机器之心报道
机器之心编辑部
走机器的路,让你看一下。
在机器人研究领域,给定某一特定任务之后,如何规划机器人的运动方式至关重要。
最近,GitHub 上开源了一个存储库,该库实现了机器人技术中常用的一些路径规划算法,大部分代码是用 Python 实现的。值得一提的是,开发者用 plotting 为每种算法演示了动画运行过程,直观清晰。
项目地址:
该开源库中实现的路径规划算法包括基于搜索和基于采样的规划算法,具体目录如下图所示:
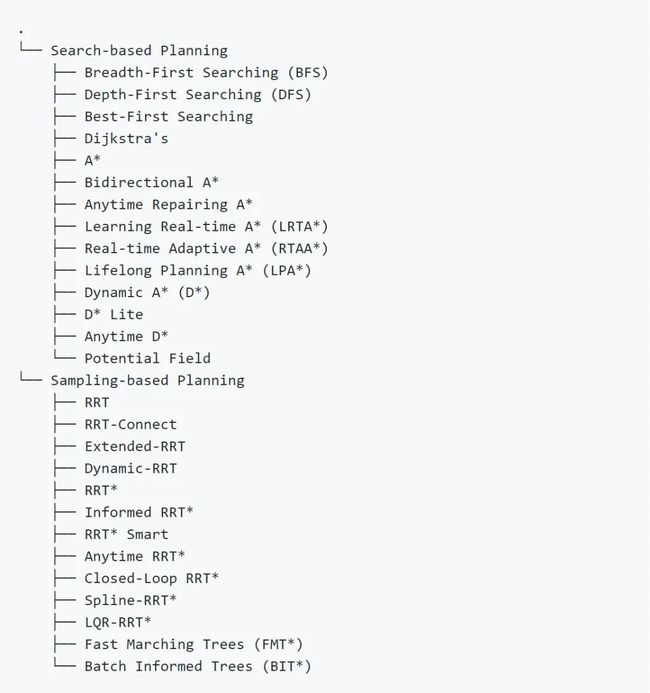
基于搜索的路径规划算法
基于搜索的路径规划算法已经较为成熟且得到了广泛应用,常常被用于游戏中人物和移动机器人的路径规划。
最佳路径优先搜索算法
Dijkstra算法
A* 搜索算法

双向A * 搜索算法

重复A * 搜索算法
AnytimeRepairing A* (ARA*) 搜索算法
实时学习A * 搜索(LRTA*)算法

实时适应性A * 搜索(RTAA*)算法
动态A * 搜索(D*)算法

终身规划A * 搜索算法
AnytimeD * 搜索算法:变动较小
AnytimeD * 搜索算法:变动较大
基于采样的路径规划算法
与基于搜索不同,基于采样的路径规划算法不需要显式构建整个配置空间和边界,并且在高维度的规划问题中得到广泛应用。
快速随机搜索树(RRT)算法

目标偏好RRT 算法

双向快速扩展随机树(RRT_CONNECT)算法
Extended_RRT算法
动态RRT 算法
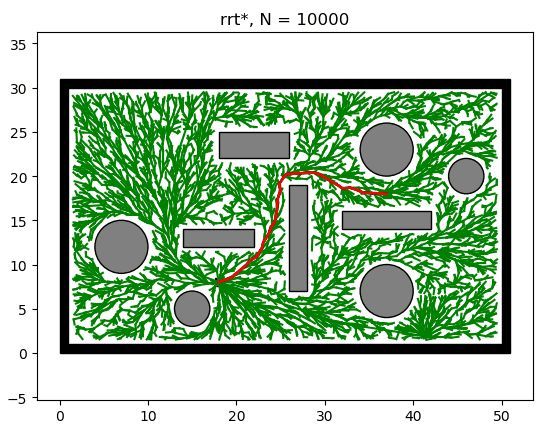
N= 10000 时,rrt * 算法
N= 1000 时,rrt*-Smart 算法

快速行进树(FMT*)算法
N=1000 时,Informed rrt * 算法
BatchInformed 树(BIT*)算法

参考链接:
https://blog.csdn.net/RoboChengzi/article/details/104096663
http://www.chenjianqu.com/show-137.html
Amazon SageMaker实战教程(视频回顾)
Amazon SageMaker 是一项完全托管的服务,可以帮助机器学习开发者和数据科学家快速构建、训练和部署模型。Amazon SageMaker 完全消除了机器学习过程中各个步骤的繁重工作,让开发高质量模型变得更加轻松。
10月15日-10月22日,机器之心联合AWS举办3次线上分享,全程回顾如下,复制链接到浏览器即可观看。
另外,我们准备了Amazon SageMaker 1000元服务抵扣券,帮助开发者体验各项功能。

第一讲:AmazonSageMaker Studio详解
主要介绍相关组件,如studio、autopilot等,并通过在线演示展示这些核心组件对AI模型开发效率的提升。
视频回顾地址:
第二讲:使用Amazon SageMaker 构建一个情感分析「机器人」
主要介绍情感分析任务背景、进行基于Bert的情感分析模型训练、利用AWS数字资产盘活解决方案进行基于容器的模型部署。
视频回顾地址:
第三讲:DGL图神经网络及其在Amazon SageMaker上的实践
主要介绍图神经网络、DGL在图神经网络中的作用、图神经网络和DGL在欺诈检测中的应用和使用Amazon SageMaker部署和管理图神经网络模型的实时推断。
视频回顾地址: