基于STM32+OV7670的图像采集车牌识别(终极篇:车牌识别)
书接上文:https://blog.csdn.net/m0_59113542/article/details/123592010?spm=1001.2014.3001.5502
本篇文章主要介绍如何对采集到的图像处理,进行车牌号的识别。
本车牌识别系统包括以下:图像采集→二值化灰度处理→识别车牌区域→字符分割→字符识别。
一、效果展示:
有图有真相
图片比任何语言都有说服力,话不多说直接上图。
二、原理讲解:
图像采集已在上一篇文章讲过,有需要的可以取去看一下。
1、二值化:
二值二值,字面意思就是转变成两个数值,就是将整个图像的每个像素都转变成0(黑)或255(白)这两个值,非黑即白,这样处理起来就很方便了。那么问题又来了,0~255之间应该如何转换?是随便转的吗?
当然不是,简单的办法就是取一个合适的阈值,比如说127吧,小于127的转为0,大于127的转为1,因此找合适阈值就变得尤为重要,可以取其中值,也可以取各个像素的平均值。
2、识别车牌区域:
如何在一张图片中精准的定位车牌所在的位置,这个就很有意思了!!!
上边界和下边界:在上一步二值化处理时,已经将整张图片转换成0(黑色)或者255(白色),车牌是蓝底白字,二值化后蓝色的低会变成黑色,上面的字依旧是白色,一行一行的看, 这一行中灰度值会多次发生跳变,也就是会有很多从0变成255,我们恰恰利用这一点,也就是统计跳变点的个数,当跳变点个数超过一定的阈值时,就认为该行是边界。
空说太无力了,还是举个例子:

绿线代表一行,沿着这一行看,当到达白字时,其灰度数值会发生跳变从 0(黑色)跳变成255(白色),记为一个跳变点,这一行的跳变点还有很多,我们就根据跳变点的个数来判断上下边界。
左右边界:介于我们上下边界已经找好,所以我们可以在这两边界之间的区域找左右边界,从而缩小工作量,我们依旧可以按跳变点的算法来做,也可以用另一种方法,RGB转变成HSV,根据其色调、饱和度、明度来判断。

也就是这样。
3、字符分割
区域也定好,我们想要识别字母,首先得先提取出来啊,一一识别,因此就需要字符分割了。如何分割呢。
先上个图便于大家理解。
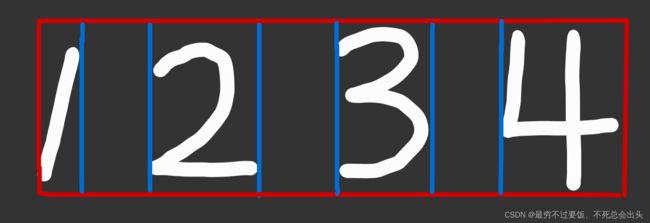
如图,红线代表着我们上方确定好的边界,我们可以看到两个字母之间二值化处理后全是黑色,唉~我们就可以根据这一特性看,竖着看如果某一列全为黑色也就是0,并且旁边也全都是黑色,就可以判断为空隙,这样就能截取到了各个字母,用蓝线表示字母的边界。
4、字符识别
经过前面的努力,我们已经提取到了各个字符,下面就进行识别呗。
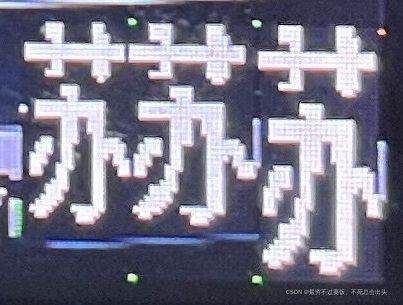
为了增加识别的准确度呢,我们将提取到的字符进行放大,先横向放大然后纵向放大,以提高准确度。下图:
怎么识别呢,我们通过取模软件,取到多个多个字模,比如说,粤、苏、辽、A~F、1~9,将其存放在数组中,然后让我们提取到的字符的数组去和他们一一比较。
比如说我们现在提取到“苏”,让它的数组去比较,肯定会找到一个标准数组和提取数组一样,但是呢,就像世界上没有两片相同的叶子一样,他们或多或少会有出处,因此我们设定当他们的相似度超过一定的阈值时,就认为二者相同。
最下方就是我们识别到的车牌号:
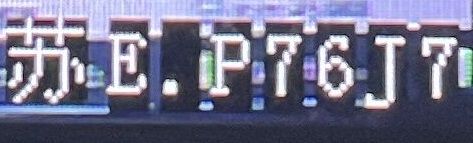
当然啦,用f103系列的单片机去做机器视觉,多少有点为难它了,毕竟它不是专门做这个的。所以有时会出现一些个别字符识别错误,尤其是“E”与“F”,这是正常现象。
三、程序实现:
algorithm.c:上面这些操作的各个算法
#include "algorithm.h"
#include "delay.h"
#include "lcd.h"
#include "ShowChar.h"
#include "string.h"
#include
void ChangePoint_Show_240(void) { //240方向跳变点显示
vu16 a = 0,b = 0;
for(a = 0; a < 240; a++) { //建立参考线10、20、30(左侧纵向三条绿色线)
LCD_DrawPoint(10,a,0x63<<5); //10
LCD_DrawPoint(20,a,0x63<<5); //20
LCD_DrawPoint(30,a,0x63<<5); //30
}
for(a = 0; a < 240; a++) { //显示对应的横向跳变点
LCD_DrawPoint(TableChangePoint_240[a],a,0xf800); //跳变点显示,红色标记
if(TableChangePoint_240[a] >= 12) { //跳变点个数(阈值)设定 阈值调节3-(1)
for(b = 35; b < 40; b++) { //该行跳变点个数超过阈值,在参考线30旁边画一条小绿线
LCD_DrawPoint(b,a,0x63<<5); //Green
}
}
}
}
void ChangePoint_Analysis_240(void) { //240跳变点分析 获取高度
vu16 a = 0,b = 0;
Min_ChangePoint_240 = 240;
Max_ChangePoint_240 = 0;
for(a = 0; a < 240; a++) //240扫描 ,获取上下限值 :Min_ChangePoint_240,Max_ChangePoint_240
{
while(TableChangePoint_240[a]<12) //找到上边界
{
a++;
}
Min_ChangePoint_240 = a; //上边界
while(TableChangePoint_240[a] >= 12) { //找到下边界
a++;
}
Max_ChangePoint_240 = a; //下边界
if(Max_ChangePoint_240 - Min_ChangePoint_240 >= 15) { //连续性阈值
a=240;
}
}
Min_ChangePoint_240 = Min_ChangePoint_240 - 3; //向上微调3像素
