Proteus仿真及应用——51单片机系列
Proteus简单操作
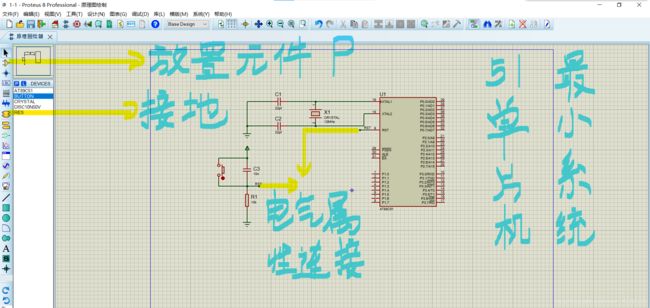
- 1. 绘制最小系统
- 2. 流水灯
- 3. 实现流水灯的通用方法
- 4.数码管显示
-
- 4.1静态显示:每个数码管与一组I/O口相连,全部亮。
- 4.2动态显示:段选线由==一组==I/O口相连,位码线由==一根==I/O口相连,逐个显示。
- 5. 独立按键
- 6. 矩阵键盘
- 7. 定时器
-
- 一、定时/计数器的方式寄存器TMOD
- 二、定时器/计数器的控制寄存器TCON
- 三、工作方式
-
- 1.方式0 13位
- 2.方式1 16位
- 3.方式2 8位自动重置定时/计数器
- 4.方式3 8位定时/计数器(只有配置T0才能使用)
- 8.计数器
- 9. 中断原理和外部中断的实现
- 10.串口通信
- 11. LCD1602的应用
- 12.简易时钟的实现
- 13.点阵
- 14.DA转换及波形实现
- 15.AD转换原理:数字电压表
- 16.直流电机
- 17.步进电机
- 18.DS1302的控制
1. 绘制最小系统
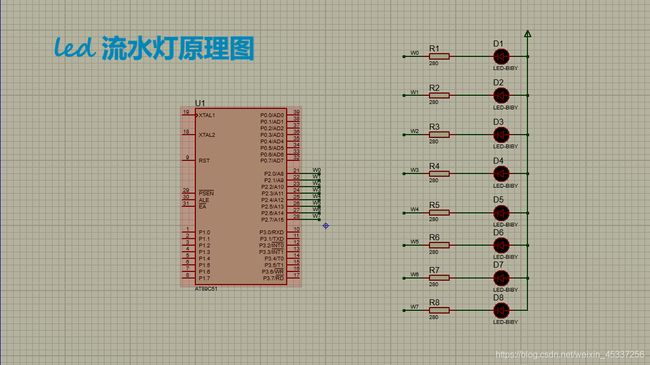
2. 流水灯
电阻:RES
LED:LED-BIBY
电源:Power
/*
时间:2021/2/14
C语言实现流水灯
*/
# include "reg51.h"
sbit LED0 = P2^0;
void delay(unsigned int n)
{
unsigned int i, j;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
void led()
{
int i = 0;
for (i=0; i<8; i++)
{
P2 = ~(0x01<<i);
delay(500);
}
}
void main()
{
while(1)
{
led();
}
}
3. 实现流水灯的通用方法
// 数组方式显示流水灯效果
# include "reg51.h"
// 定义数组
unsigned char leds[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
void delay(unsigned int n)
{
unsigned int i, j;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
void led()
{
int i;
for (i=0; i<8; i++)
{
P2 = ~leds[i];
delay(100);
}
}
void main()
{
while(1)
{
led();
}
}
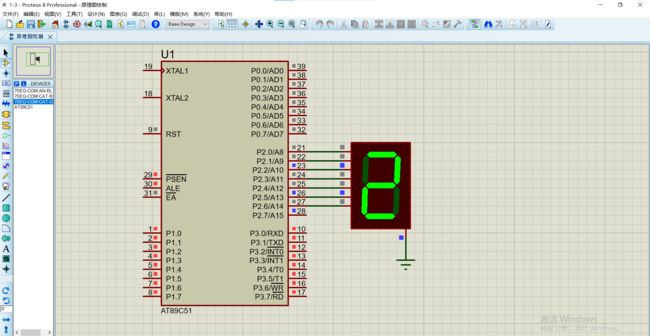
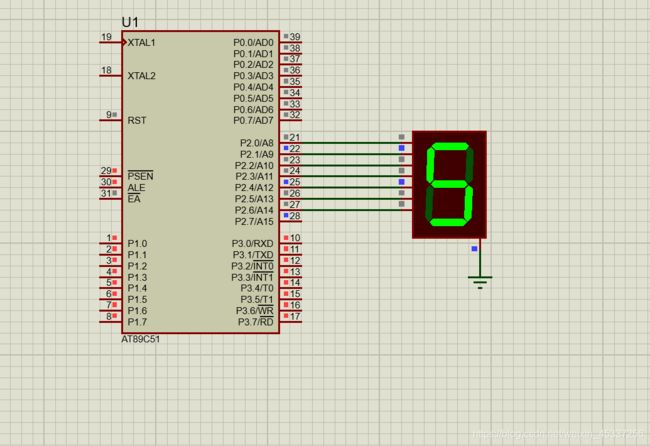
4.数码管显示
4.1静态显示:每个数码管与一组I/O口相连,全部亮。
4.2动态显示:段选线由一组I/O口相连,位码线由一根I/O口相连,逐个显示。
数码管:7seg
- 地线在下面的为共阴
// 数码管静态共阴显示0-9
# include "reg51.h"
unsigned char s[] = {0X3F, 0X06, 0X5B, 0X4F, 0X66, 0X6D, 0X7D, 0X07, 0X7F, 0X6F}; // 共阴0-9
/* {0X77, 0X7C, 0X39, 0X5E, 0X79, 0X71, 0X73, 0X3E, 0X31, 0X6E,}
{0X38, 0X00}
静态显示字符0-9 A-F P U T Y L “灭” */
void delay(unsigned char n)
{
unsigned char i, j;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
void smg()
{
int i = 0;
for (i=0; i<10; i++)
{
P2 = s[i];
delay(1000);
}
}
void main()
{
while(1)
{
