特斯拉HW4.0揭开面纱,除了5MP摄像头/7nm芯片还有高分辨率雷达?
进入2022年,头部汽车制造商陆续量产或公布下一代智能驾驶系统的设计。
其中,大部分厂商选择英伟达、高通、地平线的方案。而作为自研芯片的特斯拉,也即将发布全新一代HW4.0硬件版本,包括7nm 第二代FSD芯片(英伟达Orin也是7nm),全新500万像素摄像头以及高分辨率成像雷达。
目前,7nm芯片已经确定在三星代工,尽管后者也拥有5nm的工艺,但为了提高产量(良率)和稳定性,特斯拉最终还是选择了更加成熟的7nm工艺。
此外,三星已经开始批量生产新的DDR4内存、GDDR6图形内存、UFS存储芯片和新的SSD硬盘(256G,数据读取速度快7倍),所有这些都是为了在未来几年提高汽车芯片性能而专门设计。
此外,本周,有消息称,三星已经与特斯拉签订一份价值约为4万亿至5万亿韩元(约合32亿至40亿美元)的合同,为后者智能驾驶驾驶传感器关键套件—500万像素摄像头,而目前的摄像头仅为120万像素。现在,还不清楚特斯拉现有的摄像头供应商LG、致伸是否也有拿到部分定点。
此前,有消息称,根据最新协议,LG Innotek将提供20%的摄像头,而三星将提供剩余的80%的大部分。这些摄像头将用于特斯拉的每一款车型,即model S、model 3、model X、model Y以及即将推出的Cybertruck。同时,由于摄像头性能的提升,以及宽视角特性,前向摄像头可能从现在的3个减少到2个。
而在其他传感器方面,特斯拉在本月向美国联邦通信委员会提交了全新高分辨率雷达的注册文件,有知情人士称,这款全新的毫米波雷达可能是HW4.0硬件版本的关键组成部分。

而在此之前,特斯拉因为上一代传统雷达的低分辨率造成融合感知性能下降而选择「弃用」,并强调纯摄像头视觉感知和神经网络处理能力可以胜任智能驾驶。
目前,还不清楚特斯拉是否要将高分辨率雷达用于量产,或者可能会在部分法规较为严格的市场进行配置,从而保证可以通过当地的新车评级(比如,欧洲的主动安全法规测试场景更多,纯摄像头不一定可以胜任),并取得更高的分数。
显然,摄像头和芯片的性能提升已经是行业趋势。但此前,特斯拉「弃用」毫米波雷达一度让行业认为,纯视觉感知会是高阶智能驾驶的出路之一?但,现在答案是否定的。
而从去年开始,无论是NXP、TI等雷达芯片方案商,还是大陆集团、采埃孚、博世等雷达系统供应商都在加快推动4D成像毫米波雷达量产落地,由于分辨率性能的大幅提升,点云输出(与视觉或激光雷达更好的融合,以及可能的分类识别能力)以及全天候性能,已经成为高阶方案的选择项之一。
高工智能汽车研究院对特斯拉岗位招聘跟踪监测显示,特斯拉一直在招募嵌入式DSP软件开发工程师,目的是基于C/C++实现高度先进的信号处理算法,为各种传感系统提供高质量、高可靠、经过严格测试和可维护的生产级嵌入式应用软件。
其中,岗位职责还包括为下一代传感器系统评估各种现有的和新的传感器技术,同时负责设计、开发和分析各种传感系统的软件架构。而具备雷达DSP开发、复杂射频和高速数据/信号处理经验是优先考虑因素。
那么,特斯拉为什么要「弃用」传统雷达?
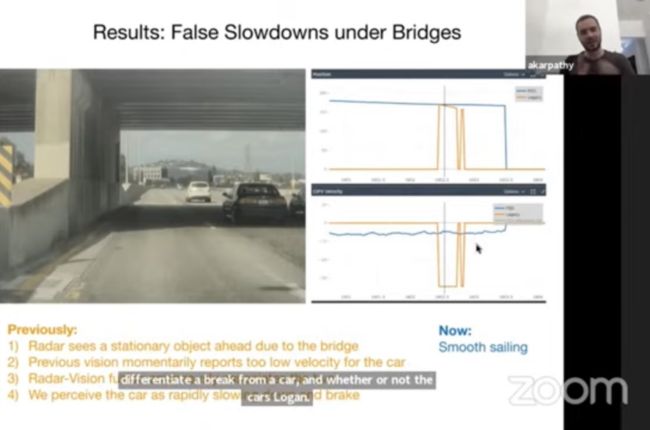
此前,特斯拉人工智能总监曾这样表示,对于低分辨率雷达来说,通过类似立交桥这样的场景时,融合感知很棘手。因为雷达的仰角分辨率很低,这意味着很难分辨出立交桥和下面停着的车辆,一旦无法正确区分立交桥和车辆,就可能会导致碰撞。
相比较而言,特斯拉可以通过数据训练来对摄像头的感知能力进行软件定义,并允许在整个生命周期中使用OTA更新迭代改进性能。因为摄像头会产生大量的数据,而软件的改进仍然可以使这些数据得到最大限度的利用。
而传统雷达的技术更新,尤其是硬件(信道数量)限制了感知能力的提升。直到高分辨率4D成像雷达的出现,通过快速增加虚拟信道技术,大幅度提升了返回数据的分辨率。这也是为什么特斯拉开始重新评估毫米波雷达的作用。
更重要的是,特斯拉一直受困于「幽灵刹车」问题。
就在今年2月,美国国家公路交通安全管理局(NHTSA)宣布,将对41.6万辆特斯拉汽车展开正式调查,原因是该机构接到大量车主投诉称,自动辅助驾驶系统Autopilot出现了刹车意外激活的情况(也就是突然无征兆地刹车)。
办法之一,实际上就是要彻底解决假阳性问题。比如,视觉感知目前仍然需要依靠大量的数据反哺来进行不断的训练,但长尾问题始终是存在的。这恰恰是高分辨率成像雷达的优势之一。
而幽灵刹车,不仅仅是造成消费者对辅助驾驶系统的体验不佳的印象,更关键的是会造成很多意外事故发生。此外,这种问题主要是由于传感器的感知缺陷造成的,而在夜间或大雾或大雨等恶劣天气条件下,摄像头的性能会很差。
同时,反应时间也比毫米波雷达雷达长,往往需要几帧来识别物体的相对速度变化,甚至缺乏良好的深度感知。实际上,特斯拉曾多次尝试在传统雷达基础上进行改进,来实现分辨率的提升。

