pytorch之数据类型tensor
处理数据(Torch)
Tensor是一种特殊的数据结构,在Pytorch中,就是用Tensor来编码模型的输入、输出以及模型的参数的。
所以你可以认为如果要用pytorch,任何数据都要转为tensor。
数据初始化
方法一:torch.tensor
功能: 构建常规tensor
torch.tensor(data, *, dtype=None, device=None, requires_grad=False, pin_memory=False)
data:初始化tensor的数据,可以是列表(list)、元组(tuple)、numpy的数组ndarray、数字标量和其他类型等。
dtype:指定tensor的数据类型,通常数据类型又如下几种
| dtype | 数据类型描述 |
|---|---|
| torch.float16 or torch.half | 16位浮点型 |
| torch.float32 or torch.float | 32位浮点型 |
| torch.float64 or torch.double | 64位浮点型 |
| torch.uint8 | 8位无符号整型 |
| torch.int8 | 8位有符号整型 |
| torch.int16 or torch.short | 16位有符号整型 |
| torch.int32 or torch.int | 32位有符号整型 |
| torch.int64 or torch.long | 64位有符号整型 |
| torch.bool | bool类型 |
| torch.complex64 or torch.cfloat | 64位复数 |
以上是常用的一些数据类型,如果没有指定这个参数,那么torch会根据data自动推断数据类型,所以如果data里面的数据类型是统一的,就可以,那么大可忽略dtype,让它自动推断。
device:指定数据在什么地方运行,要么是cpu要么是gpu
| 指定运行设备 | 关键字 |
|---|---|
| cpu | ‘cpu’ |
| gpu | ‘cuda:index’ |
如果你的电脑上有多个gpu,那么就可以通过index指定,当然你也可以直接写一个cuda
接下来再讲一下指定设备的方法,通常会有两种方法来指定设备
方式1:定义一个device
data = [[1,2],[3,4]] cpu_device = torch.device('cuda') tensor_data = torch.tensor(data,device=cpu_device)
方式2:直接指定
data = [[1,2],[3,4]] tensor_data = torch.tensor(data,device='cuda')
requires_grad:bool类型,用于指定数据是否可以进行梯度更新,在进行模型训练的过程中,可以将其设置为True,这样进行反向梯度的时候,可以进行参数更新。
pin_memory:bool类型,为True的时候,将tensor分配到固定内存中。要注意的是,这个参数只在device为cpu下才有用。
`
完整例子
torch.tensor([[0.11111, 0.222222, 0.3333333]],dtype=torch.float64,device=torch.device(‘cuda:0’))
**方法二:torch.sparse_coo_tensor**
功能:初始化 构建一个稀疏tensor
torch.sparse_coo_tensor(indices, values, size=None, *, dtype=None, device=None, requires_grad=False)
`
在讲解这个函数的参数之前,先了解一下这个函数构建稀疏矩阵的原理,先贴一张网上大佬们画的图,比较生动
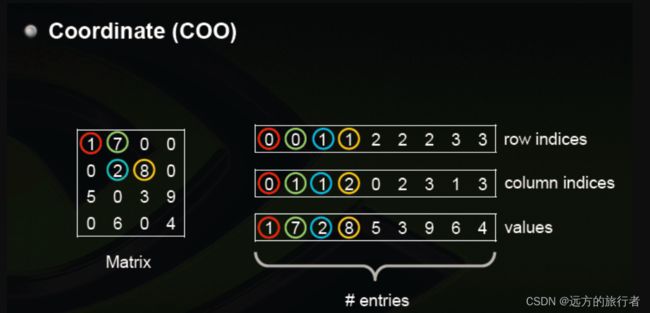
从图中可以看出,左边是一个稀疏矩阵,但是可以通过,右边的数据表示。第一行表示非零数据所在的行,第二行表示非零数据所在的列,第三行表示具体位置的数据大小。
带着这个基础的设计理念,就可以解释每一个参数的意义了
参数说明:
indices:指定非零元素的位置,也就是上图中右边的第一行和第二行。它可以是list,tuple,ndarray,一个整数
values:具体位置上的非零的值,它的顺序是一行一行的算的,第一行的非零值在前,然后顺序排在后面。
size:指定矩阵大小,也就是上图左边矩阵的大小,可以是list或者tuple
dtype:指定数据类型,参考上面的tensor
device :指定设备,参考上面的tensor
requires_grad:指定数据是否可以进行梯度更新,参考上面的tensor
具体例子
将上图例子实现如下
i = torch.tensor([[0,0,1,1,2,2,2,3,3],[0,1,1,2,0,2,3,1,3]]) v = torch.tensor([1,7,2,8,5,3,9,6,4],dtype=torch.float32) spar_tensor = torch.sparse_coo_tensor(i,v,size = [4,4],dtype=torch.float64,device=torch.device('cpu'))
方法三:tensor.asarray
功能:初始化,类似于复制功能
torch.asarray(obj, *, dtype=None, device=None, copy=None, requires_grad=False)
参数说明:
obj:可以是tensor,numpy array等类型
copy: bool类型,如果为True时,就是copy了一份数据,如果是false,则是引用了一份,改变一个数据,另一个会跟着改变。
device:指定设备
requires_grad :指定是否支持求梯度
具体例子
