opencv学习笔记六--图像拼接
import numpy as np
import cv2
import matplotlib.pyplot as plt
class Stitcher:
def stitch(self, images, ratio=0.75, reprojThresh=4.0,showMatches=False):
(imageB, imageA) = images
(kpsA, featuresA) = self.detectAndDescribe(imageA)
(kpsB, featuresB) = self.detectAndDescribe(imageB)
M = self.matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)
if M is None:
return None
(matches, H, status) = M
result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0]))
self.cv_show('result', result)
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB
self.cv_show('result', result)
if showMatches:
vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches, status)
return (result, vis)
return result
def cv_show(self,name,img):
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
def cv_show1(self,name,img):
plt.imshow(img)
plt.show()
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
def detectAndDescribe(self, image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
descriptor = cv2.xfeatures2d.SIFT_create()
(kps, features) = descriptor.detectAndCompute(image, None)
kps = np.float32([kp.pt for kp in kps])
return (kps, features)
def matchKeypoints(self, kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh):
matcher = cv2.BFMatcher()
rawMatches = matcher.knnMatch(featuresA, featuresB, 2)
matches = []
for m in rawMatches:
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
matches.append((m[0].trainIdx, m[0].queryIdx))
if len(matches) > 4:
ptsA = np.float32([kpsA[i] for (_, i) in matches])
ptsB = np.float32([kpsB[i] for (i, _) in matches])
(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, reprojThresh)
return (matches, H, status)
return None
def drawMatches(self, imageA, imageB, kpsA, kpsB, matches, status):
(hA, wA) = imageA.shape[:2]
(hB, wB) = imageB.shape[:2]
vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
for ((trainIdx, queryIdx), s) in zip(matches, status):
if s == 1:
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
cv2.line(vis, ptA, ptB, (0, 255, 0), 1)
return vis
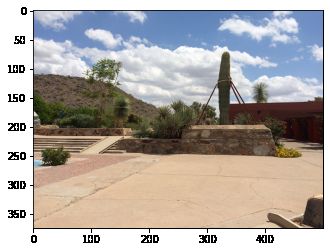
imageA = cv2.imread("left_01.png")
imageB = cv2.imread("right_01.png")
stitcher = Stitcher()
(result, vis) = stitcher.stitch([imageA, imageB], showMatches=True)


stitcher.cv_show("Image A", imageA)
stitcher.cv_show("Image B", imageB)
stitcher.cv_show("Keypoint Matches", vis)
stitcher.cv_show("Result", result)