张量-存储对,即使并不真正需要存储的「简单」情况也是如此(比如,只是用 torch.zeros(2, 2) 划配一个邻接张量时)。
顺便一提,我们感兴趣的不是这种情况,而是有一个分立的存储概念的情况,只是将一个域段定义为有一个基张量支持的张量。这会更加复杂一些,但也有好处:邻接张量可以实现远远更加直接的表示,而没有存储造成的间接麻烦。这样的变化能让 PyTorch 的内部表示方式更接近 Numpy。
我们已经介绍了一些张量的数据布局(有人可能会说,如果你正确地理解了数据表示,其它一切都会自然到位)。但还是有必要简要谈谈如何实现对张量的操作。在最抽象的层面上,当你调用 torch.mm 时,会发生两次调度:
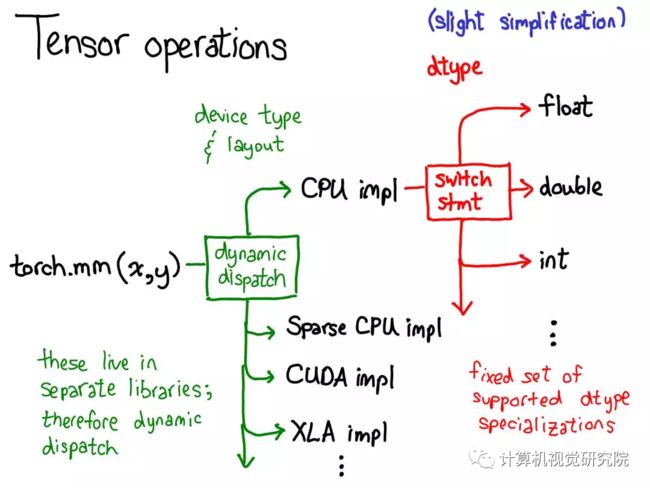
第一次调度基于设备类型和张量布局:比如是 CPU张量还是 CUDA张量,是有步幅的张量还是稀疏的张量。这个调度是动态的:这是一个虚函数(virtual function)调用(这个虚函数调用究竟发生在何处是本演讲后半部分的主题)。
这里需要做一次调度应该是合理的:CPU 矩阵乘法的实现非常不同于 CUDA 的实现。这里是动态调度的原因是这些核(kernel)可能位于不同的库(比如 libcaffe2.so 或 libcaffe2_gpu.so),这样你就别无选择:如果你想进入一个你没有直接依赖的库,你必须通过动态调度抵达那里。
第二次调度是在所涉 dtype 上的调度。这个调度只是一个简单的 switch 语句,针对的是核选择支持的任意 dtype。这里需要调度的原因也很合理:CPU 代码(或 CUDA 代码)是基于 float 实现乘法,这不同于用于 int 的代码。这说明你需要为每种 dtype 都使用不同的核。
如果你想要理解 PyTorch 中算子的调用方式,这可能就是你头脑中应有的最重要的知识。后面当我们更深入代码时还会回到这里。
因为我们已经谈过了张量,所以我还想花点时间谈谈张量扩展。毕竟,除了密集的 CPU 浮点数张量,还有其它很多类型的张量,比如 XLA 张量、量化张量、MKL-DNN 张量;而对于一个张量库,还有一件需要思考的事情:如何兼顾这些扩展?
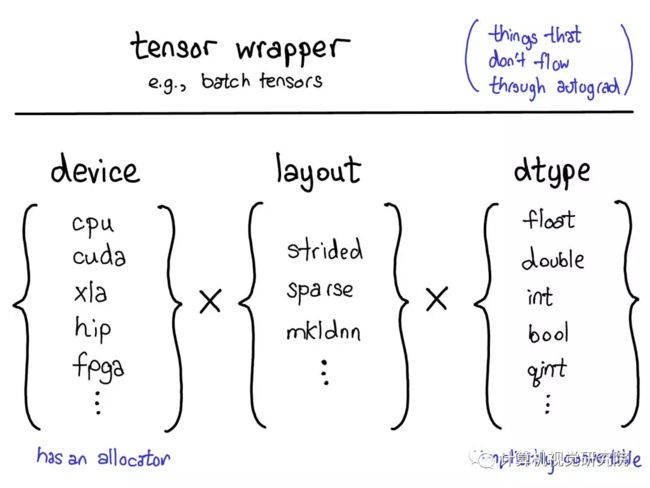
我们当前的用于扩展的模型提供了张量的四个扩展点。首先,有三个独立地确定张量类型的配套参数:
device(设备):描述了实际存储张量的物理内存,比如在 CPU、英伟达 GPU(cuda)、AMD GPU(hip)或 TPU(xla)上。设备之间各不相同的特性是有各自自己的分配器(allocator),这没法用于其它设备。
layout(布局):描述了对物理内存进行逻辑解读的方式。最常用的布局是有步幅的张量(strided tensor),但稀疏张量的布局不同,其涉及到一对张量,一个用于索引,一个用于数据;MKL-DNN张量的布局更加奇特,比如 blocked layout,仅用步幅不能表示它。