smg();
}
}
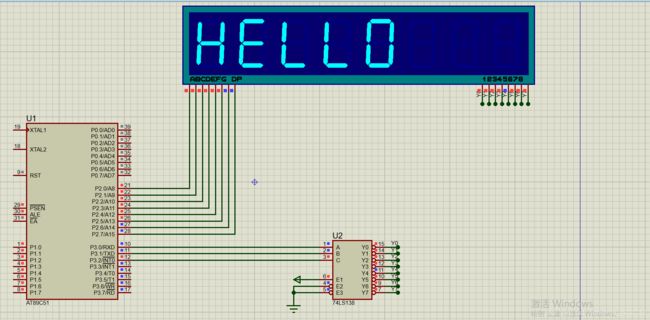
// 74LS138译码器和单片机结合使用动态显示HELLO
# include "reg51.h"
unsigned char s[] = {0X76, 0X79, 0X38, 0X38, 0X3F}; // 共阴HELLO
unsigned char sbi[] = {0X00, 0X01, 0X02, 0X03, 0X04, 0X05, 0X06, 0X07};
/* {0X77, 0X7C, 0X39, 0X5E, 0X79, 0X71, 0X73, 0X3E, 0X31, 0X6E,}
{0X38, 0X00}
静态显示字符0-9 A-F P U T Y L “灭” */
void delay(unsigned char n)
{
unsigned char i, j;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
void smg()
{
int i = 0;
for (i=0; i<5; i++)
{
P3 = sbi[i];
P2 = s[i];
delay(10);
}
}
void main()
{
while(1)
{
smg();
}
}
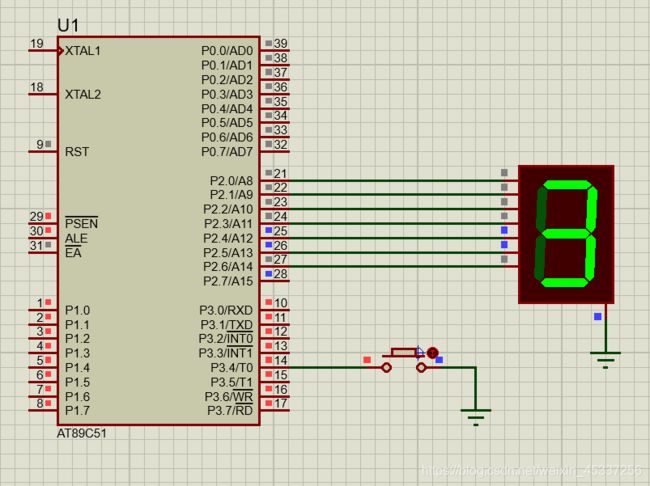
5. 独立按键
独立按键:button

// 独立按键的实现方法
# include "reg51.h"
sbit key0 = P1^0;
unsigned char s[] = {0X3F, 0X06, 0X5B, 0X4F, 0X66, 0X6D, 0X7D, 0X07, 0X7F, 0X6F}; // 共阴0-9
unsigned char num = 0;
unsigned char flag = 0;
/*
void delay(unsigned int n) // 与方法一连用 方法二利用标志位的方法不需要延迟函数
{
unsigned int i,j;
for (i=0; i
void key()
{
// 软件消抖方法一:延迟函数
/* if (key0 == 0)
{
delay(200);
if (key0 == 0)
{
num++;
}
}
*/
// 软件消抖方法二:标志位
if (key0 == 0 && flag == 0)
{
flag = 1;
}
if (flag == 1 && key0 == 1)
{
num++;
flag = 0;
}
}
void seg()
{
P2 = s[num];
if (num == 10)
{
num = 0;
}
}
void main()
{
while(1)
{
key();
seg();
}
}
6. 矩阵键盘

/*
2021-2-25
矩阵键盘的实现
*/
# include "reg51.h"
unsigned char num = 99;
unsigned char s[] = {0X3F, 0X06, 0X5B, 0X4F, 0X66, 0X6D, 0X7D, 0X07, 0X7F, 0X6F}; // 共阴0-9
void delay(unsigned int n)
{
unsigned int i, j;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
void key_scan()
{
unsigned char temp = 0,temp0 = 0,temp1 = 0;
P1 = 0xf0;
/*----------------检测按键是否按下----------------*/
if (P1 != 0xf0) //
{
delay(200);
temp0 = P1;
P1 = 0x0f;
if (P1 != 0x0f)
{
temp1 = P1;
}
}
/*-----------------检测按键的值-------------------*/
temp = temp0 + temp1;
if (temp == 0xee)
{
num = 0;
}
if (temp == 0xed)
{
num = 1;
}
}
void display()
