【霍罗维兹数据结构】GRAPH 图 | 基本图运算 DFS&BFS | 最小代价生成树

目录
Ⅰ. 图的抽象数据类型 - THE GRAPH ABSTRACT DATA TYPE
0x00 引入:七桥问题
0x01 图的定义
0x02 图的ADT
Ⅱ. 图的表示
0x00 邻接矩阵 - Adjacency Matrix
0x01 邻接表 - Adjacency Lists
Ⅲ. 基本图运算 - ELEMENTARY GRAPH OPERATIONS
0x00 引入
0x01 Depth First Search
0x02 Breadth First Search
0x03 连通分量 - Connected Components
0x04 生成树 - Spanning Trees
0x05 重连通分量 - Biconnected Components and Articulation Points
Ⅳ. 最小代價生成樹 - MINIMUM COST SPANNING TREES
0x00 引入
0x01 克鲁斯卡尔算法 - Kruskal's Algorithm
0x02 普利姆算法 - Prim's algorithm
0x03 索林算法 - Sollin's Algorithm
0x04 最短路径和迁移闭包 - Shortest Paths and Transitive Closure
0x05 单源点至所有其他节点:边权值非负 - Single Source All Destinations: Nonnegative Edge Costs
0x06 实现 Dijkstra 算法 - Implementing Dijkstra’s algorithm
0x07 所有节点两两之间的最短路径 - Single Source All Destinations: General Weights
Ⅰ. 图的抽象数据类型 - THE GRAPH ABSTRACT DATA TYPE
0x00 引入:七桥问题

概念:最早可追溯到1736年,欧拉用图论解决了经典的七桥问题。
欧拉证明,如果要从图中的一个节点除法,经图中所有边一次且仅一次,最后回到出发的节点,那么当且仅当图中所有节点的度都是偶数。为了纪念欧拉的发现,我们称之为欧拉回路。

图是使用最广泛的数学结构,可应用于电路分析、寻找最短路径、项目规划、化合物鉴定、网络流程设计、基因/蛋白质相互作用等……
0x01 图的定义
一个图由两个集合构成:
![]() :有限的、非空的顶点集合,
:有限的、非空的顶点集合, ![]() :有限的、可能是空的边缘集合。
:有限的、可能是空的边缘集合。
我们可以将其写作  .
.
An undirected graph:each edge is represented as an unordered pair of vertices.
无向图的节点二元组是无序二元组 eg. ![]() 和
和 ![]() 表示同一条边。
表示同一条边。
A directed graph -- each edge is represented as a directed pair of vertices.
有向图的边是有序的节点二元组,用 ![]() 表示,
表示, 是边尾,
是边尾, 是边头。 eg.
是边头。 eg. ![]() 与
与 ![]() 是两条不同的边。
是两条不同的边。

这些图的集合表示为:
![]()
![]()
![]()
![]()
![]()
![]()
注意,有向图在边头标出箭头。![]() 是树,我们可以将树定义为图的一种特例 (
是树,我们可以将树定义为图的一种特例 (![]() 不是树)
不是树)
① No self loops:
图中不允许存在由节点 发出而只想自己的边,即不允许存在 ![]() 的情况。
的情况。
也就是说 ![]() 不是图的合法边,这样的边我们称之为 环边 。
不是图的合法边,这样的边我们称之为 环边 。
② No multiple edges:
图中一般不重复出现同一条边,如果允许重复出现,那么这样的图称为 重复边图(multigraph)
Complete graph:
对于无向图,一个有  个顶点的完整图有
个顶点的完整图有 ![]() 条不同的边。
条不同的边。
对于有向图,一个有 个顶点的完整图有 ![]() 条不同的边。
条不同的边。

一个有向图是强连通的(strongly connected),如果 ![]() 中的每一对不同的顶点,都有一条从
中的每一对不同的顶点,都有一条从  到
到 ![]() 和
和 ![]() 到 的有向路径。
到 的有向路径。
A strongly connected component is a maximal subgraph which is strongly connected.
强连通分量是有向图中的最大强连通子图。
一个顶点的度是与该顶点相关的边的数量。
对于一个有向图,我们将一个顶点 的内度(in-degree)定义为以 为首的边的数量,而一个顶点 的外度(out-degree)定义为以 为尾的边的数量。
如果  是一个有 个顶点和
是一个有 个顶点和  条边的图
条边的图  中顶点
中顶点  的度数,那么边的数量为:
的度数,那么边的数量为:

0x02 图的ADT

Ⅱ. 图的表示
0x00 邻接矩阵 - Adjacency Matrix
令 为一个具有 个顶点的图,![]()
的邻接矩阵为一个  的二维数组,比如 adj_mat,定义为:
的二维数组,比如 adj_mat,定义为:
adj_mat[i][j] = 1 if the edge ( , ) is in E(G)
0 if there is no such edge.这样的定义也可以用于有向图,只是 ![]() 是有向的。
是有向的。
无向图的邻接矩阵是对称的,因为边 ![]() 在 中,则边
在 中,则边 ![]() 也在 中。
也在 中。
对于无定向图,我们可以通过只存储矩阵的上三角或下三角来节省空间。

有些问题或任务要求我们(可能)检查图的所有边,例如G中有多少条边?或者G 是否连通?
使用邻接矩阵,所有回答这些问题的算法都需要至少  的时间。
的时间。
因为我们必须检查矩阵的 ![]() 个条目来确定图的边。
个条目来确定图的边。
对于稀疏图,其邻接矩阵变得稀疏。
我们可能期望上述问题可以在更短的时间内得到解答,比如 ![]() 时间。
时间。
0x01 邻接表 - Adjacency Lists
在这个表示中,我们将邻接矩阵的 n 行替换为 n 个链表,每个链表对应 G 中的每个顶点。