Max_ChangePoint_240 = Max_ChangePoint_240 + 2; //向下微调2像素
for(a = 30; a < 280; a++) { //显示上界限
LCD_DrawPoint(a, Max_ChangePoint_240, 0x001f); //画上边界蓝线
}
for(a = 30; a < 280; a++) { //显示下界限
LCD_DrawPoint(a, Min_ChangePoint_240, 0x001f); //画下边界蓝线
}
for(a = 30; a < 280; a++) { //显示50,参考50像素位置处,车牌位置不要超过这根线,免得不能字符的归一化处理
LCD_DrawPoint(a,Min_ChangePoint_240+50,0xf800); //画最下方红线
}
flag_MaxMinCompare = 1;
if(Min_ChangePoint_240 > Max_ChangePoint_240) { //判断合法性1:最小值>最大值
flag_MaxMinCompare = 0;
}
if(Min_ChangePoint_240 == 240 || Max_ChangePoint_240 == 0) { //判断合法性2:值没有重新赋值
flag_MaxMinCompare = 0;
}
if(Max_ChangePoint_240-Min_ChangePoint_240 < 15) { //判断合法性3: //阈值调节2-(2)
flag_MaxMinCompare = 0;
}
}
static void RGB_HSV(vu16 num) { //RGB565转HSV
float max = 0.00,min = 0.00;
vu8 r = 0,g = 0,b = 0;
r = (num>>11)*255/31;g=((num>>5)&0x3f)*255/63;b=(num&0x1f)*255/31;
max = r;
min = r;
if(g >= max)max = g;
if(b >= max)max = b;
if(g <= min)min = g;
if(b <= min)min = b;
V = 100 * max / 255; //转换为百分比
S = 100 * (max - min) / max; //扩大100倍显示
if(max == r)H =(g - b) / (max - min) * 60;
if(max == g)H = 120 + (b - r) / (max - min) * 60;
if(max == b)H = 240 + (r - g) / (max - min) * 60;
if(H<0) H=H+360;
}
void ChangePoint_Analysis_Blue(void) { //320蓝色区域分析,采用读取像素,得结果Min_blue,Max_blue
vu16 a = 0, b = 0, num_color = 0;
vu16 min_320 = 0, max_320 = 0; //各行的最小、最大值
Min_blue = 0;
Max_blue = 320;
min_320 = 320;
max_320 = 0;
for(a = Min_ChangePoint_240; a < Max_ChangePoint_240; a++) { //在上下边界扫描
for(b = 30; b < 290; b++) { //不用到320 for(b=30;b<320;b++)
num_color = LCD_ReadPoint(b, a); //读取像素,代码优化速度有待提升 ?扫描方法也可优化,以提升速度
RGB_HSV(num_color); //RGB565转HSV(左右边界是用HSV判断的 HSV:色调、饱和度、明度)
if(250 > H && H > 190 && 60 > S && S > 15 && 100 > V && V > 45) { // 和 蓝色HSV 阈值比较
if(b < min_320) { //获得横轴的Min和Max值,即蓝色车牌的左右边界
min_320 = b; //得到左边界
}
if(b > max_320) {
max_320 = b; //得到右边界
}
}
}
}
Min_blue = min_320; //获取各行的最大值//修正一点
Max_blue = max_320 - 5; //获取各行的最小值//修正一点
for(a = Min_ChangePoint_240; a < Max_ChangePoint_240; a++) { //显示左界限 蓝线
LCD_DrawPoint(Min_blue, a, 0xf8); //LCD_DrawPoint(Min_blue,a,0xf800);
}
for(a = Min_ChangePoint_240; a < Max_ChangePoint_240; a++) { //显示右界限 红线
LCD_DrawPoint(Max_blue, a, 0xf800);
}
}
void ChangePoint_Analysis_320(void) { //蓝色区域中,320跳变点分析,获得TableChangePoint_320[b]结果
//(先二值化,再判断白点个数,=0则是分割线)
vu16 a = 0, b = 0,num_color = 0;
vu8 R1 = 0, G1 = 0, B1 = 0;
vu8 Mid_ChangePoint_240 = 0;
vu8 max_R = 0, max_G = 0, max_B = 0, min_R = 0, min_G = 0, min_B = 0;
vu8 mid_R = 0, mid_G = 0, mid_B = 0;
max_R = 0;
max_G = 0;
max_B = 0;
min_R = 30;
min_G = 60;
min_B = 30;
Mid_ChangePoint_240 = (Min_ChangePoint_240 + Max_ChangePoint_240) / 2; //中间位置
for(b = Min_blue; b < Max_blue; b++) { //左右边界
num_color = LCD_ReadPoint(b, Mid_ChangePoint_240); //(取车牌中间那一行的颜色为参考量)读取像素,代码优化速度有待提升 ?扫描方法也可优化,以提升速度
R1 = num_color >> 11;
G1 = (num_color >> 5) & 0x3F;
B1 = num_color & 0x1F;
if((R1 > 10) && (G1 > 25) && (B1 > 15) && (R1 <= 30) && (G1 <= 60) && (B1 <= 30)) { //二值化,高阈值:25.55.25,较合适阈值(21,47,21)
if(max_R < R1) max_R = R1; //获得最大值和最小值
if(max_G < G1) max_G = G1;
if(max_B < B1) max_B = B1;
if(min_R > R1) min_R = R1;
if(min_G > G1) min_G = G1;
if(min_B > B1) min_B = B1;
}
}
mid_R = (max_R + min_R) / 2; //获得分割阈值
mid_G = (max_G + min_G) / 2;
mid_B = (max_B + min_B) / 2;
for(b = 0; b < 320; b++) { //各行跳变点计数,数组清零
TableChangePoint_320[b] = 0;
}
for(a = Min_ChangePoint_240;a < Max_ChangePoint_240; a++)
{
for(b = Min_blue + 1; b < Max_blue; b++)
{
num_color = LCD_ReadPoint(b, a); //读取像素,代码优化速度有待提升 ?扫描方法也可优化,以提升速度
R1 = num_color >> 11;
G1 = (num_color >> 5) & 0x3F;
B1 = num_color & 0x1F;
if((R1 >= mid_R) && (G1 >= mid_G) && (B1 >= mid_B)) //二值化,高阈值:25.55.25,较合适阈值(21,47,21)
{
LCD_DrawPoint(b, a, 0xffff); //白色
TableChangePoint_320[b]++; //白色,跳变点+1(该列跳变点个数==该列白色像素点个数)
} else
{
LCD_DrawPoint(b, a, 0x0000); //黑色
}
}
}
}
void ChangePoint_Show_320(void) //320方向跳变点显示
{
vu16 a = 0,b = 0;
for(a = 0;a < 320; a++) //显示对应的横向跳变点
{
if(TableChangePoint_320[a] == 0)
{
LCD_DrawPoint(a, 0, 0x001F); //跳变点显示,红色标记
} else {
LCD_DrawPoint(a, TableChangePoint_320[a], 0xf800); //跳变点显示,红色标记
}
}
}
//字符分割,返回分割的字符个数,用于判断合法性
vu8 SegmentationChar(void)
{
vu16 a = 0, b = 0;
vu8 i = 0; //统计分割的字符个数,不为9说明分割有误
for(b = Max_blue; b > Min_blue; b--) // 左右界线的扫描
{
if(TableChangePoint_320[b] == 0) //间隙分割 根据HSV比较 跳变点为0 代表空隙
{
for(a = Min_ChangePoint_240; a < Max_ChangePoint_240 ; a++) //画线--调试用 车牌高度一样的线
{
LCD_DrawPoint(b,a+1,0x001f); //仔细观察b的数值,在这里只画空隙的右边界线
}
i++; //右边界线个数
b--; //下一列有跳变点才是分割界
while(TableChangePoint_320[b] == 0) //画过线后,找到跳变点不为0的地方
{
b--;
if(b <= Min_blue) break;
}
}
}
i--; //字符个数=右边界线个数-1
LCD_ShowNum(30,220,i,2); //显示分割的字符个数+1,8是正常值
return i;
}
static void Normalized(vu16 character_boundary_right, vu16 character_boundary_left) //归一化 24*50
{
vu16 a = 0,b = 0,e = 0;
vu16 num = 0; //保存读取像素
vu8 Mo = 0, Yu = 0; //取整和取模
vu8 num1 = 0, num2 = 0, num3 = 0;
vu8 Mo_1 = 0; //
vu8 Min_240 = 0, Max_240 = 0; //框紧字符后的上下限
if((character_boundary_right - character_boundary_left) < 25) {
//框紧字符
Min_240 = Min_ChangePoint_240 + 1; //车牌高度下限(上边界)
Max_240 = Max_ChangePoint_240 - 1; //车牌高度上限(下边界)
//将字符框紧
while(Min_240++) //框紧后,得到: Min_240
{
for(b = character_boundary_left + 1; b < character_boundary_right; b++)
{ //character_boundary_left → character_boundary_right
num = LCD_ReadPoint(b, Min_240);
if(num)
{
break;
}
}
if(num)
{
break;
}
}
while(Max_240--) //框紧后,得到: Max_240
{
for(b = character_boundary_left + 1; b < character_boundary_right; b++)
{ //character_boundary_left → character_boundary_right
num = LCD_ReadPoint(b,Max_240);
if(num)
{
break;
}
}
if(num)
{
break;
}
}
Min_240 -= 1;
Max_240 += 2;
LCD_DrawPoint(character_boundary_left, Min_240, 0xffff); //白色
LCD_DrawPoint(character_boundary_right, Max_240, 0xffff);
//显示复制的图片
num3 = 0;
for(a = Min_240 + 1; a < Max_240; a++) //高度
{
num2=0;
for(b = character_boundary_left + 1; b < character_boundary_right; b++)
{ //character_boundary_left → character_boundary_right 宽度 +1
num = LCD_ReadPoint(b, a);
LCD_DrawPoint(271 - (character_boundary_right- character_boundary_left - 1) + num2, 191 + num3, num); //复制像素值 显示
num2++; //当前像素所在列相对于做边界的列差
}
num3++; //当前像素所在行相对于上边界的行差
}
num3 = 0;
//图片放大算法:最近邻插值 先将宽度放大,后将长度放大 宽24*高50
//将原有图宽度的像素点数与目标24像素点进行相减
Mo = (24 - (character_boundary_right - character_boundary_left - 1)) / (character_boundary_right - character_boundary_left - 1); //取模 即可以将放大后比原图宽度多的像素点插在每个原图像素点的个数为Mo
Yu = (24-(character_boundary_right - character_boundary_left - 1)) % (character_boundary_right - character_boundary_left - 1); //取余
if(Yu != 0)
{
Mo_1=24/Yu;//平均Mo_1个像素,插有一个像素, Yu:代表需要在原图的宽度上插Yu个像素点才能达到目标的24个像素
}
// LCD_ShowNum(30,20,Mo,3);//显示模 <调试用>
// LCD_ShowNum(70,20,Yu,3);//显示余
// LCD_ShowNum(100,20,(k1-kk1),3);//显示差值
for(a = Min_240 + 1; a < Max_240; a++)
{ //↓ //宽放大为24像素 高扫描
num2 = 0;
Yu=(24-(character_boundary_right - character_boundary_left - 1)) % (character_boundary_right - character_boundary_left - 1); //取余
for(b = character_boundary_left + 1; b < character_boundary_right; b++)
{ //character_boundary_left → character_boundary_right +1
num = LCD_ReadPoint(b, a);
LCD_DrawPoint(271 + num2,191 + num3, num);
num2++;
Mo = (24-(character_boundary_right - character_boundary_left - 1)) / (character_boundary_right - character_boundary_left - 1); //取模
while(Mo) //变宽 补充的像素
{
LCD_DrawPoint(271 + num2, 191 + num3, num);
Mo--;
num2++;
}
if(Yu != 0) //横轴拉长
{
if(((num2+1) % Mo_1==0) && (num2!=1)) { //该插入的地方
LCD_DrawPoint(271 + num2, 191 + num3, num);
Yu--;
num2++;
}
}
}
num3++;
}
LCD_DrawPoint(271,190,0x07E0); //第二个字符四个绿点 (便于观察) //标记点,4个顶角
LCD_DrawPoint(271,240,0x07E0);
LCD_DrawPoint(295,190,0x07E0);
LCD_DrawPoint(295,240,0x07E0);
//将长度拉长
if((Max_240 - Min_240) < 50) {
Mo = (50 - (Max_240 - Min_240 + 1)) / (Max_240 - Min_240 + 1); //取模
Yu = (50 - (Max_240 - Min_240 + 1)) % (Max_240 - Min_240 + 1); //取余
Mo_1 = 50 / Yu; //平均Mo_1个像素,插有一个像素, Yu:代表需要在原图的长度上插Yu个像素点才能达到目标的24个像素
// LCD_ShowNum(30,170,Mo,3);// <调试用>
// LCD_ShowNum(70,170,Yu,3);//
// LCD_ShowNum(100,170,Max_ChangePoint_240-Min_ChangePoint_240,3);//
num2 = 0;
for(a = 0; a < (Max_240 - Min_240); a++)
{ //↓//复制图像,考虑范围是否需要进行修正?