{
P2 = s[num];
}
void main()
{
while(1)
{
key_scan();
display();
}
}
7. 定时器
一、定时/计数器的方式寄存器TMOD
主要的是:工作方式1
二、定时器/计数器的控制寄存器TCON
三、工作方式
1.方式0 13位
X = 8192 - N/(12/fosc) (计数值N 和 初值X)
上次计数值为0,要重复计数需要重置初值
2.方式1 16位
X = 65536 - N /(12/fosc)
上次计数值为0,要重复计数需要重置初值
3.方式2 8位自动重置定时/计数器
4.方式3 8位定时/计数器(只有配置T0才能使用)
计数值与初值的关系都为:X = 256-N/(12/fosc)
计数器自动配置初值,不需要用户重置。
// 定时器
# include "reg51.h"
unsigned char s[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
unsigned char count = 0, num = 0;
void inittimer()
{
TMOD = 0x01; // 0000 0001
TH0 = (65536 - 50000) / 256; // 50ms = 50000us 初值 >> 8
TL0 = (65536 - 50000) % 256;
ET0 = 1; // 开启定时器0的总中断
EA = 1; // 开启总中断
TR0 = 1; //启动定时器0
}
void display()
{
P2 = s[num];
if (num == 10)
{
num = 0;
}
}
void timer_isr() interrupt 1 // 0表示外部中断0; 1表示定时器中断0; 2表示外部中断1;3表示定时器中断1;4表示串口中断
{
TH0 = (65536 - 50000) / 256; // 50ms = 50000us 初值 >> 8
TL0 = (65536 - 50000) % 256;
count++;
if (count == 20) // 定时1s
{
num++;
count = 0;
}
}
void main()
{
inittimer();
while(1)
{
display();
}
}
8.计数器
C/T 端赋值为1,计数方式:X = 2^(位) - N
// 8位重置计数器
# include "reg51.h"
unsigned char s[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
unsigned char num = 0;
void initcounter()
{
TMOD = 0X06; // 0000 0110 8位自动重置
TH0 = 256 - 3;
TL0 = 256 - 3;
ET0 = 1;
EA = 1;
TR0 = 1;
}
void display()
{
P2 = s[num];
if (num == 10)
{
num = 0;
}
}
void counter_isr() interrupt 1
{
num++;
}
void main()
{
initcounter();
while(1)
{
display();
}
}
9. 中断原理和外部中断的实现
// 外部中断
# include "reg51.h"
unsigned char s[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
unsigned char num = 0;
sbit ex = P3^2;
void initex()
{
IT0 = 1;
EX0 = 1;
EA = 1;
ex = 1;
}
void display()
{
P2 = s[num];
if (num == 10)
{
num = 0;
}
}
void ex_isr() interrupt 0
{
num++;
}
void main()
{
initex();
while(1)
{
display();
}
}
10.串口通信
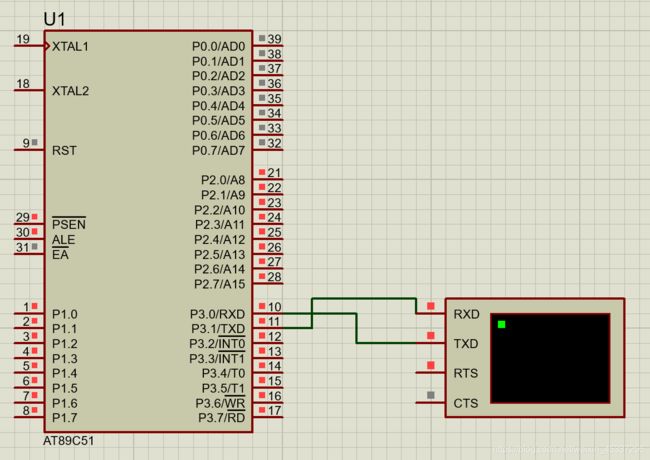