dtype(数据类型):描述了张量中每个元素实际存储的数据的类型,比如可以是浮点数、整型数或量化的整型数。
如果你想为 PyTorch 张量添加一种扩展,你应该思考你想要扩展这些参数中的哪几种。这些参数的笛卡尔积定义了你可以得到的所有可能的张量。现在,并非所有这些组合都有核(谁为 FPGA 上的稀疏量化张量用核?),但原则上这种组合可能有意义,因此我们至少应该支持表达它。
要为张量的功能添加「扩展」,还有最后一种方法,即围绕能实现的目标类型的 PyTorch 张量编写一个 wrapper(包装)类。这可能听起来理所当然,但有时候人们在只需要制作一个 wrapper 类时却跑去扩展那三个参数。wrapper 类的一个突出优点是开发结果可以完全不影响原来的类型(out of tree)。
你何时应该编写张量 wrapper,而不是扩展 PyTorch 本身?关键的指标是你是否需要将这个张量传递通过 autograd(自动梯度)反向通过过程。举个例子,这个指标告诉我们稀疏张量应该是一种真正的张量扩展,而不只是一种包含一个索引和值张量的 Python 对象:当在涉及嵌入的网络上执行优化时,我们想要嵌入生成稀疏的梯度。
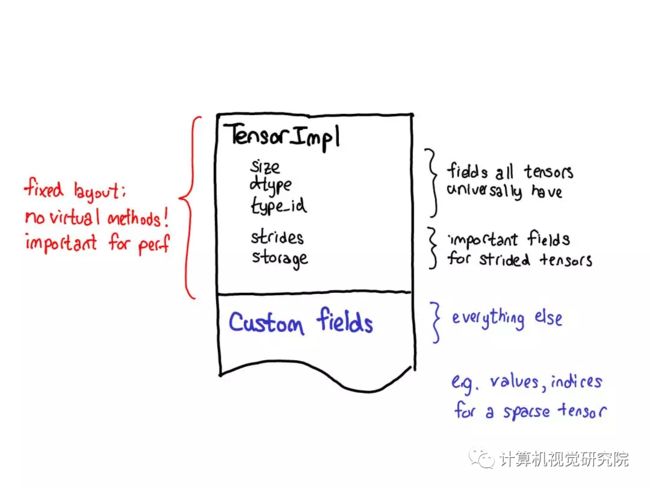
我们对扩展的理念也会影响张量本身的数据布局。对于我们的张量结构,我们真正想要的一件事物是固定的布局:我们不想要基本操作(这个说法很常见),比如「一个张量的大小是多少?」来请求虚调度。
所以当你查看一个张量的实际布局时(定义为 TensorImpl 结构),会看到所有字段的一个公共前缀——我们认为所有类似「张量」的东西都会有;还有一些字段仅真正适用于有步幅的张量,但它们也很重要,所以我们将其保留在主结构中;然后可以在每个张量的基础上完成有自定义字段的后缀。比如稀疏张量可将其索引和值存储在这个后缀中。
自动梯度(autograd)
我已经说明了张量,但如果 PyTorch 仅有这点把戏,这就只不过是 Numpy 的克隆罢了。PyTorch 的显著特性是其在最初发布时就已提供对张量的自动微分(现在我们还有 TorchScript 等炫酷功能,但那时候就只有这个!)
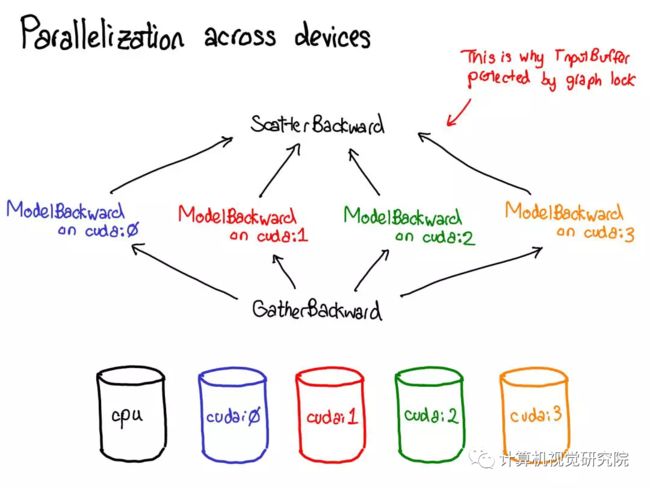
自动微分是做啥?这是负责运行神经网络的机制:
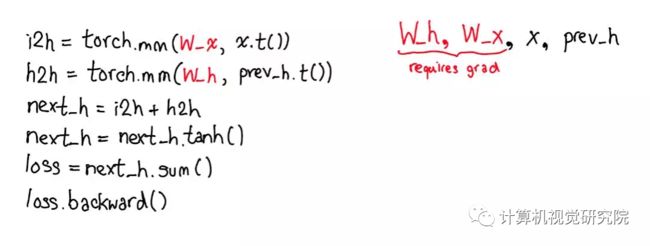
……以及填充实际计算你的网络的梯度时所缺少的代码:
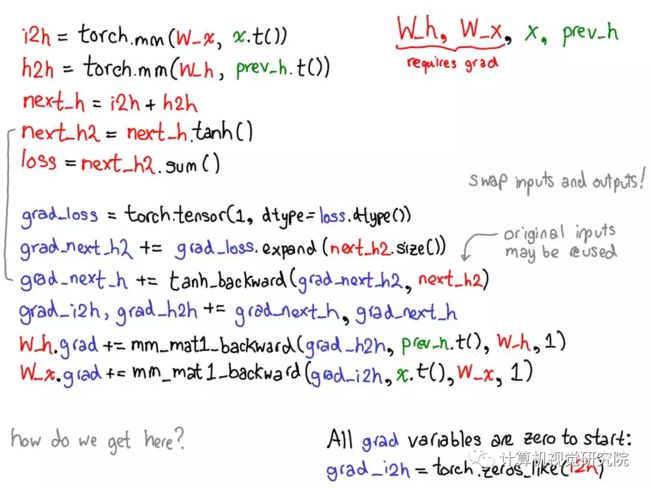
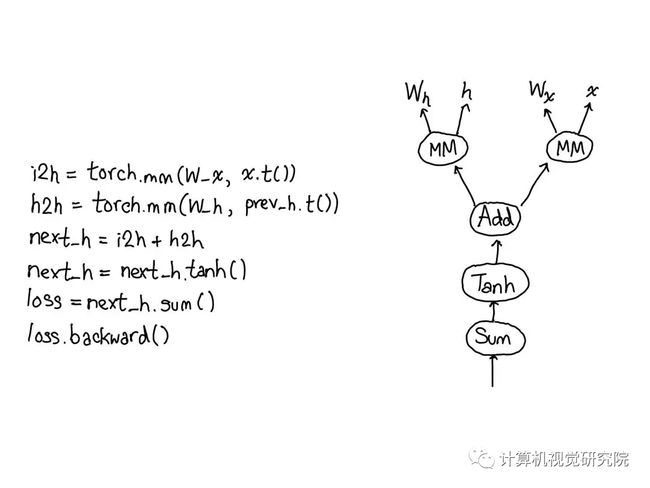