for(b = 271; b <= 295; b++) //宽度24
{ //271开始复制,295才结束
num = LCD_ReadPoint(b, a + 191);
LCD_DrawPoint(b + 25, 191 + num2, num); //复制像素值
}
num2++; //行差
while(Mo)
{
for(b = 271; b <= 295; b++)
{ //271开始复制,295才结束
num = LCD_ReadPoint(b, a + 191);
LCD_DrawPoint(b + 25, 191 + num2 + a, num); //复制像素值
}
Mo--;
num2++;
}
if(Yu != 0)
{
if((((num2 + 1) % Mo_1) == 0)&& (num2 != 1))
{
for(b = 271; b <= 295; b++)
{ //271开始复制,295才结束
num = LCD_ReadPoint(b, a + 191);
LCD_DrawPoint(b + 25, 191 + num2, num); //复制像素值
}
Yu--;
num2++;
}
}
}
}
LCD_DrawPoint(320,191,0xf800); //在三个字符的最右上角加个红点(便于观察) //标记点,1个顶角
}
}
static vu8 MoShiShiBie_All(vu8 begin,vu8 end) //模式识别(10个数字+26个英文字母共36个标准数组) //字符匹配,模式识别,选择性匹配begin-end
{
vu16 num_save = 0;
vu8 a = 0, b = 0, e = 0, a_save = 0, st1 = 0, st2 = 0, s1 = 0, s2 = 0;
int num1 = 0;
for(a = begin; a < end; a++) //不同的标准数组切换
{ //36
num1 = 0;
for(b = 0; b < 150; b++)
{ //每个字符包含了150个字节字模数据: 即像素24*50=1200。 1200/8=150字节。
st1 = table_picture[b]; //图片转换成的数组 //得到的图片装换的 数组
st2 = Table[150 * a + b];
for(e = 0; e < 8; e++)
{ //逐个字节逐个位进行比较
s1 = st1 & (1 << e);
s2 = st2 & (1 << e);
if(s1 == s2) num1++; //相同则增加
if(s1 != s2) num1--; //不同则减少
}
}
if(num_save < num1)
{
num_save = num1; //匹配程度
a_save = a;
}
LCD_ShowNum(50, 220, a, 2); //显示正在与哪一个标准数组匹配 <调试用>
if(num1 < 0)
{
LCD_ShowNum(70, 220, 0, 4); //显示匹配的正确像素数 <调试用>
} else {
LCD_ShowNum(70, 220, num1, 4); //显示与各个标准数组匹配的正确像素数 <调试用>
}
LCD_ShowNum(120, 220, num_save, 4); //显示像素匹配的最大值 <调试用>
}
return a_save;
}
void CharacterRecognition(void) //字符识别 //字符识别
{
vu16 a = 0, b = 0, e = 0;
vu16 i = 0, u = 0;
vu8 Result = 0; //识别结果
vu8 temp[50] = {0}, temp1[50] = {0};
for(b = Max_blue - 1; b > Min_blue; b--) //由右至左识别,获取各个字符的character_boundary_right,character_boundary_left值
{
while(TableChangePoint_320[b] == 0) b--; //取第1个字符
character_boundary_right_1 = b + 1; //+1 找到字符的左右边界
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_1 = b; //找到字符的左右边界
if((character_boundary_right_1 - character_boundary_left_1) < 4)
{ //省略低于3个像素的位置
while(TableChangePoint_320[b] == 0) b--; // 重新找第1个字符左右边界
character_boundary_right_1 = b + 1; //+1
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_1 = b;
}
while(TableChangePoint_320[b] == 0) b--; //取第2个字符
character_boundary_right_2 = b+1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_2 = b;
if((character_boundary_right_2 - character_boundary_left_2) < 4)
{ //省略低于3个像素的位置
while(TableChangePoint_320[b] == 0) b--; // 重新找第2个字符左右边界
character_boundary_right_2 = b+1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_2 = b;
}
while(TableChangePoint_320[b] == 0) b--; //取第3个字符
character_boundary_right_3 = b+1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_3 = b;