// 串口通信
# include "reg51.h"
unsigned char recdat = 0, flag = 0;
void initscon()
{
SCON = 0X50; // 0101 0000
TMOD = 0X20; // 0010 0000
TH1 = 256 - 3;
TL1 = 256 - 3;
ES = 1;
EA = 1;
TR1 = 1;
}
void scon_isr() interrupt 4 // 串口中断
{
recdat = SBUF;
RI = 0;
flag = 1;
}
void senddat()
{
SBUF = recdat;
while(!TI);
TI = 0;
}
void main()
{
initscon();
while(1)
{
if (flag == 1)
{
senddat();
flag = 0;
}
}
}
11. LCD1602的应用
- LCD1602常用的指令码:
- 0X38:设置16 * 2 显示,5*7点阵, 8位数据接口
- 0X0C:设置开显示,不显示光标
- 0X06:写一个字符后地址指针加1
- 0X01: 显示清0,数据指针清0
- 0X80:LCD第一行的起始地址
- 0X80+0X40:LCD第二行的起始地址

// LCD 显示
# include "reg51.h"
sbit RS = P3^0;
sbit RW = P3^1;
sbit E = P3^2;
unsigned char str[] = {"zero-money"};
void delay(unsigned char n)
{
unsigned int i = 0, j = 0;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
// 写命令
void writecom(unsigned char com)
{
RS = 0;
RW = 0;
E = 0;
P2 = com;
delay(5); // 延时根据实际效果判断
E = 1;
E = 0;
}
// 写数据
void writedate(unsigned char date)
{
RS = 1;
RW = 0;
E = 0;
P2 = date;
delay(5);
E = 1;
E = 0;
}
// 初始化
void initlcd()
{
writecom(0x38);
writecom(0x0c);
writecom(0x06);
writecom(0x01);
}
void display()
{
unsigned int i = 0;
writecom(0x80 + 3); // 第二行中间显示:0x80 + 3 + 0x40
delay(5);
/* 单个字符显示
writedate('Z');
delay(5);
writedate('e');
delay(5);
writedate('r');
delay(5);
writedate('o');
delay(5);
*/
// 字符串显示
while (str[i] != '\0')
{
writedate (str[i]);
delay(5);
i++;
}
}
void main()
{
initlcd();
while(1)
{
display();
}
}
12.简易时钟的实现

// 简易时钟
# include "reg51.h"
sbit RS = P3^0;
sbit RW = P3^1;
sbit E = P3^2;
unsigned char count = 0;
unsigned int hour = 9, min = 31, sec = 0;
unsigned char str[] = {"0123456789"};
unsigned char str1[] = {"Zero-Money's CLK"};
void delay(unsigned char n)
{
unsigned int i = 0, j = 0;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
// 写命令
void writecom(unsigned char com)
{