a = torch.tensor([1,2,3]) b = torch.asarray(a) c = torch.asarray(a,copy=True,dtype=torch.float32,device = 'cpu')
方法四:torch.as_strided
功能:创建一个视图,方便观察具体位置的数据
torch.as_strided(input, size, stride, storage_offset=0)
参数说明:
input:tensor,输入的原始tensor
size:定义输出的数据大小,可以是tuple或者int
stride:指定视图的步幅,这个参数其实还比较抽象,它的功能是没隔多少在input上采集数据,可以是tuple或者int。
storage_offset:采集数据的起始位置,通常为int。
具体例子
`
x = torch.randn(3, 3)
t = torch.as_strided(x, (2, 2), (1, 1))
x,t
(tensor([[-0.0215, 0.3483, -1.4443],
[-0.3040, 1.3200, 2.0977],
[ 0.7380, 1.0222, -0.6579]]),
tensor([[-0.0215, 0.3483],
[ 0.3483, -1.4443]]))
`
方法五:torch.from_numpy
功能:从ndarray中初始化tensor
torch.from_numpy(ndarray)
其余方法:
torch.zeros :创建0矩阵
torch.zeros_like :创建0矩阵,通过输入的tensor矩阵的形状创建相同形状的0矩阵tensor
torch.ones : 创建1矩阵
torch.ones_like :创建1矩阵,通过输入的tensor矩阵的形状创建相同形状的1矩阵tensor
torch.range: 和numpy的range类似,只是返回值是tensor
torch.arange: 和numpy的arange类似,只是返回值是tensor
torch.linspace:和numpy的linspace类似,只是返回值是tensor
torch.eye::创建为1的对角矩阵
torch.empty:定义一个空的tensor,等于定义一个变量
torch.empty_like:类似torch.ones_like
torch.full:创建一个指定值填充的tensor矩阵
torch.full_like:类似torch.ones_like
tensor的索引、切片、连接、变异操作
torch.adjoint:用于复数操作,对tensor共轭之后然后转置
torch.argwhere:返回tensor非零值的位置索引
torch.cat:拼接tensor
torch.chunk:将tensor均等拆分
torch.column_stac:可以理解为先转置,然后按列行拼接
torch.tensor_split:拆分tensor
torch.hsplit:类似torch.tensor_split
torch.hstack:垂直拼接tensor
torch.select:返回一个切片的tensor
torch.squeeze:压缩为tensor为1的维度
torch.transpose:tensor不同维度的数据交换,所以如果是二维数据,当是二维时,交换后就是转置。
torch.t: 转置,和torch.transpose类似
torch.take:取得tensor对应位置的值,然后返回新的tensor
torch.unsqueeze:增加tensor的维度
数学操作
torch.acos:计算tensor的反余弦
torch.cos:余弦操作
torch.sin:正弦操作
torch.tan:正切操作
torch.add:加操作
torch.sub:减操作
torch.mul:tensor对应位置相乘
torch.mm:tensor矩阵相乘
torch.div:除操作
torch.pow:幂运算
torch.exp:指数操作
torch.log:log操作
torhc.sqrt:求根号操作
torch.ceil:向上取整
torch.floor:向下取整
torch.abs:返回tensor绝对值
torch.neg:tensor取反
torch.frac:获取小数部分
torch.imag:取复数虚部
torch.real:取复数实部
torch.round:四舍五入取整
torch.trunc:去掉小数点
torch.deg2rad:角度转为幅度
torch.rad2deg:幅度转为角度
torch.clip:同torch.clamp,将一个数组大小限定在一个范围内,大于最大值的,用最大值代替,小于最小值的用最小值代替
torch.argmax:取不同维度的最大值的索引
torch.argmin:取不同维度的最小值的索引
torch.amax:取不同维度的最大值
torch.amin:取不同维度的最小值
torch.aminmax:取不同维度的最大值和最小值
torch.all:是否所有值都为true
torch.any:是否有任何一个为true
torch.max:求所有值的最大值
torch.min:求所有值的最小值
torch.mean:求均值
torch.nanmean:求非空值的均值
torch.median:求中位数
torch.nanmedian:求非空值的中位数
torch…mode:找出众数和众数出现的最后一个索引位置
torch.nansum:将非零值求和
torch.sum:求和
torch.prod:值相乘
torch.std:均方差
torch.unique:求唯一值
torch.var:求方差
torch.argsort:返回按维度排序后的索引
torch.eq:比较对应位置是否相等
torch.equal:比较所有值为啥
torch.ge:对应位置大于等于
torch.gt:对应位置大于
torch.le:对应位置小于等于
torch.lt:对应位置小于
torch.ne:对应位置不等于操作
torch.isin:包含关系
torch.sort:排序操作
torch.topk:求topK