if((character_boundary_right_3 - character_boundary_left_3) < 4)
{ //省略低于3个像素的位置
while(TableChangePoint_320[b] == 0) b--; // 重新找第3个字符左右边界
character_boundary_right_3 = b+1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_3 = b;
}
while(TableChangePoint_320[b] == 0) b--; //取第4个字符
character_boundary_right_4 = b + 1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_4 = b;
if((character_boundary_right_4 - character_boundary_left_4) < 4)
{ //省略低于3个像素的位置
while(TableChangePoint_320[b] == 0) b--; // 重新找第4个字符左右边界
character_boundary_right_4 = b + 1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_4 = b;
}
while(TableChangePoint_320[b] == 0) b--; //取第5个字符
character_boundary_right_5 = b + 1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_5 = b;
if((character_boundary_right_5 - character_boundary_left_5) < 4)
{ //省略低于3个像素的位置
while(TableChangePoint_320[b] == 0) b--; // 重新找第5个字符左右边界
character_boundary_right_5 = b + 1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_5 = b;
}
while(TableChangePoint_320[b] == 0) b--; //取第6个字符
character_boundary_right_6 = b + 1;
while(TableChangePoint_320[b]>0) b--;
character_boundary_left_6 = b;
while(TableChangePoint_320[b] == 0) b--; //取第7个字符
character_boundary_right_7 = b+1;//+1
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_7 = b;
if((character_boundary_right_7 - character_boundary_left_7) < 4)
{ //省略低于3个像素的位置
while(TableChangePoint_320[b] == 0) b--; // 重新找第7个字符左右边界
character_boundary_right_7 = b + 1;
while(TableChangePoint_320[b] > 0) b--;
character_boundary_left_7 = b;
}
while(TableChangePoint_320[b] == 0) b--; //取第8个字符
character_boundary_right_8 = b + 1;
while(TableChangePoint_320[b] > 0)
{
if(b <= Min_blue)
{
break;
}
b--;
}
character_boundary_left_8 = b;
b = Min_blue; //全部找完,跳出循环
}
for(a = Min_ChangePoint_240; a < Max_ChangePoint_240; a++) //划线 将分割出的左右边界显示出来
{
LCD_DrawPoint(character_boundary_right_1, a+1, 0x001f);
LCD_DrawPoint(character_boundary_left_1, a+1, 0x001f);
LCD_DrawPoint(character_boundary_right_2, a+1, 0x001f);
LCD_DrawPoint(character_boundary_left_2, a+1, 0x001f);
LCD_DrawPoint(character_boundary_right_3, a+1, 0x001f);
LCD_DrawPoint(character_boundary_left_3, a+1, 0x001f);
LCD_DrawPoint(character_boundary_right_4, a+1, 0x001f);
LCD_DrawPoint(character_boundary_left_4, a+1, 0x001f);
LCD_DrawPoint(character_boundary_right_5, a+1, 0x001f);
LCD_DrawPoint(character_boundary_left_5, a+1, 0x001f);
LCD_DrawPoint(character_boundary_right_6, a+1, 0x001f);
LCD_DrawPoint(character_boundary_left_6, a+1, 0x001f);
LCD_DrawPoint(character_boundary_right_7, a+1, 0x001f);
LCD_DrawPoint(character_boundary_left_7, a+1, 0x001f);
LCD_DrawPoint(character_boundary_right_8, a+1, 0x001f);
LCD_DrawPoint(character_boundary_left_8, a+1, 0x001f);