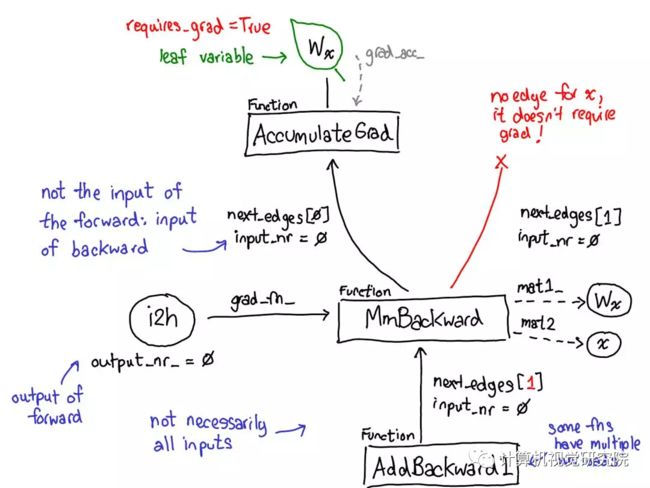
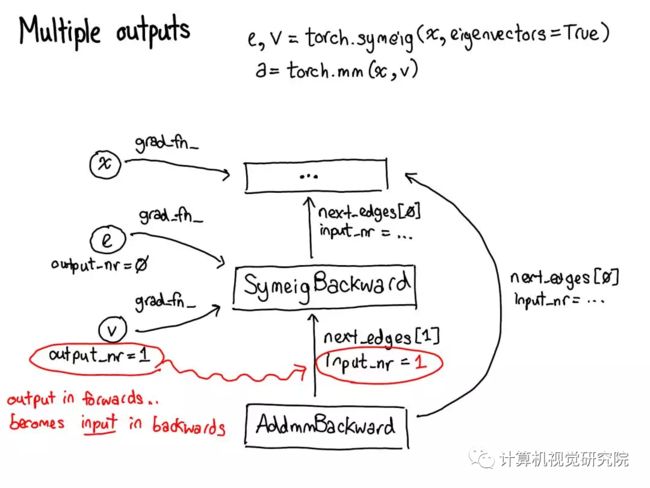
花点时间看看这幅图。其中有很多东西需要解读,我们来看看:
首先将你的目光投向红色和蓝色的变量。PyTorch 实现了反向模式自动微分,这意味着我们可以「反向」走过前向计算来有效地计算梯度。查看变量名就能看到这一点:在红色部分的底部,我们计算的是损失(loss);然后在这个程序的蓝色部分,我们所做的第一件事是计算 grad_loss。loss 根据 next_h2 计算,这样我们可以计算出 grad_next_h2。从技术上讲,我们加了 grad_ 的变量其实并不是梯度,它们实际上左乘了一个向量的雅可比矩阵,但在 PyTorch 中,我们就称之为 grad,基本上所有人都知道这是什么意思。
如果代码的结构保持一样,而行为没有保持一样:来自前向的每一行都被替换为一个不同的计算,其代表了前向运算的导数。举个例子,tanh 运算被转译成了 tanh_backward 运算(这两行用图左边一条灰线连接)。前向和反向运算的输入和输出交换:如果前向运算得到 next_h2,反向运算就以 grad_next_h2 为输入。
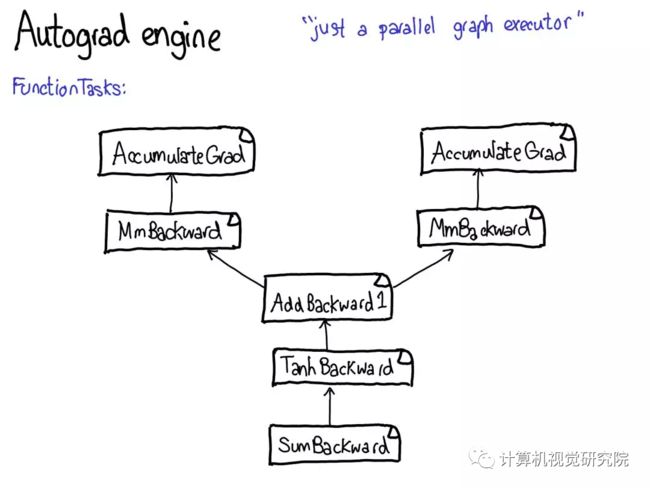
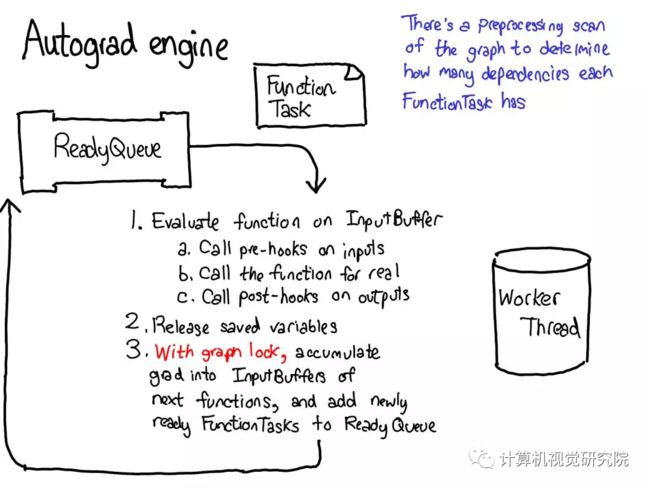
autograd 的意义就在于执行这幅图所描述的计算,但却不用真正生成这个源。PyTorch autograd 并不执行源到源的变换(尽管 PyTorch JIT 确实知道如何执行符号微分(symbolic differentiation))。
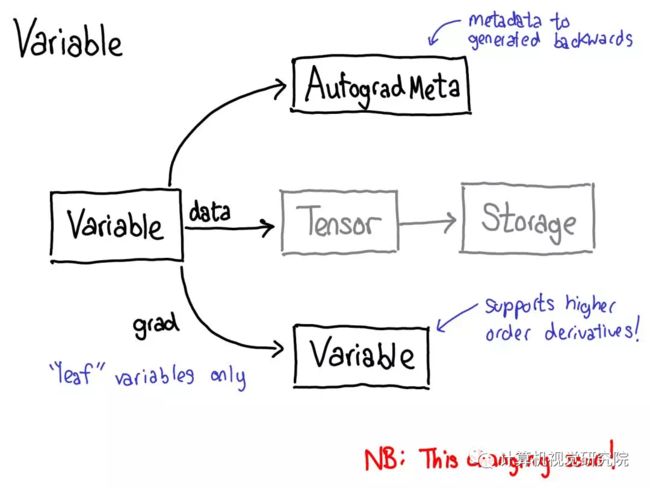
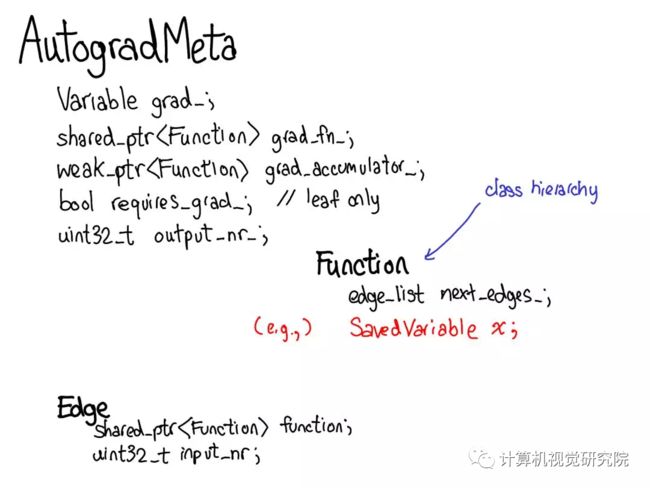
要做到这一点,我们需要在张量上执行运算时存储更多元数据。让我们调整一下我们对张量数据结构的图:现在不只是一个指向存储的张量,我们还有一个包装这个张量的变量,而且也存储更多信息(AutogradMeta),这是用户在自己的 PyTorch 脚本中调用 loss.backward() 执行 autograd 时所需的。
这张幻灯片的内容在不久的将来就会过时。Will Feng 在简单融合了 PyTorch 的前端端口之后,正在推动 C++ 中变量和张量的融合:https://github.com/pytorch/pytorch/issues/13638。
我们也必须更新上面关于调度的图:
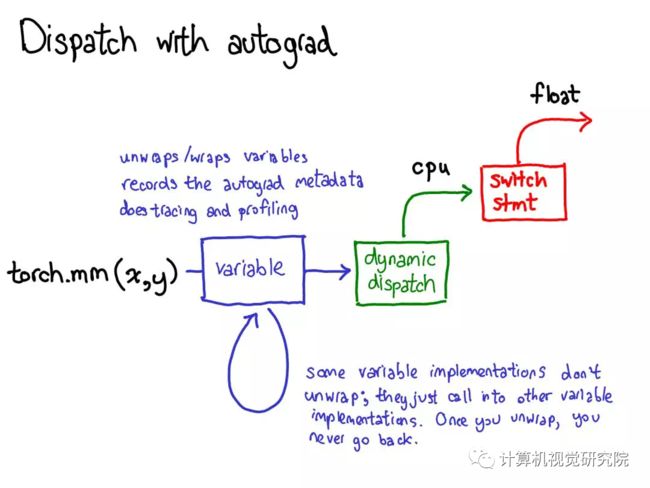
在我们调度到 CPU 或 CUDA 实现之前,还有另一个对变量的调度,其负责打开(unwrap)变量,调用底层实现(绿色),然后再重新将结果包装进变量并为反向过程记录必需的 autograd 元数据。