RS = 0;
RW = 0;
E = 0;
P2 = com;
delay(5); // 延时根据实际效果判断
E = 1;
E = 0;
}
// 写数据
void writedate(unsigned char date)
{
RS = 1;
RW = 0;
E = 0;
P2 = date;
delay(5);
E = 1;
E = 0;
}
// 初始化
void initlcd()
{
writecom(0x38);
writecom(0x0c);
writecom(0x06);
writecom(0x01);
}
void display()
{
unsigned char temp0 = 0, temp1 = 0, temp2 = 0, temp3 = 0, temp4 = 0, temp5 = 0;
unsigned char i = 0;
temp0 = hour / 10;
temp1 = hour % 10;
temp2 = min / 10;
temp3 = min % 10;
temp4 = sec / 10;
temp5 = sec % 10;
writecom(0X80);
delay(5);
while(str1[i] != '\0')
{
writedate(str1[i]);
delay(5);
i++;
}
writecom(0X80 + 0X40 + 4);
delay(5);
writedate(str[temp0]);
delay(5);
writedate(str[temp1]);
delay(5);
writedate(':');
delay(5);
writedate(str[temp2]);
delay(5);
writedate(str[temp3]);
delay(5);
writedate(':');
delay(5);
writedate(str[temp4]);
delay(5);
writedate(str[temp5]);
delay(5);
}
void inittimer()
{
TMOD = 0x01;
TH0 = (65536-50000)/256; // 50ms
TL0 = (65536-50000)%256;
ET0 = 1;
EA = 1;
TR0 = 1;
}
void timer0_isr() interrupt 1
{
TH0 = (65536-50000)/256; // 50ms
TL0 = (65536-50000)%256;
count++;
if (count == 20) // 1s
{
sec = sec + 1;
count = 0;
}
if (sec == 60)
{
min = min + 1;
sec = 0;
}
if (min == 60)
{
hour = hour + 1;
min = 0;
}
if (hour == 24)
{
hour = 0;
}
}
void main()
{
initlcd();
inittimer();
while(1)
{
display();
}
}
13.点阵
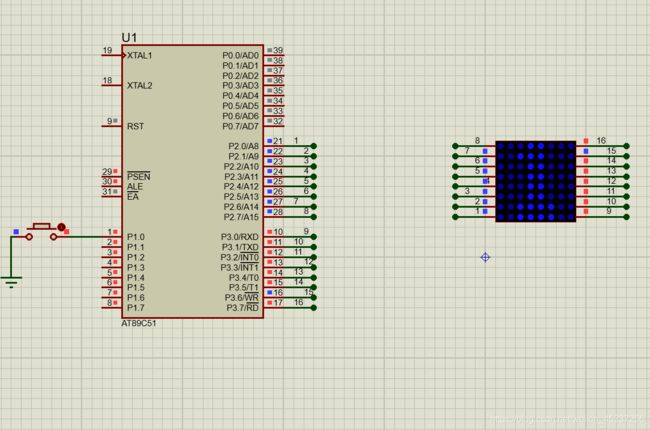
// 点阵的显示
# include "reg51.h"
unsigned char code tab[] = { 0x00, 0x7e, 0xff, 0xc3, 0xc3, 0xff, 0x7e, 0x00, // 0
0x00, 0x00, 0x43, 0xff, 0xff, 0x03, 0x00, 0x00, // 1
0x00, 0x63, 0xc7, 0xcf, 0xdb, 0xf3, 0x63, 0x00, // 2
0x00, 0x42, 0xdb, 0xdb, 0xdb, 0xff, 0x66, 0x00, // 3
0x00, 0x3e, 0x46, 0xff, 0xff, 0x06, 0x06, 0x00, // 4
};
unsigned char row[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};
unsigned char num = 0, flag = 0;
sbit key0 = P1^0;
void key()