之前特斯拉把「幽灵刹车」问题归结为毫米波雷达性能差,但令人尴尬的事,取消雷达「改用纯视觉感知方案」并没有根本性解决问题,车主的投诉反而指数级增长。
就在本周,美国国家公路交通安全管理局(NHTSA)公布第一轮辅助驾驶、自动驾驶报告数据,主要来自去年6月开始各家汽车制造商和运营商向NHTSA报告的一系列事故数据。


其中,以L2级辅助驾驶为例,特斯拉、本田和斯巴鲁是三家提交事故报告最多的品牌,合计为373例,占全部392起事故报告的95.6%。所有事故中,碰撞发生最多的部位是车辆的前部(包括正前方以及侧前方),占比达到76.5%。
从这些数据可以看出,前向碰撞是主要的事故形态,也是特斯拉发生的一系列事故的大部分场景。与此同时,NHTSA正在调查一系列特斯拉的安全事故,其中可能涉及到幽灵刹车问题。
在高工智能汽车研究院看来,在不准备配置激光雷达的条件下,4D成像雷达提供了四维(距离、多普勒、方位角、仰角)的直接和独立探测能力,通过基于密集点云的前融合,可以大幅提升智能驾驶系统的安全性和舒适性。
以NXP与为升科(CubTEK)联手发布最新一代4D成像雷达方案为例,提供图像级感知能力和小于0.1度的角度分辨率,实现增强4D感知功能,满足L3级以上自动驾驶的感知需求。

在关键参数方面,由于精密天线与NXP处理器上的硬件加速功能进行了高度协同工作,该款4D成像雷达可以同时进行短程和远程的测距,能够同时分辨前方200-300米处并行行驶的两车。
二是速度方面,这款4D成像雷达能够确定车辆和物体各自的速度,这些信息在自动紧急制动、自适应巡航控制等与路线规划有关的安全驾驶决策当中极为重要。
三是方位角,即被检物体距离雷达中心线的右侧或左侧的距离,如果有多个物体距离很近,为升科CubTEK与NXP联手打造的这款4D成像雷达可以提供小于1°的方位角分辨率,能够将这些物体彼此区分开。
四是仰角的测量,这款4D成像雷达能够计算出物体相对于路面的高度,然后确定车辆能否安全地通过被检测的物体,如不能通过则需要避开这些物体,主要应用在探测道路上方的立交桥或其他桥梁。
按照NXP的测算,从L2+到要求最高的L5,每辆车可能需要超过10个成像雷达传感器。以L2+为例,4-6个成像雷达,可以实现360度环绕感知,从而替代传统角雷达无法满足AVP的需求。
同样,视觉起家的Mobileye也认为,这种架构上的范式转变使传统雷达性能实现了真正的飞跃——增加检测准确率,同时减少回声的杂波。同时,能实现较弱反射目标的更远探测(300米),以及不必要的静态杂波滤除,解决静止物体识别问题。
此外,雷达架构尤其是芯片能力的提升,也推动毫米波雷达进入软件定义时代,意味着同样的硬件方案,具有更大的灵活性。复杂的专有算法,类似摄像头的计算机视觉技术,可以有效处理雷达探测到的物体。
比如,NXP的S32R45,配置四颗Arm Cortex-A53@800MHz,提供超过300 GFLOPS的算力,满足192个虚拟通道的数据处理。而Mobileye则提出,在2304个虚拟通道(12倍数量)下,提升处理能力的效率,并控制在11 TOPS内。
在安波福公司看来,在传感器方面,以毫米波雷达为中心的解决方案提供了一种可选的路径,尤其是4D成像雷达的加入,意味着,接下来机器学习技术也可以使用来自雷达的数据,并与其他数据进行融合。
对于L2+/L3功能,如高速公路自动驾驶和车道改变辅助,用于前向的4D成像雷达可以提供更高的角分辨率数据以及高程感知能力,同时提升角雷达的近距离精准探测能力,提升高阶自动泊车的感知识别。
在实际的道路场景应用上,此前安波福公司也给出了结合机器学习能力的一系列数据。比如,针对道路上的小物体或碎片,机器学习可以将探测距离再提高50%以上,并能跟踪200米范围内的小物体。
同时,对于前方小物体是否可以安全行驶通过,机器学习系统也可以用安全的和不安全的物体进行训练。此外,与经典的雷达信号处理相比,机器学习减少了70%的漏检,通过与其他传感的融合可以进一步改善检测。
事实上,从目前披露的特斯拉HW4.0的一些硬件调整来看,逻辑非常清晰:第一、仍然要保证在提升硬件性能的同时,尽量采用相对成熟的工艺。第二、软件和硬件之间需要平衡,不能完全依靠单一要素;第三、仍然要继续解决感知难题,这是系统安全的基础。