某些实现不会 unwrap;它们只是调用其它变量实现。所以你可能要在变量宇宙中花些时间。但是,一旦你 unwrap 并进入了非变量张量宇宙,你就到达终点了;你再也不用退回变量(除非从你的函数返回)。
在我的纽约聚会演讲中,我跳过了以下七页幻灯片。对它们的文本介绍还要等一段时间。
工程开发
说够了概念,我们来看看代码。
找到你的路径
PyTorch 有大量文件夹,在 CONTRIBUTING.md 文档中有对它们的非常详细的描述,但实际上你只需知晓 4 个目录:
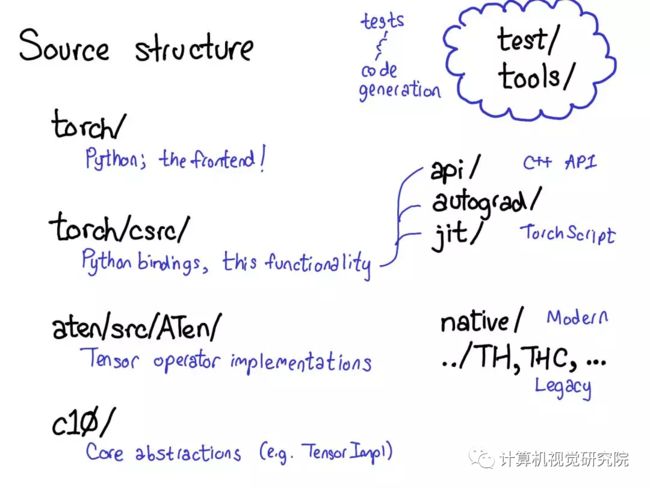
首先,torch/ 包含你最熟悉的东西:你导入和使用的实际的 Python 模块。这些东西是 Python 代码而且易于操作(只需要进行修改然后查看结果即可)。但是,如果太过深入……
torch/csrc/:实现了你可能称为 PyTorch 前端的 C++ 代码。用更描述性的术语讲,它实现了在 Python 和 C++ 间转换的绑定代码(binding code);另外还有一些相当重要的 PyTorch 部分,比如 autograd 引擎和 JIT 编译器。它也包含 C++ 前端代码。
aten/:这是「A Tensor Library」的缩写(由 Zachary DeVito 命名),是一个实现张量运算的 C++ 库。如果你检查某些核代码所处的位置,很可能就在 ATen。ATen 本身就分为两个算子区域:「原生」算子(算子的现代的 C++ 实现)和「传统」算子(TH、THC、THNN、THCUNN),这些是遗留的 C 实现。传统的算子是其中糟糕的部分;如果可以,请勿在上面耗费太多时间。
c10/:这是「Caffe2」和「A"Ten"」的双关语,包含 PyTorch 的核心抽象,包括张量和存储数据结构的实际实现。
找代码需要看很多地方;我们应该简化目录结构,就是这样。如果你想研究算子,你应该在 aten 上花时间。
我们看看在实践中是如何分离这些代码的:
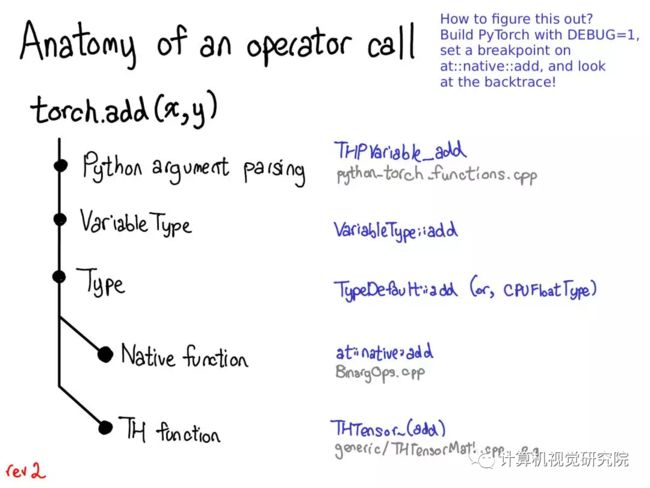
当你调用一个函数时,比如 torch.add,会发生什么?如果你记得我们的有关调度的讨论,你脑中应该已有了这些基础:
我们必须从 Python 国度转换到 C++ 国度(Python 参数解析)。
我们处理变量调度(VariableType—Type,顺便一提,和编程语言类型并无特别关联,只是一个用于执行调度的小工具)。
我们处理设备类型/布局调度(Type)。
我们有实际的核,这要么是一个现代的原生函数,要么是传统的 TH 函数。
其中每一步都具体对应于一些代码。让我们开路穿过这片丛林。
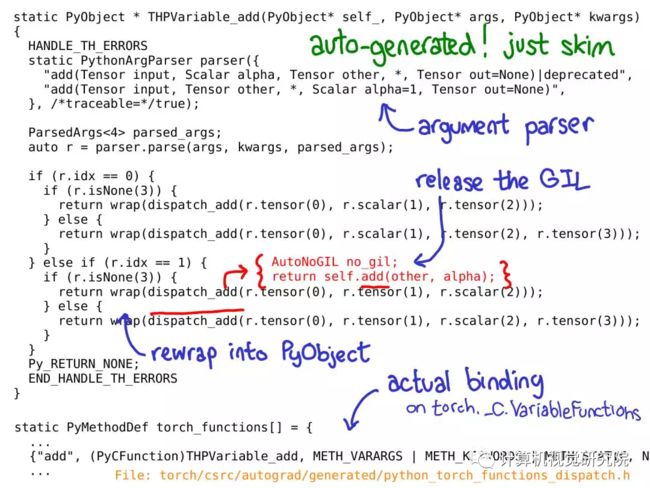