{
if (flag == 0 && key0 == 0)
{
flag = 1;
}
if (flag == 1 && key0 == 1)
{
num++;
flag = 0;
}
if (num == 5)
{
num = 0;
}
}
void matrix()
{
unsigned int i = 0;
for (i=8*num; i<8*(num+1); i++) //
{
P3 = ~row[i-8*num];
P2 = tab[i];
}
}
void main()
{
while(1)
{
matrix();
key();
}
}
14.DA转换及波形实现

// DA转换及相关波形
# include "reg51.h"
unsigned int value = 100, flag = 0;
sbit key0 = P1^0;
sbit key1 = P1^1;
void key()
{
if (key0 == 0 && flag == 0)
{
flag = 1;
}
if (flag == 1 && key0 == 1)
{
value += 10;
flag = 0;
}
if (key1 == 0 && flag == 0)
{
flag = 1;
}
if (flag == 1 && key1 == 1)
{
value -= 10;
flag = 0;
}
}
void delay(unsigned int n)
{
int i=0, j=0;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
/* pwm波形
void PWM()
{
P2 = 0;
delay(100); // 占空比变化的方法一: 改变延迟时间
P2 = 255;
delay(value);
}
*/
void stair()
{
int i = 0;
for (i=0; i<255; i++)
{
P2 = i;
}
for (i=255; i<0; i--)
{
P2 = i;
}
}
void main()
{
while(1)
{
// PWM();
stair(); // 锯齿波
key();
}
}
15.AD转换原理:数字电压表

// 数字电压表
# include "reg51.h"
sbit st = P3^0;
sbit eoc = P3^1;
sbit oe = P3^2;
sbit RS = P3^3;
sbit RW = P3^4;
sbit E = P3^5;
unsigned int vol = 0;
unsigned char t[] = {"012346789"};
unsigned char str[] = {"VOLTAGE: "};
void delay(unsigned char n)
{
unsigned int i = 0, j = 0;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
// 写数据
void writedate(unsigned int date)
{
RS = 1;
RW = 0;
E = 0;
P1 = date;
delay(5);
E = 1;
E = 0;
}
// 写命令
void writecom(unsigned char com)
{
RS = 0;
RW = 0;
E = 0;
P1 = com;
delay(5); // 延时根据实际效果判断
E = 1;
E = 0;
}
// 初始化
void initlcd()
{
writecom(0x38);
writecom(0x0c);
writecom(0x06);
writecom(0x01);
}
void adc()
{
// 开启START
st = 0;
st = 1;
delay(5);
st = 0;
while (eoc != 1);
oe = 1;
vol = P2;
oe = 0;
}
void display()
{
unsigned char temp0 = 0, temp1 = 0, temp2 = 0;
int i = 0;
vol = vol * 100 / 51;
temp0 = vol/100;