}
//归一化处理:大小为24*50
//第1个字符:
Normalized(character_boundary_right_1, character_boundary_left_1); //归一化 24*50
PictureToString(); //图片->数组
Result = MoShiShiBie_All(0, 36); //字符匹配,模式识别,返回a, 0<= a <36
if(Result < 10) {
LCD_ShowNum(240, 220, table_char[Result], 1); //0~9 数字
} else {
LCD_ShowChar(240, 220, table_char[Result], 0); //A~Z 字母
}
table_cardMeasure[6] = Result; //保存识别的车牌结果
//第2个字符:
Normalized(character_boundary_right_2, character_boundary_left_2); //归一化 25*50
PictureToString(); //图片->数组
Result = MoShiShiBie_All(0, 36); //字符匹配,模式识别
if(Result < 10) {
LCD_ShowNum(230, 220, table_char[Result], 1);
} else {
LCD_ShowChar(230, 220, table_char[Result], 0);
}
table_cardMeasure[5] = Result; //保存识别的车牌结果
//第3个字符
Normalized(character_boundary_right_3, character_boundary_left_3); //归一化 25*50
PictureToString(); //图片->数组
Result = MoShiShiBie_All(0, 36); //字符匹配,模式识别
if(Result < 10) {
LCD_ShowNum(220,220,table_char[Result], 1);
}
else {
LCD_ShowChar(220, 220, table_char[Result], 0);
}
table_cardMeasure[4] = Result; //保存识别的车牌结果
//第4个字符
Normalized(character_boundary_right_4, character_boundary_left_4); //归一化 25*50
PictureToString(); //图片->数组
Result = MoShiShiBie_All(0, 36); //字符匹配,模式识别
if(Result < 10) {
LCD_ShowNum(210,220,table_char[Result], 1);
} else {
LCD_ShowChar(210,220,table_char[Result], 0);
}
table_cardMeasure[3] = Result; //保存识别的车牌结果
//第5个字符
Normalized(character_boundary_right_5, character_boundary_left_5); //归一化 25*50
PictureToString(); //图片->数组
Result = MoShiShiBie_All(0, 36); //字符匹配,模式识别
if(Result < 10) {
LCD_ShowNum(200,220,table_char[Result],1);
} else {
LCD_ShowChar(200, 220, table_char[Result], 0);
}
table_cardMeasure[2] = Result; //保存识别的车牌结果
//“。”
LCD_ShowChar(190, 220, '.', 0);
//第6个字符
Normalized(character_boundary_right_7, character_boundary_left_7); //归一化 25*50
PictureToString(); //图片->数组
Result = MoShiShiBie_All(10, 36); //字符匹配,模式识别,只匹配字母
if(Result < 10) {
LCD_ShowNum(180, 220, table_char[Result], 1);
} else {
LCD_ShowChar(180, 220, table_char[Result], 0);
}
table_cardMeasure[1] = Result; //保存识别的车牌结果
//汉字
Normalized(character_boundary_right_8, character_boundary_left_8); //归一化 25*50 最后一个汉字
PictureToString(); //图片->数组
Result = MoShiShiBie_All(36, 42); //字符匹配,匹配汉字
WordShow(Result - 35, 160, 220); //显示汉字
table_cardMeasure[0] = Result - 35; //保存识别的车牌结果
//识别结束
//串口发送车牌信息
if(Result == 36) {
sprintf((char*)temp, "识别结果:渝");
} else if(Result == 37) {
sprintf((char*)temp, "识别结果:闽");
} else if(Result == 38) {
sprintf((char*)temp, "识别结果:沪");
} else if(Result == 39) {
sprintf((char*)temp, "识别结果:浙");
} else if(Result == 40) {
sprintf((char*)temp, "识别结果:苏");
} else if(Result == 41) {
sprintf((char*)temp, "识别结果:粤");
}