我们在 C++ 代码中的起始着陆点是一个 Python 函数的 C 实现,我们已经在 Python 那边见过它,像是 torch._C.VariableFunctions.add。THPVariable_add 就是这样一个实现。
对于这些代码,有一点很重要:这些代码是自动生成的。如果你在 GitHub 库中搜索,你没法找到它们,因为你必须实际 build PyTorch 才能看到它们。另外一点也很重要:你不需要真正深入理解这些代码是在做什么,你应该快速浏览它,知道它的功能。
我在上面用蓝色标注了最重要的部分:你可以看到这里使用了一个 PythonArgParser 类来从 Python args 和 kwargs 取出 C++ 对象;然后我们调用一个 dispatch_add 函数(红色内联);这会释放全局解释器锁,然后调用在 C++ 张量自身上的一个普通的旧方法。在其回来的路上,我们将返回的 Tensor 重新包装进 PyObject。
(这里幻灯片中有个错误:我应该讲解变量调度代码。我这里还没有修复。某些神奇的事发生了,于是……)
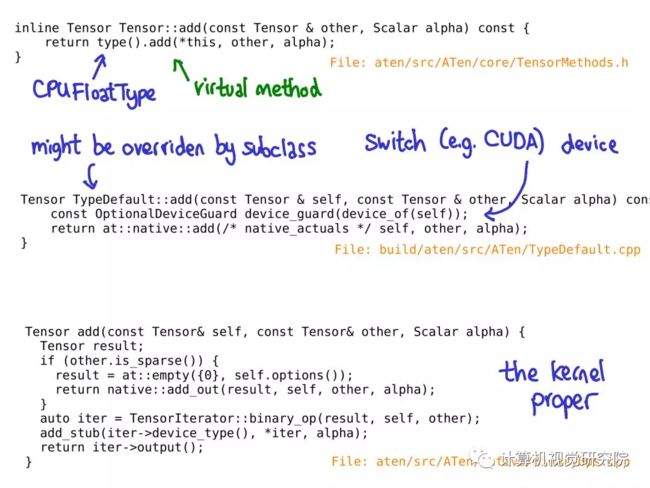
当我们在 Tensor 类上调用 add 方法时,还没有虚调度发生。相反,我有一个内联方法,其调用了一个内联方法,其会在「Type」对象上调用一个虚方法。这个方法是真正的虚方法(这就是我说 Type 只是一个让你实现动态调度的「小工具」的原因)。
在这个特定案例中,这个虚调用会调度到在一个名为 TypeDefault 的类上的 add 的实现。这刚好是因为我们有一个对所有设备类型(CPU 和 CUDA)都一样的 add 的实现;如果我们刚好有不同的实现,我们可能最终会得到 CPUFloatType::add 这样的结果。正是这种虚方法的实现能让我们最终得到实际的核代码。
也希望这张幻灯片很快过时;Roy Li 正在研究使用另一种机制替代 Type调度,这能让我们更好地在移动端上支持 PyTorch。
值得再次强调,一直到我们到达核,所有这些代码都是自动生成的。
道路蜿蜒曲折,一旦你能基本上把握方向了,我建议你直接跳到核部分。
编写核(kernel)
PyTorch 为有望编写核的人提供了大量有用工具。在这一节我们会了解其中一些。但首先,编写核需要什么?
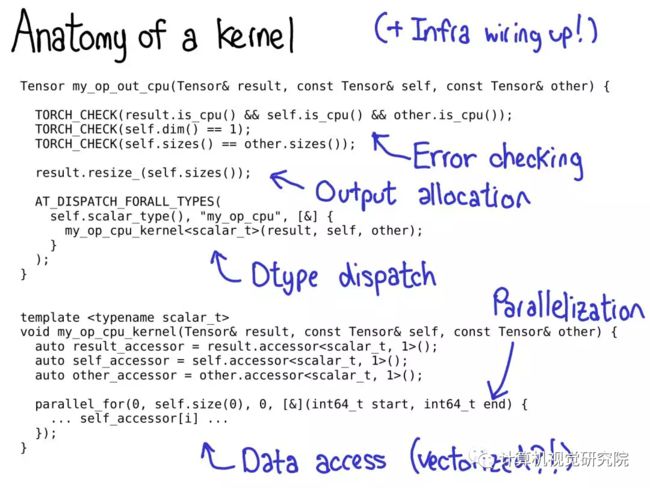
我们一般将 PyTorch 中的核看作由以下部分组成:
首先有一些我们要写的有关核的元数据,这能助力代码生成并让你获取所有与 Python 的捆绑包,同时无需写任何一行代码。
一旦你到达了核,你就经过了设备类型/布局调度。你首先需要写的是错误检查,以确保输入的张量有正确的维度。(错误检查真正很重要!不要吝惜它!)