temp1 = (vol%100)/10;
temp2 = vol%10;
writecom(0x80);
delay(5);
for(i=0; i<8; i++)
{
writedate(str[i]);
delay(5);
}
writecom(0x80 + 0x40 + 4);
delay(5);
writedate(t[temp0]);
delay(5);
writedate('.');
delay(5);
writedate(t[temp1]);
delay(5);
writedate(t[temp2]);
delay(5);
writedate('V');
delay(5);
}
void main()
{
initlcd();
while(1)
{
adc();
display();
}
}
16.直流电机
-
一、直流电机的控制:
-
1.方向控制:直流电机只有正负极,只需交换正负极就可以调节正反转。
-
2.转速控制:负载变化不大的时候,加在直流电动机两端的电压大小与其速度近似成正比。
-
二、PWM技术:
-
1.电动机的电枢绕组两端的电压平均值U为:U = (t1/T) Us = D * Us*
-
2.D为PWM的占空比:D = t1 / T
-
占空比:一个周期之内高电平的时间与整个周期时长之比。范围:0~1
-
三、L293D 芯片:
-
顺时针转动:最大转速192

-
占空比%50:逆时针转速-96

// 51单片机对直流电机的控制
# include "reg51.h"
typedef unsigned int uint;
sbit IN0 = P2^0;
sbit IN1 = P2^1;
sbit E = P2^2;
//void delay(uint n)
//{
// uint i = 0, j = 0;
// for (i=0; i
// {
// for (j=0; j<120; j++);
// }
//}
void motor()
{
IN0 = 0;
// IN1 = 1;
// delay(25);
// IN1 = 1;
// delay(75);
E = 1;
}
void inittimer()
{
TMOD = 0X01;
TH0 = (65536 - 10000)/256;
TL0 = (65536 - 10000)%256;
ET0 = 1;
EA = 1;
TR0 = 1;
IN1 = 0;
}
void timer_isr() interrupt 1
{
TH0 = (65536 - 10000)/256;
TL0 = (65536 - 10000)%256; // 占空比:%50
IN1 = ~IN1;
}
void main()
{
inittimer();
while(1)
{
motor();
}
}
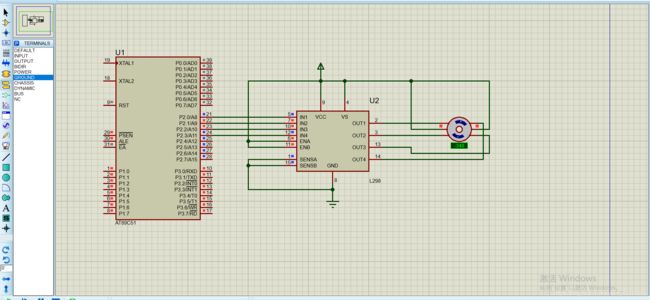
17.步进电机
- 驱动芯片:L298
- 四相步进电机四步法和八步法:四步法:给ABCD引脚给控制信号:1001、1100、0110、0011步进电机顺时针转动。八步法:四步法的一半,1001、1000、1100、0100、0110、0010、0011、0001
// 步进电机
# include "reg51.h"
typedef unsigned char uchar;
typedef unsigned int uint;
uchar st[] = {0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01};
void delay(uint n)
{
uint i = 0, j = 0;
for (i=0; i<n; i++)
{
for (j=0; j<120; j++);
}
}
void stepper()
{
int i = 0;
for (i=7; i>0; i--) // 反转 每次转动45°
{
P2 = st[i];
delay(100);
}
}
void main()
{
while(1)
{
stepper();
}
}
18.DS1302的控制
- 时钟芯片:同步串行通信方式,通信只需要:RES(复位线)、I/O(数据线)、SCLK(串行时钟)
- 读写:低位在前,高位在后