课程笔记-三维点云处理04 ——Model Fitting
课程笔记-三维点云处理04 ——Model Fitting
本系列笔记是对深蓝学院所开设的课程:《三维点云处理》的笔记
课程每周更新,我也会努力将每周的知识点进行总结,并且整理成笔记发上来,欢迎各位多多交流&批评指正!!
本文主要为课程第四章的笔记!
课程链接:
三维点云处理——深蓝学院
正式内容:
####################################################
本节课大纲:

- 首先继续将谱聚类 上节课只讲了步骤没有讲原理
- 介绍三个模型拟合的算法: 最小二乘法、霍夫变换、RANSAC
上节课回顾

讲了三种聚类算法 Kmeans GMM 和谱聚类
前两种都是基于欧式距离的 谱聚类更多参考数据的密集程度,并且能够自确定K的数量
Spectral Clustering
谱聚类构建步骤:

- 建立相似矩阵
- 用拉普拉斯矩阵L对矩阵进行计算
- 特征值分解,求对应于最小的K个特征值的特征向量
- 将特征向量组成一个v矩阵
- 对v矩阵的每一行都做一个Kmeans
- 对每一个点所在的类进行Kmeans分类
谱聚类原理

相当于将点按照无向图的原理做链接。
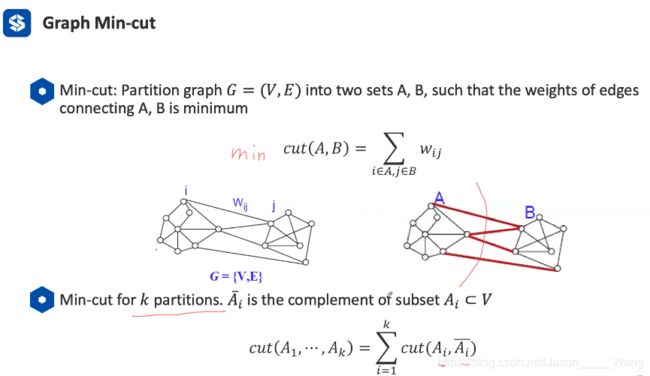
可以将谱聚类问题转化为图切割问题

但是图切割会遇到问题:理想的分割应该切到红色和蓝色之间,但是事实上可能切到最边上这两个点,因为这样也能满足条件另损失函数很小
解决方法:可以加一个限制条件,使切出来的每一块都不至于太小
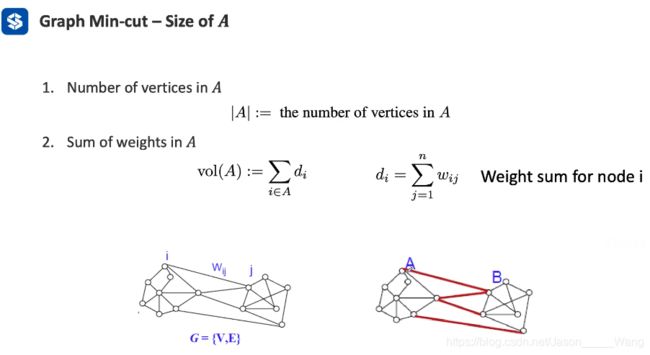
表示A分区大小的有两种该方法 一个是按照其中元素个数划分 另一个是按照连接疏密的程度(权重划分)
分别对应两种切割的方法:RatioCut 和 NormalizedCut

一般都是偏向于用有归一化的谱聚类,因此也用对应的 normalized cut 算法
谱聚类证明
直观证明:

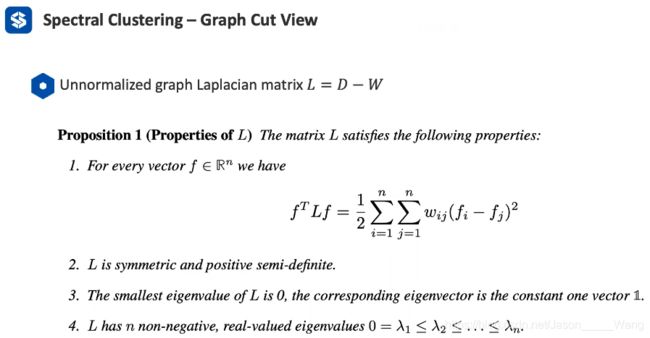
要用到拉普拉斯矩阵

有几个分区,就能够在矩阵中找到几个特征值为0的向量
拉普拉斯矩阵可以把聚类的结果直接体现在特征向量上,所以比较方便。
特性
1。 拉普拉斯矩阵的特性
具体证明如下:

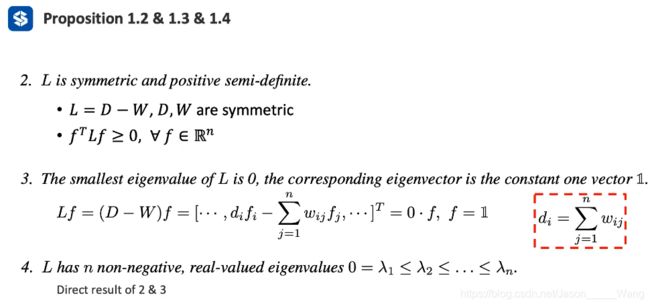
性质2: 有多少个连通域就有多少个特征值为0
证明如下:

具体推导过程忽略
证明

总结
一般用normalize的
谱聚类可以用图切割的思想去理解

总结 谱聚类的优点、缺点、复杂度
优点:在所有数据集上都比较好用
缺点:计算量比较复杂
meanshift & dbscan
这一节介绍一些轻松简单的聚类方法,跟谱聚类相比比较易于理解与计算 只做介绍不做推导
两种方法在实际应用场景中都会常见
mean shift