接下来,我们一般必须分配我们将要写入输出的结果张量。
该到写核的时候了。现在你应该做第二次 dtype调度,以跳至其所操作的每个 dtype 特定的核。(你不应该过早做这件事,因为那样的话你就会毫无用处地复制在任何情况下看起来都一样的代码。)
大多数高性能核都需要某种形式的并行化,这样就能利用多 CPU 系统了。(CUDA 核是「隐式」并行化的,因为它们的编程模型构建于大规模并行化之上。)
最后,你需要读取数据并执行你想做的计算!
在后面的幻灯片中,我将介绍 PyTorch 中能帮你实现这些步骤的工具。
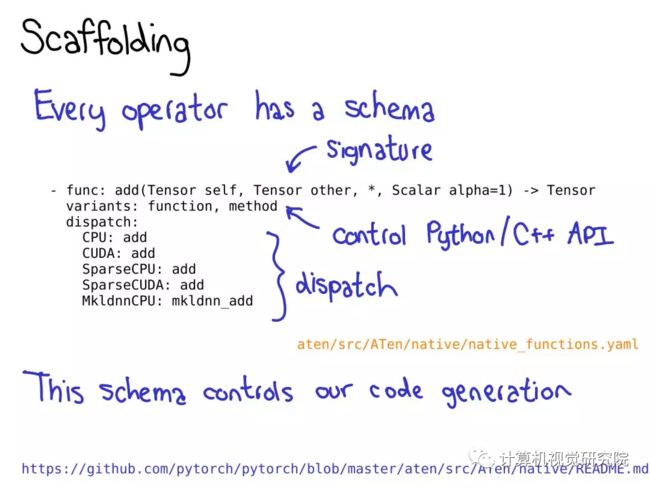
要充分利用 PyTorch 的代码生成能力,你需要为你的算子写一个模式(schema)。这个模式能提供你的函数的 mypy 风格类型,并控制是否为 Tensor 上的方法或函数生成捆绑包。你还可以告诉模式针对给定的设备-布局组合,应该调用你的算子的哪种实现。
有关这种格式的更多信息,请参阅:https://github.com/pytorch/pytorch/blob/master/aten/src/ATen/native/README.md
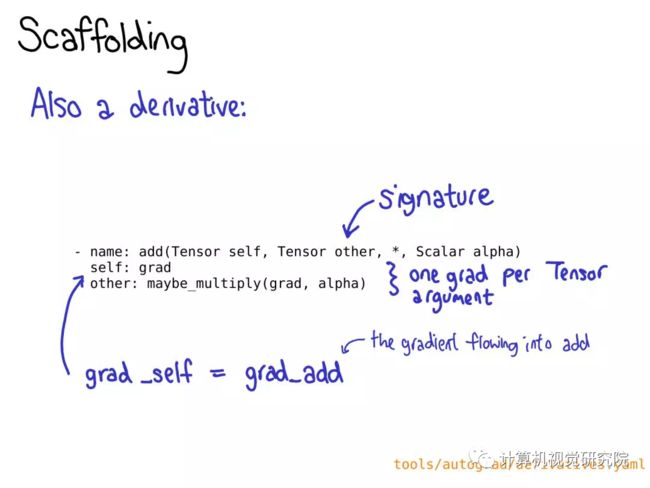
你可能也需要为你在 derivatives.yaml 中的操作定义一个导数。
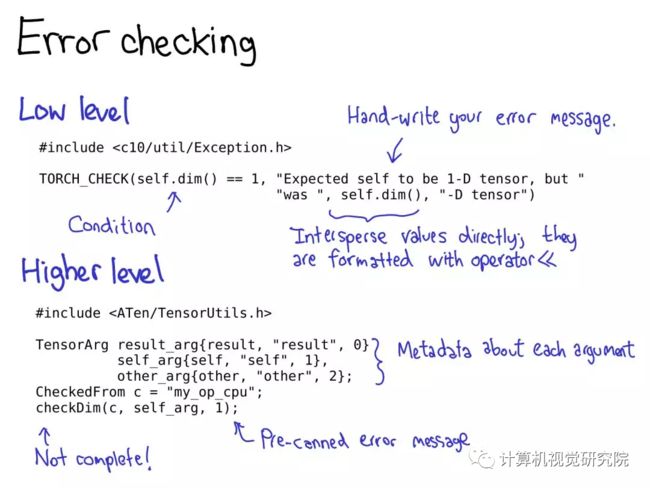
错误检查可以在低层 API 完成,也能通过高层 API 实现。低层 API 只是一个宏 TORCH_CHECK,其接收的是一个布尔值,然后还有任意数量的参数构成错误字符串(error string)以便得出结论看该布尔值是否为真。
这个宏有个很好的地方:你可以将字符串与非字符串数据混合起来;每一项都使用它们的 operator<< 实现进行格式化,PyTorch 中大多数重要的数据类型都有 operator<< 实现。
高层 API 能让你免于反复编写重复的错误消息。其工作方法是;你首先将每个张量包装为 TensorArg,这包含有关张量来处的信息(比如其参数名称)。然后它提供了一些预先装好的用于检查多种属性的函数;比如 checkDim() 测试的是张量的维度是否是一个固定数值。如果不是,该函数就基于 TensorArg 元数据提供一个用户友好的错误消息。