sprintf((char*)temp1, "%c.%c%c%c%c%c\r\n"
, table_char_char[table_cardMeasure[1]], table_char_char[table_cardMeasure[2]],
table_char_char[table_cardMeasure[3]], table_char_char[table_cardMeasure[4]],
table_char_char[table_cardMeasure[5]], table_char_char[table_cardMeasure[6]]);
//时间价格界面
//先匹配已保存的车牌号
for(u = 0; u < 5; u++)
{
for(i = 0; i < 7; i++)
{
if(table_card[u][i] != table_cardMeasure[i])
i = 8; //退出第一个车牌信息for循环
}
if(i == 7) //匹配成功
{
LCD_Fill(0x00); //黑屏
Show_Title(); //显示标题
Show_Card(u); //显示第几组车牌
u = 5;
while(GPIO_ReadInputDataBit(KEY1_PORT, KEY2_PIN) == 1); //等待k2按下
}
}
if(i == 9) //无匹配车牌,则保存车牌
{
i = 0;
while(1)
{
if(GPIO_ReadInputDataBit(KEY1_PORT,KEY2_PIN) == 0) break;
LCD_ShowNum(30,220, i / 100, 2);
if(i == 300)
{ //保存数据
for(u = 0; u < 5; u++)
{
if(table_card[u][0] == 0)
{
for(i = 0;i < 7; i++)
{
table_card[u][i] = table_cardMeasure[i];
}
u = 5; //退出循环
}
}
LCD_Fill(0x00); //黑屏
Show_Title(); //显示标题
Show_Card(0); //显示第几组车牌
Show_Card(1);
Show_Card(2);
Show_Card(3);
Show_Card(4);
while(GPIO_ReadInputDataBit(KEY1_PORT,KEY2_PIN)==1); //等待K2按下
break;
}
delay_ms(1);
i++;
}
}
}
algorithm.h
#ifndef __ALGORITHM_H
#define __ALGORITHM_H
#include "stm32f10x.h"
#include "value.h"
void ChangePoint_Show_240(void);
void ChangePoint_Analysis_240(void);
void ChangePoint_Analysis_Blue(void);
void ChangePoint_Analysis_320(void);
void ChangePoint_Show_320(void);
vu8 SegmentationChar(void);
void CharacterRecognition(void);
#endif
main.c
#include "stm32f10x.h"
#include "stm32f10x_it.h"
#include "key.h"
#include "usart.h"
#include "delay.h"
#include "lcd.h"
#include "ov7670.h"
#include "rcc.h"
#include "ShowChar.h"
#include "discern.h"
extern vu8 Red_Vlaue, Green_Value ,Blue_Value;//阈值
int main(void)
{
unsigned int scan_time = 0;
STM32_Clock_Init(16); //初始化时钟
LCD_Init();
Key_Init(); //初始化 KEY1 PA8
OV7670_GPIO_Init(); //OV7670引脚初始化,放在串口初始化前面
//USART1_init(); //初始化串口
TIM3_Configuration(); //10Khz的计数频率,计数到5000为500ms
LCD_Fill(0x6666); //初始化刷绿色屏
while(!Sensor_Init()); //摄像头芯片初始化
LCD_Fill(0xF800); //成功后刷红色屏
delayms(100);
scan_time = 2;
//二值化阈值
Red_Vlaue = 24;
Green_Value = 53;
Blue_Value = 24;
while(1)
{
if(scan_time <= 1) {
CameraDiscern(); //车牌识别
}
if(scan_time > 1) {
CameraScan(); //摄像头扫描测试
LCD_ShowNum(30,220,21 - scan_time, 2);
while(GPIO_ReadInputDataBit(KEY1_PORT,KEY1_PIN)==0) //K1按键按下 跳出停留时间与收费情况
{
LCD_Fill(0x00); //黑屏
Show_Title(); //显示标题
Show_Card(0); //显示第几组车牌
Show_Card(1);
Show_Card(2);
Show_Card(3);
Show_Card(4);
delay_ms(5000);
}
}
if(scan_time == 20) {
scan_time = 0;
}
scan_time++;
}
}
大家如果想省事的话也可直接下载全部工程资料。
完整工程链接:https://download.csdn.net/download/m0_59113542/85004381?spm=1001.2014.3001.5503
欢迎大家指正交流,有空可以一起讨论代码啊。
制作不易,感谢大家支持,感谢!!!!!!
--------------一个正在努力的人