The C declaration for the adjacency list representation:
#define MAX_VERTICES 50 /*maximum number of vertices*/
typedef struct node* node_pointer;
typedef struct node {
int vertex;
node_pointer link;
};
node_pointer graph[MAX_VERTICES];
int n = 0; /* vertices currently in use */对于具有 n 个顶点和 e 个边的无向图,这种表示需要 n 个头节点和 2e 个列表节点。每个列表节点有两个字段。
确定任意顶点的度数,![]() ,等价于入射在顶点上的边数。
,等价于入射在顶点上的边数。
我们可以在 ![]() 的时间
的时间 ![]() ,确定 G 中的总边数。
,确定 G 中的总边数。
对于有向图,我们可以很容易地确定出度,但找到入度更复杂。
(Weighted Edges Need to modify our representations)
Ⅲ. 基本图运算 - ELEMENTARY GRAPH OPERATIONS
0x00 引入
给定一个无向图 G = (V, E) 和 V(G) 中的一个顶点 v,
我们希望访问 G 中从 v 可达的所有顶点,即所有连接到 v 的顶点。
Depth First Search (DFS)
Breadth First Search (BFS)
0x01 Depth First Search
我们首先访问起始顶点 v。接下来,我们从 v 的邻接列表中选择一个未访问的顶点 w,
并对 w 进行深度优先搜索。我们通过将 v 的邻接列表放置在栈上来保留当前位置。
最终,我们的搜索到达一个顶点 u,它的邻接列表中没有未访问的顶点。
此时,我们从堆栈中删除一个顶点并继续处理它的邻接表。
以前访问过的顶点被丢弃;访问未访问的顶点并将其放置在堆栈上。当栈为空时搜索结束。
需要的申明:
#define FALSE 0
#define TRUE 1
short int visited[MAX_VERTICES];[Program 6.1] : Depth first search
void dfs(int v)
{
/* depth first search of a graph beginning with vertex v. */
node_pointer w;
visited[v] = TRUE;
printf("%5d", v);
for (w = graph[v]; w; w = w->link)
if (!visited[w->vertex])
dfs(w->vertex);
}
分析:如果我们使用邻接表,由于 dfs 对邻接表中的每个节点最多检查一次,所以完成搜索的时间是 ![]() 。如果我们使用邻接矩阵,那么确定与 v 相邻的所有顶点需要
。如果我们使用邻接矩阵,那么确定与 v 相邻的所有顶点需要  时间。由于我们最多访问 n 个顶点,因此总时间为 。
时间。由于我们最多访问 n 个顶点,因此总时间为 。
0x02 Breadth First Search
从顶点开始并将其标记为已访问。然后它访问 v 的邻接表上的每个顶点。
当我们访问了 v 的邻接表上的所有顶点后,访问与 v 的邻接表上的第一个顶点相邻的所有未访问的顶点。为了实现这个方案,当我们访问每个顶点时,我们将顶点放入队列中。
当我们用完一个邻接列表时,我们从队列中删除一个顶点并继续检查其邻接列表上的每个顶点。未访问的顶点被访问,然后放入队列;访问的顶点被忽略。当队列为空时搜索结束。
为了实现广度优先搜索,我们使用动态链接队列。
需要的申明:
typedef struct queue* queue_pointer;
typedef struct queue {
int vertex;
queue_pointer link;
};
void addq(queue_pointer*, queue_pointer*, int);
int deleteq(queue_pointer*);[program 6.2] : Breadth first search
void bfs(int v)
{
/* breadth first traversal of a graph, staring with node v.
the global array visited is initialized to 0, the queue
operations are similar to those described in Chapter 4. */
node_pointer w;
queue_pointer front, rear;
front = rear = NULL; /* initialize queue */
printf("%5d", v);
visited[v] = TRUE;
addq(&front, &rear, v);
while (front) {
v = deleteq(&front);
for (w = graph[v]; w; w = w->link)
if (!visited[w->vertex]) {
printf("%5d", w->vertex);
addq(&front, &rear, w->vertex);
visited[w->vertex] = TRUE;
}
}
}分析:由于每个顶点在队列中只放置一次,所以 while 循环最多迭代 n 次。对于邻接表表示,这个循环的总成本为 ![]() ,其中
,其中 ![]() 。对于邻接矩阵表示,while 循环需要 次访问每个顶点。因此,总时间为 。
。对于邻接矩阵表示,while 循环需要 次访问每个顶点。因此,总时间为 。
0x03 连通分量 - Connected Components
注意,在深度优先搜索和广度优先搜索中,所有访问过的顶点,
连同所有与它们相关的边,形成 G 的连通分量。此属性允许我们确定有向图是否连通。
只需调用 dfs(0) 或 bfs(0) ,然后确定是否有任何未访问的顶点。
如果使用邻接表,这需要 O(n+e) 时间。一个密切相关的问题是列出连接的组件。
[Program 6.3] : Connected components
void connected(void)
{
/* determine the connected components
of a graph */
int i;
for (i = 0; i < n; i++)
if (!visited[i]) {
dfs(i);
printf("\n");
}
}分析:如果G用它的邻接表来表示,那么dfs所用的总时间是 ![]() 。由于 for 循环需要 时间,因此生成所有连接组件所需的总时间是
。由于 for 循环需要 时间,因此生成所有连接组件所需的总时间是 ![]() 。如果 G 由其邻接矩阵表示,则确定连通分量所需的时间为 。
。如果 G 由其邻接矩阵表示,则确定连通分量所需的时间为 。
0x04 生成树 - Spanning Trees
当 G 连接时,从任何顶点开始的深度优先搜索或广度优先搜索访问 G 中的所有顶点。
搜索隐式地将 G 中的边分成两组:
T(对于树边)是在搜索期间使用或遍历的边的集合,
N(对于非树边)是剩余边的集合。
T 中的边形成一棵包含 G 的所有顶点的树。
生成树是仅由 G 中的边组成并包含 G 中的所有顶点的任何树。
我们可以使用 dfs 或 bfs 来创建生成树;深度优先生成树广度优先生成树。

如果我们将一条非树边 (v,w) 添加到任何生成树 T 中,
它会创建一个由边 (v,w) 和 T 中从 w 到 v 的路径上的所有边组成的循环。
生成树的另一个性质:生成树是 G 的最小子图 G',使得 V(G')= V(G) 且 G' 是连通的。
任何具有 n 个顶点的连通图必须至少有 n-1 条边,并且所有具有 n-1 条边的连通图都是树。
因此,生成树有 n-1 条边。构造最小子图在通信网络的设计中经常得到应用。
0x05 重连通分量 - Biconnected Components and Articulation Points
对于无向连通图 G,关节点是 G 的一个顶点 v,这样删除 v 以及所有入射到 v 上的边,
生成一个图 G,该图 G 至少具有两个连通分量。双连通图是没有连接点的连通图。

在许多图形应用程序中,关节点是不可取的。连通无向图的双连通分量是 G 的最大双连通子图 H。很容易验证同一个图的两个双连通分量的公共顶点不超过一个。这意味着没有边可以位于图的两个或多个双连通分量中。因此,G 的双连通分量划分了 G 的边。
通过使用 G 的深度优先生成树来查找连通无向图 G 的双连通分量:
我们按照在深度优先搜索期间访问顶点的顺序对顶点进行编号。我们将此数字称为顶点的深度优先数或 dfn。如果 u 和 v 是两个顶点,并且 u 是深度优先生成树中 v 的祖先,则 dfn(u) < dfn(v)。非树边 (u,v) 是后边当且仅当 u 是 v 的祖先或 v 是 u 的祖先。
根据深度优先搜索的定义,所有非树边都是后边。这意味着深度优先生成树的根是一个关节点,如果它至少有两个孩子。此外,任何其他顶点 u 是一个连接点,当且仅当它具有至少一个子 w 使得我们无法使用仅由 w、w 的后代和单个后边组成的路径到达 u 的祖先。这些观察导致我们为 G 的每个顶点定义一个值 low ,使得 low(u) 是我们可以从 u 到达的最低 dfn ,使用后代路径后跟最多一个后边缘:
low(u) = min{ dfn(u), min{low(w) | w is a child of u},
min{dfn(w) | (u,w) is a back edge} }因此,我们可以说 u 是一个关节点,当且仅当 u 是生成树的根并且有两个或多个孩子,或者 u 不是根并且有一个孩子 w 使得 ![]()

我们可以轻松地修改 dfs 以计算连接无向图的每个顶点的 dfn 和 low。见程序 6.4。它的初始调用是 dfnlow(x,-1),其中 x 是深度优先搜索的起始顶点。在该程序中,我们使用宏 MIN2 和全局变量 dfn、low 和 num。函数 init(程序 6.5)包含正确初始化 dfn、low 和 num 的代码。
需要的申明:
#define MIN2(x,y) ((x) < (y) ? (x) : (y))
short int dfn[MAX_VERTICES];
short int low[MAX_VERTICES];
int num;[Program 6.5] Initialization of dfn and low
void dfnlow(int u, int v)
{
/* compute dfn and low while performing a dfs search
beginning at vertex u, v is the parent of u (if any) */
node_pointer ptr;
int w;
dfn[u] = low[u] = num++;
for (ptr = graph[u]; ptr; ptr = ptr->link) {
w = ptr->vertex;
if (dfn[w] < 0) { /* w is an unvisited vertex */
dfnlow(w, u);
low[u] = MIN2(low[u], low[w]);
}
else if (w != v)
low[u] = MIN2(low[u], dfn[w]);
}
}如果低[w] dfn[u],那么我们已经确定了一个新的双连通分量。如果我们在第一次遇到边时使用堆栈来保存边,我们可以输出双连接组件中的所有边。见程序 6.6。它的初始调用是 bicon(x, -1),其中 x 是生成树的根。使用相同的初始化函数(程序 6.5)。
[Program 6.6] Biconnected components of a graph
void bicon(int u, int v)
{
node_pointer ptr;
int w, x, y;
dfn[u] = low[u] = num++;
for (ptr = graph[u]; ptr; ptr = ptr->link) {
w = ptr->vertex;
if (v != w && dfn[w] < dfn[u])
add(&top, u, w); /* add edge to stack */
if (dfn[w] < 0) { /* w is an unvisited vertex */
bicon(w, u);
low[u] = MIN2(low[u], low[w]);
if (low[w] >= dfn[u]) {
printf("New biconnected component: ");
do { /* delete edge from stack */
delete(&top, &x, &y);
printf(“ <% d, % d>”, x, y);
} while (!((x == u) && (y == w)));
printf("\n");
}
}
else if (w != v) low[u] = MIN2(low[u], dfn[w]);
}
}分析:函数bicon假设连通图至少有两个顶点。 bicon 的时间复杂度是 ![]() 。
。
Ⅳ. 最小代價生成樹 - MINIMUM COST SPANNING TREES
0x00 引入
加权无向图的生成树的成本是生成树中边的成本(权重)的总和。
最小成本生成树是成本最低的生成树。
三种贪心算法:![]() 算法、
算法、![]() 算法、
算法、![]() 算法。
算法。
在贪心中,我们分阶段构造最优解。
在每个阶段,我们都会做出一个目前最好的决定(使用一些标准)。
由于我们以后无法更改此决定,因此我们确保该决定将导致可行的解决方案。
通常,每个阶段的项目选择基于最低成本或最高利润标准。
可行的解决方案是在问题指定的约束范围内工作的解决方案。
对于生成树,我们使用最低成本标准。我们的解决方案必须满足以下约束:
(1)只选图中出现的边
(2)只选  条边
条边
(3)不选构成环路的边
0x01 克鲁斯卡尔算法 - Kruskal's Algorithm
![]() 的算法通过一次向 T 中添加一条边来构建最小成本生成树 T。
的算法通过一次向 T 中添加一条边来构建最小成本生成树 T。
该算法以成本的非递减顺序选择包含在 T 中的边。如果一条边没有与 T 中的边形成一个循环,
则将一条边添加到 T。如果 G 是连通的并且顶点 n > 0,则恰好 n-1 条边将被选择包含在 T 中。


[Program 6.7] Kruskal's algorithm
T = {};
while (T contains less than n - 1 edges && E is not empty) {
choose a least cost edge(v, w) from E;
delete (v, w) from E;
if ((v, w) does not create a cycle in T)
add(v, w) to T;
else
discard(v, w);
}
if (T contains fewer than n - 1 edges)
printf("No spanning tree\n");实施:如何以最低成本确定一条边并删除该边?排序或使用最小堆。如何检查新边 (v,w) 是否在 T 中不形成循环?我们可以使用 5.10 节中的 union-find 操作。
Kruskal 算法的计算时间为 ![]() 。
。
【定理】令G是无向连接图, ![]() 算法给出G的最小代价生成树。
算法给出G的最小代价生成树。
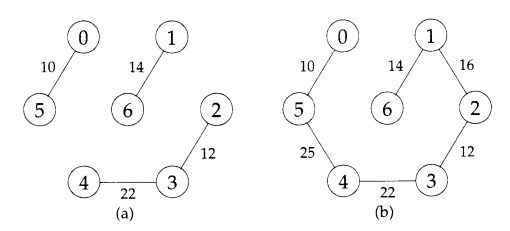
0x02 普利姆算法 - Prim's algorithm
Prim 的算法 Prim 的算法与 Kruskal 的算法一样,一次构造一条边的最小成本生成树。
然而,在每个阶段,一组选定的边形成一棵树。 Prim 的算法从包含单个顶点的树 T 开始。
这可以是任何顶点。接下来,我们将最小成本边 (u,v) 添加到 T 使得 T U {(u,v)} 也是一棵树。
我们重复这个边添加步骤,直到 T 包含 n-1 条边。为了确保添加的边不形成循环,
在每一步我们选择边 (u,v),使得 T 中的 u 或 v 恰好其中一个。
[Program 6.8]: Prim's algorithm
T = {};
TV = { 0 }; /* start with vertex 0 and no edges */
while (T contains fewer than n - 1 edges) {
let(u, v) be a least cost edge such that
u ∈ TVand v TV;
if (there is no such edge)
break;
add v to TV;
add(u, v) to T;
}
if (T contains fewer than n - 1 edges)
printf("No spanning tree\n");
实现:对于不在 TV 中的每个顶点 v,我们保留一个伴生顶点 near(v),使得 near(v) ∈TV 和 cost(near(v), v) 在所有这些选项中为 near(v) 的最小值.计算时间为 ,其中 n 是 G 中的顶点数。
0x03 索林算法 - Sollin's Algorithm
Sollin 算法与 Kruskal 和 Prim 算法不同,Sollin 算法在每个阶段选择几条边包含在 T 中。
在阶段开始时,选定的边与所有 n 个图顶点一起形成一个生成森林。
在一个阶段,我们为森林中的每棵树选择一条边。该边是最小成本边,在树中只有一个顶点。
在第一阶段开始时,选定边的集合是空的。当阶段结束时只有一棵树或没有边可供选择时,该算法终止。
0x04 最短路径和迁移闭包 - Shortest Paths and Transitive Closure
假设我们有一个表示高速公路系统的图表。在该图中,顶点代表城市,边代表高速公路的路段。
每条边都有一个权重,表示由边连接的两个城市之间的距离。
问题(来自一位希望从 A 市开车到 B 市的驾车者):
(1) 是否有从 A 市到 B 市的路径?
(2) 如果从 A 到 B 有多条路径,哪条路径最短?
我们将路径的长度定义为该路径上边的权重之和。我们假设有向图。
0x05 单源点至所有其他节点:边权值非负 - Single Source All Destinations: Nonnegative Edge Costs
给定有向图 G=(V, E),权重函数 w(e),w(e) > 0,用于 G 的边,以及源顶点 v0。我们希望确定从 v0 到 G 的每个剩余顶点的最短路径。

我们可以使用贪心算法以长度的非递减顺序生成最短路径。
令 S 为已找到最短路径的顶点集,包括 v0 。对于不在 S 中的 w,令 distance[w] 为从 v0 开始,
仅通过 S 中的顶点,并以 w 结束的最短路径的长度。
观察:
(1) 如果下一条最短路径是到顶点 u,那么从 v0 到 u 的路径只经过 S 中的那些顶点。
(2) 选择顶点 u,使其具有最小距离,distance[u ],在所有不在 S 中的顶点中。
(3) 一旦我们选择了 u 并生成了从 v0 到 u 的最短路径,u 就成为了 S 的成员。
将 u 添加到 S 可以改变从 v0 开始的最短路径的距离,仅通过 S 中的顶点,并在当前不在 S 中的顶点 w 处结束。
0x06 实现 Dijkstra 算法 - Implementing Dijkstra’s algorithm
假设n个顶点从0到n-1编号。将集合 S 保持为一个数组,found,如果顶点 i 不在 S 中,
则 found[i] = FALSE,如果顶点 i 在 S 中,则 found[i] = TRUE。图由其成本邻接矩阵表示,
其中 cost[i ][j] 是边
这个数字的选择是任意的,但是我们做了两个规定:
(1)这个数字必须大于成本矩阵中的任何一个值。
(2) 必须选择数字以便距离[u] + cost[u][w] 不会产生溢出到符号位。
Program 6.9 : Declarations for the shortest path algorithm
#define MAX_VERTICES 6 /* maximum number of vertices*/
int cost[][MAX_VERTICES] =
{ { 0, 50, 10, 1000, 45, 1000},
{ 1000, 0, 15, 1000, 10, 1000},
{ 20, 1000, 0, 15, 1000, 1000},
{ 1000, 20, 1000, 0, 35, 1000},
{ 1000, 1000, 30, 1000, 0, 1000},
{ 1000, 1000, 1000, 3, 1000, 0} };
int distance[MAX_VERTICES];
short int found[MAX_VERTICES];
int n = MAX_VERTICES;Program 6.10 : Single source shortest paths
void shortestpath (
int v,
int cost[][MAX_VERTICES],
int distance[],
int n, short int found[]
)
{
/* distance[i] represents the shortest path from vertex v to i,
found[i] holds a 0 if the shortest path from vertex i has not
been found and a 1 if it has. cost is the adjacency matrix */
int i, u, w;
for (i = 0; i < n; i++) {
found[i] = FALSE;
distance[i] = cost[v][i];
}
found[v] = TRUE;
distance[v] = 0;
for (i = 0; i < n - 2; i++) {
u = choose(distance, n, found);
found[u] = TRUE;
for (w = 0; w < n; w++)
if (!found[w])
if (distance[u] + cost[u][w] < distance[w])
distance[w] = distance[u] + cost[u][w];
}
}
int choose(int distance[], int n, short int found[])
{
/* find the smallest distance not yet checked */
int i, min, minpos;
min = INT_MAX;
minpos = -1;
for (i = 0; i < n; i++)
if (distance[i] < min && !found[i]) {
min = distance[i];
minpos = i;
}
return minpos;
}分析:

0x07 所有节点两两之间的最短路径 - Single Source All Destinations: General Weights
Dijkstra 算法不适用于具有负权重的图(例如图 6.29)
Bellman-Ford 算法解决了这个问题(没有负长度的循环)

观察: 1. 如果从 v 到 u 的最短路径最多 k,k>1,则边不超过 k-1 条边,
那么 2. 如果从 v 到 u 的最短路径最多 k,k>1 ,边正好有 k 条边,
那么它由一条从 v 到某个顶点 j 的最短路径,然后是边
从 v 到 j 的路径有 k-1 条边,长度为 。所有顶点 i 使得边
由于我们对最短路径感兴趣,因此最小化的 i 是 j 的正确值。

Bellman-Ford Algorithm
void BellmanFord(int n, int v)
{ // single source all destination shortest paths with
// negative edge lengths
for (int i = 0; i < n; i++)
dist[i] = length[v][i]; // initialize dist
for (int k = 2; k <= n - 1; k++)
for (each u such that u != v and u has at least one
incoming edge)
for (each in the graph)
if (dist[u] > dist[i] + length[i][u])
dist[u] = dist[i] + length[i][u];
}
时间复杂度: 与邻接矩阵,
与邻接矩阵,![]() 与 list.
与 list.
所有对最短路径,我们希望找到所有顶点对之间的最短路径,![]()
我们可以使用以 V(G) 中的每个顶点为源的最短路径来解决这个问题。
所需的总时间为 。然而,我们可以获得一个概念上更简单的算法,即使 G 中的某些边具有负权重也能正常工作。 (我们确实要求 G 没有负长度的环。)
动态规划方法。虽然这个算法仍然有 的计算时间,但它有一个更小的常数因子
我们用它的成本邻接矩阵来表示图 G。令 ![]() 为从 i 到 j 的最短路径的成本,
为从 i 到 j 的最短路径的成本,
仅使用索引为 k 的那些中间顶点。 ![]() 是从 i 到 j 的最短路径的成本。
是从 i 到 j 的最短路径的成本。
![]() 。所有对算法的基本思想是从矩阵
。所有对算法的基本思想是从矩阵 ![]() 开始.
开始.
并依次生成矩阵 ![]() .
.
如果我们已经生成了 ![]() ,那么我们可以通过意识到对于任何一对顶点 i 、 j 都适用以下两条规则之一来生成 Ak。
,那么我们可以通过意识到对于任何一对顶点 i 、 j 都适用以下两条规则之一来生成 Ak。
(1) i 到 j 不经过索引大于 k 的顶点的最短路径不经过索引为 k 的顶点,因此它的成本是 ![]()
(2) 最短路径经过顶点 k 。这样的路径包括从 i 到 k 的路径,然后是从 k 到 j 的路径。
这些规则产生如下公式:
![]()
并且 ![]() .
.
Example 6.5: Look at A1 [0][2]

函数 allcosts 计算 ![]() 。使用数组 distance 就地完成计算。
。使用数组 distance 就地完成计算。
注意:![]() 和
和 ![]() .
.
Program 6.12 : All pairs, shortest paths function
void allcosts(int cost[][MAX_VERTICES],
int distance[][MAX_VERTICES], int n)
{ /* determine the distances from each vertex to every other vertex, cost is
the adjacency matrix, distance is the matrix of the distances. */
int i, j, k;
for (i = 0; i < n; i++)
for (j = 0; j < n; j++)
distance[i][j] = cost[i][j];
for (k = 0; k < n; k++)
for (i = 0; i < n; i++)
for (j = 0; j < n; j++)
if (distance[i][k] + distance[k][j] < distance[i][j])
distance[i][j] = distance[i][k] + distance[k][j];
}对于 allcosts 的分析:

参考资料
Fundamentals of Data Structures in C