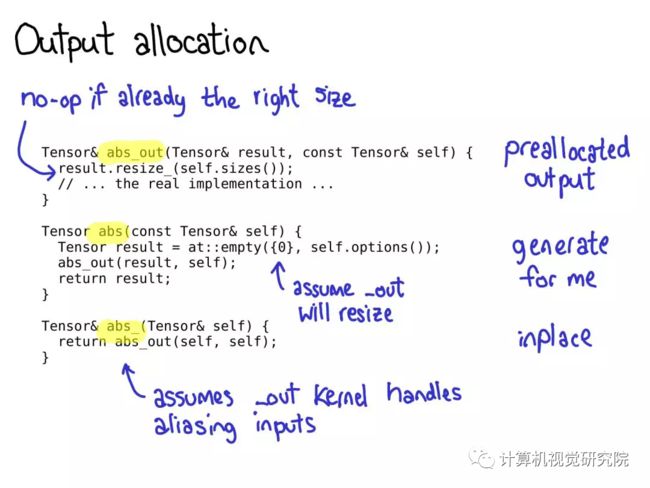
在用 PyTorch 写算子时,有一点很重要:你往往要注册三个算子:abs_out(其操作的是一个预分配的输出,其实现了 out= keyword 参数)、abs_(其操作的是 inplace)、abs(这只是一个算子的普通的旧功能版本)。
大部分时间,abs_out 是真正的主力,abs 和 abs_ 只是围绕 abs_out 的薄弱 wrapper;但有时候也可为每个案例编写专门的实现。
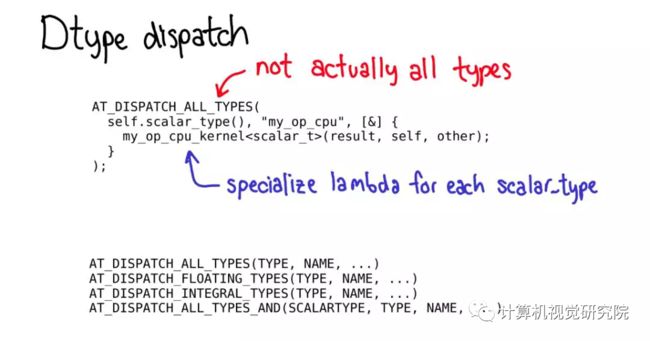
要执行 dtype 调度,你应该使用 AT_DISPATCH_ALL_TYPES 宏。这会获取你想要进行调度操作的张量的 dtype,并还会为可从该宏调度的每个 dtype 指定一个 lambda。通常而言,这个 lambda 只是调用一个模板辅助函数。
这个宏不只是「执行调度」,它也会决定你的核将支持的 dtype。这样,这个宏实际上就有相当多一些版本,这能让你选取不同的 dtype 子集以生成特定结果。大多数时候,你只需要 AT_DISPATCH_ALL_TYPES,但也要关注你可能需要调度其它更多类型的情况。
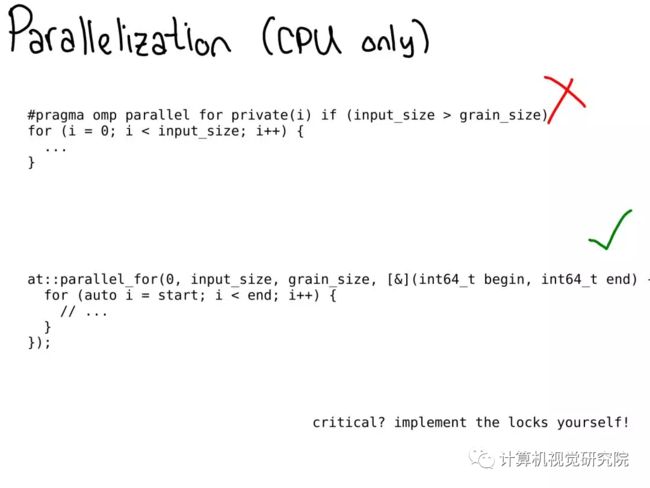
在 CPU 上,你通常需要并行化你的代码。过去,这通常是通过直接在你的代码中添加 OpenMP pragma 来实现。
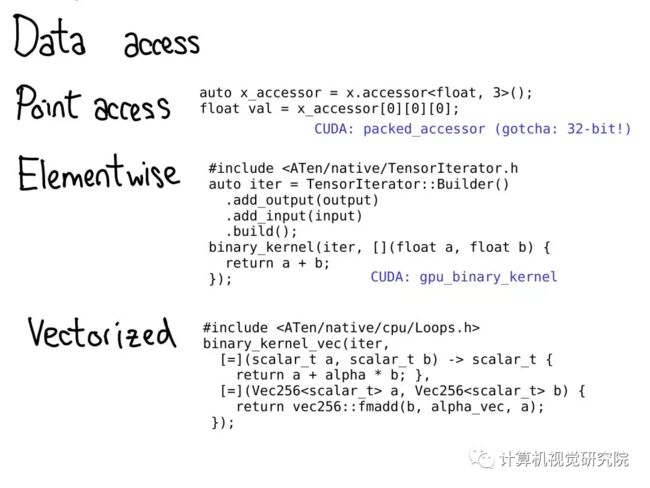
某些时候,你必须真正访问数据。PyTorch 为此提供了相当多一些选择。
如果你只想获取某个特定位置的值,你应该使用 TensorAccessor。张量存取器就像是一个张量,但它将张量的维度和 dtype 硬编码为了模板参数。当你检索一个存取器时,比如 x.accessor
();,我们会做一次运行时间测试以确保张量确实是这种格式;但那之后,每次存取都不会被检查。张量存取器能正确地处理步幅,因此你最好使用它们,而不是原始的指针访问(不幸的是,很多传统的核是这样做的)。另外还有 PackedTensorAccessor,这特别适用于通过 CUDA launch 发送存取器,这样你就能从你的 CUDA 核内部获取存取器。(一个值得一提的问题:TensorAccessor 默认是 64 位索引,这比 CUDA 中的 32 位索引要慢得多!)
