STM32智能小车------PWM驱动直流电机
文章目录
- 一、硬件连接
-
- 1.器件清单:
- 2.接线:
- 3.驱动电机
- 二、软件驱动代码编写
-
- 1.初始化代码
- 2.电机驱动代码
- 总结
- 大家好哇!我是小光,嵌入式爱好者,一个想要成为系统架构师的普通大学生。
- 进入正题,最近在做小车,目前已经可以跑起来了,然后就是加入各种各样的传感器,使得她的功能更加丰富。
- 本次就谈谈做小车中的第一步,也是最重要的一步:PWM驱动直流减速电机,也是就让小车跑起来。
- 非常感谢大家的阅读,如果有不对的地方欢迎指正
一、硬件连接
1.器件清单:
1.STM32F103C8T6最小系统板
2.直流减速电机
3.TB6612FNG驱动模块
2.接线:

接线方式1(PWM驱动电机):
PWMA----PA11:接板子可设置PWM的IO口,
PWMA----PA2:接板子可设置PWM的IO口;
STBY------3.3v:使能;
AIN1-------PB12:普通IO口;
AIN2-------PB13:普通IO口;
BIN1-------PB14:普通IO口;
BIN2-------PB15:普通IO口;
VM---------12V电源正极:供电;
GND-------电源负极;
VCC--------板子5V;
GND--------板子GND;
A1(AO1)————电机1(无正负)
A2(AO2)————电机1(无正负,和正传反转有关)
B1(BO1)————电机2(无正负)
B2(BO2)————电机2(无正负,和正传反转有关)
注意:TB6612一定要和板子共地;
接线方式2(不空速):
不用接PWMA和PWMB就可以了。
3.驱动电机
现在就说说为什么这样接线吧:
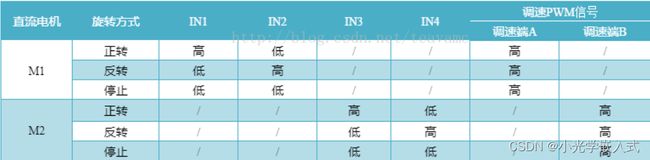
我们只需要让四个IO输出相应的高低电平,然后通过PWM调速,就可以让小车动起来了,是不是很简单(狗头保命),好了,下面开始讲解软件部分。
二、软件驱动代码编写
1.初始化代码
代码示例:
void Motor_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50M
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB
PWM_Init(arr,psc);
}
这就是很简单的GPIO初始化啦,然后就是PWM初始化:
/**************************************************************************
函数功能:控制电机的两路PWM初始化
入口参数:无
返回 值:无
**************************************************************************/
void PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//使能GPIO和定时器时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM1 CH4和TIM2 CH3的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_11; //TIM_CH1 //TIM_CH4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//初始化定时器arr、psc
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化比较参数
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC4Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
//MOE 主输出使能
TIM_CtrlPWMOutputs(TIM1,ENABLE);
//CH4预装载使能
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable);
//使能TIMx在ARR上的预装载寄存器
TIM_ARRPreloadConfig(TIM1, ENABLE);
//使能TIM1
TIM_Cmd(TIM1, ENABLE);
//TIM2_CH3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC3Init(TIM2, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_CtrlPWMOutputs(TIM2,ENABLE); //MOE 主输出使能
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); //CH3预装载使能
TIM_ARRPreloadConfig(TIM2, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM2, ENABLE); //使能TIM2
}
大家可以仔细看看注释,这里我用的是PA11(TIM1 CH4)和 PA2(TIM2 CH3),这样我们就初始化完了。
2.电机驱动代码
.h文件:
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<>第五章(87页~92页).
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PWMA TIM2->CCR3 //PA2
#define AIN2 PBout(15)
#define AIN1 PBout(14)
#define BIN1 PBout(13)
#define BIN2 PBout(12)
#define PWMB TIM1->CCR4 //PA11
void Set_Pwm(int moto1,int moto2);
int myabs(int a);
这里我用了PB12-15作为输入的引脚,大家也可以用其他的引脚,只是需要把宏定义改一下就可以了
.c文件:
/**************************************************************************
函数功能:赋值给PWM寄存器
入口参数:左轮PWM、右轮PWM
返回 值:无
**************************************************************************/
void Set_Pwm(int motorLeft,int motorRight)
{
if(motorLeft>0) AIN2=0, AIN1=1;
else if(motorLeft == 0) AIN2=0, AIN1=0;
else AIN2=1, AIN1=0;
PWMA=myabs(motorLeft);
if(motorRight>0) BIN1=0, BIN2=1;
else if(motorRight == 0) BIN1=0, BIN2=0;
else BIN1=1, BIN2=0;
PWMB=myabs(motorRight);
}
/**************************************************************************
函数功能:绝对值函数
入口参数:int
返回 值:unsigned int
**************************************************************************/
int myabs(int a)
{
int temp;
if(a<0)
temp=-a;
else
temp=a;
return temp;
}
这个函数void Set_Pwm(int motorLeft,int motorRight)就是根据TB6612驱动电机的原理编写的代码,方便我们控制电机。
我们调用时直接SetPwm(LeftSpeed,RightSpeed);就可以了,是不是很简单呢?(狗头保命);
总结
奉上视频:
你见过会说话的小车吗