如果你在用很常规的元素存取编写某种算子,比如逐点运算,那么使用远远更高级的抽象要好得多,比如 TensorIterator。这个辅助类能为你自动处理广播和类型提升(type promotion),相当好用。
要在 CPU 上获得真正的速度,你可能需要使用向量化的 CPU 指令编写你的核。我们也有用于这方面的辅助函数!Vec256 类表示一种标量向量,并提供了一些能在它们上一次性执行向量化运算的方法。然后 binary_kernel_vec 等辅助函数能让你轻松地运行向量化运算,然后结束那些没法用普通的旧指令很好地转换成向量指令的东西。这里的基础设施还能在不同指令集下多次编译你的核,然后在运行时间测试你的 CPU 支持什么指令,再在这些情况中使用最佳的核。
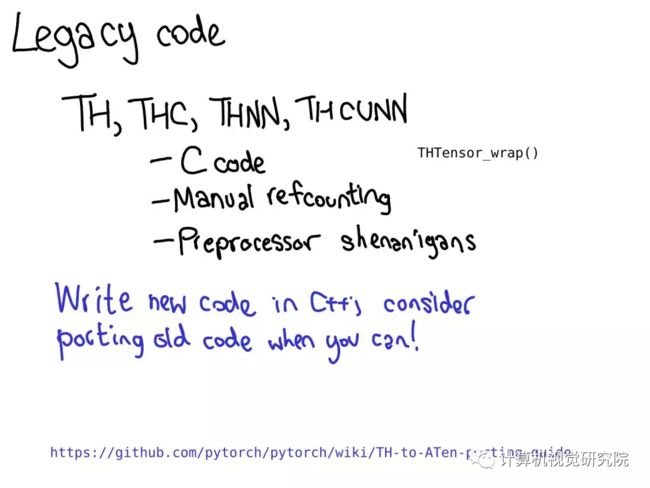
PyTorch 中大量核都仍然是用传统的 TH 风格编写的。(顺便一提,TH 代表 TorcH。这是个很好的缩写词,但很不幸被污染了;如果你看到名称中有 TH,可认为它是传统的。)传统 TH 风格是什么意思呢?
它是以 C 风格书写的,没有(或很少)使用 C++。
其 refcounted 是人工的(使用了对 THTensor_free 的人工调用以降低你使用张量结束时的 refcounts)。
其位于 generic/ 目录,这意味着我们实际上要编译这个文件很多次,但要使用不同的 #define scalar_t
这种代码相当疯狂,而且我们讨厌回顾它,所以请不要添加它。如果你想写代码但对核编写了解不多,你能做的一件有用的事情:将某些 TH 函数移植到 ATen。
工作流程效率
最后我想谈谈在 PyTorch 上的工作效率。如果 PyTorch 那庞大的 C++ 代码库是阻拦人们为 PyTorch 做贡献的第一只拦路虎,那么你的工作流程的效率就是第二只。如果你想用 Python 习惯开发 C++,那可能会很艰辛:重新编译 PyTorch 需要大量时间,你也需要大量时间才能知道你的修改是否有效。
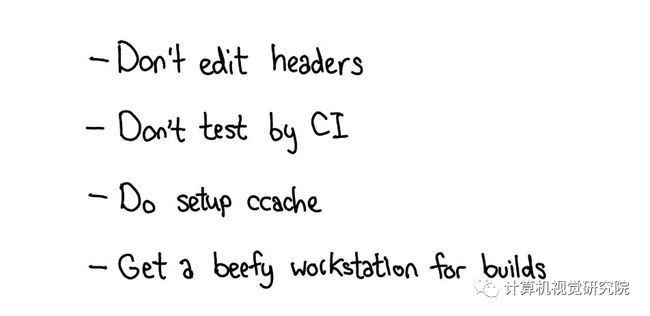
如何高效工作本身可能就值得做一场演讲,但这页幻灯片总结了一些我曾见过某些人抱怨的最常见的反模式:「开发 PyTorch 很困难。」
如果你编辑一个 header,尤其是被许多源文件包含的 header(尤其当被 CUDA 文件包含时),可以预见会有很长的重新 build 时间。尽量只编辑 cpp 文件,编辑 header 要审慎!
我们的 CI 是一种非常好的零设置的测试修改是否有效的方法。但在获得返回信号之前你可能需要等上一两个小时。如果你在进行一种将需要大量实验的改变,那就花点时间设置一个本地开发环境。类似地,如果你在特定的 CI 配置上遇到了困难的 debug 问题,就在本地设置它。你可以将 Docker 镜像下载到本地并运行:https://github.com/pytorch/ossci-job-dsl
贡献指南解释了如何设置 ccache:https://github.com/pytorch/pytorch/blob/master/CONTRIBUTING.md#use-ccache ;强烈建议这个,因为这可以让你在编辑 header 时幸运地避免大量重新编译。当我们在不应该重新编译文件时重新编译时,这也能帮你覆盖我们的 build 系统的漏洞。
最后,我们会有大量 C++ 代码。如果你是在一台有 CPU 和 RAM 的强大服务器上 build,那么会有很愉快的体验。特别要说明,我不建议在笔记本电脑上执行 CUDA build。build CUDA 非常非常慢,而笔记本电脑往往性能不足,不足以快速完成。
参与进来!
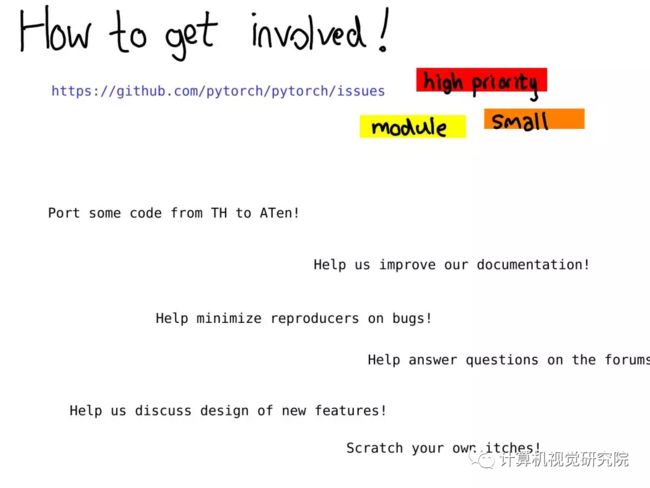
这就是我们旋风一般的 PyTorch 内核之旅了!其中省略了很多很多东西;但希望这里的描述和解释至少能帮你消化其代码库中相当大一部分。
我们开创“计算机视觉协会”知识星球一年有余,也得到很多同学的认可,我们定时会推送实践型内容与大家分享,在星球里的同学可以随时提问,随时提需求,我们都会及时给予回复及给出对应的答复。

如果想加入我们“计算机视觉研究院”,请扫二维码加入我们。我们会按照你的需求将你拉入对应的学习群!
计算机视觉研究院主要涉及深度学习领域,主要致力于人脸检测、人脸识别,多目标检测、目标跟踪、图像分割等研究方向。研究院接下来会不断分享最新的论文算法新框架,我们这次改革不同点就是,我们要着重”研究“。之后我们会针对相应领域分享实践过程,让大家真正体会摆脱理论的真实场景,培养爱动手编程爱动脑思考的习惯!
计算机视觉研究院
长按扫描维码
计算机视觉研究院