引入:一个点云图里有一个圆,找出一个点使得以他为圆心的点最多
方法:类似于一个爬山的思想,先寻找一个圆,根据圆里面点的分布求位置坐标,然后根据分布求平均坐标作为圆心将圆移动,从而将圆的位置改变,进入下一个圆
如何将meanshift应用在聚类中?
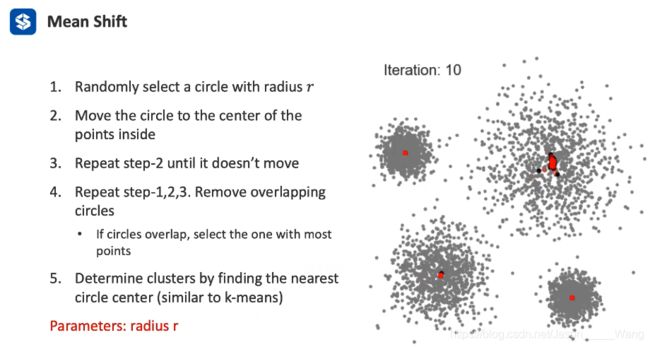
- 先将一个圆按照密度的方法移动到一个使他不再动的位置为止 (前三步)
- 重新找一个圆,同样让其按照meanshift方法移动 (重复多次)
- 将重叠的圆 取里面包含数量最多的圆,其他的圆去掉,剩下多少圆就说明有多少类别。
有些像进化算法
总结:

因为还是最邻近的,所以对高纬度的数据处理性能不佳
DBSCAN
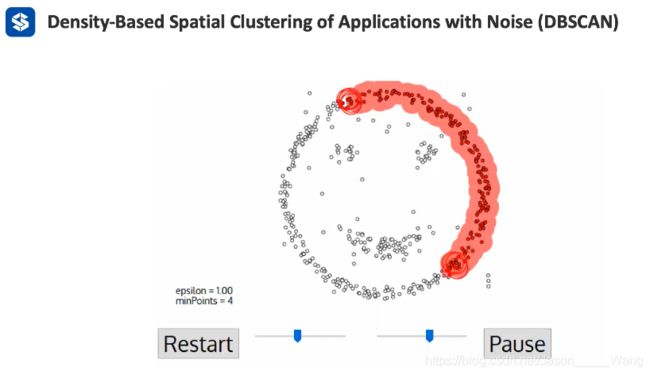
跟meanshift相比效果更好,但复杂度却没有更高
类似于漫水算法
从一个点出发 找到离自己最近的点往前走
算法步骤:

- 随便选一个没有经过过的点 即为P 然后找一个半径圆 统计圆内数量,如果达到要求就可以记为一类
- 如果没有达到要求,就扔掉 视为噪声
- 访问圆中的每一个点,并且标记为已经访问,并归类
- 重复上面的做法 进行分类

一个点有两个标签 :一个是类标签 决定了是哪一类的 ;另一个是性质标签,分为核心点;边界点;噪声
只要是核心点都进行搜索 边界点不进行搜索但进行归类 噪声点不进行归类
总结:
对噪声比较稳定 比较简单
但是比较吃 最小周围点数 设置的数值(数值的选取和设置影响对性能影响比较大
而且在处理比较稠密的点(或者距离区间比较相近的点时表现没有那么好)
聚类算法总结
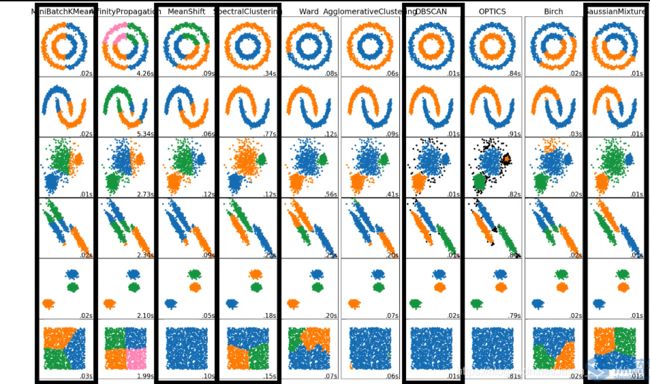
一共讲了上面这几种例子,针对不同的数据分类方式的表现各异。
主要分两类 一类是基于距离的 另一类是基于连接的 各有优劣 。
通过上图可以看出 谱聚类在每一个场景下都有不错的发挥,属于鲁棒性比较强的算法。
模型拟合部分 model fitting
以如何拟合一条二维的直线为例进行讲解


- 如果知道所有的点都是内联值,可以用最小二乘直接拟合
- 如果有离群值,但不是特别的多 可以用加强最小二乘 霍夫变换 RANSAC (对噪声更加鲁棒)
- 如果大部分是噪声点 只能用 霍夫变换 RANSAC
Robust Least Square 鲁棒最小二乘
最小二乘
把问题变成平方和的模式

最小二乘的标量表示
用矩阵形式表示如下:

用A矩阵的最小特征向量去解就可以
一般对于最小二乘有三种写法:

最小二乘法对于噪声比较敏感,所以要提出加强最小二乘
Robust Least Square

用绝对值等一些对极端值反应较小的处理方法 来代替平方数 ,以此减小平方数对其的冲击

如何解通用的最小二乘方法:
梯度下降法
高斯牛顿法
等一些其他的方法
总结:

有点:简单 快速
缺点 :抵抗噪声能力差
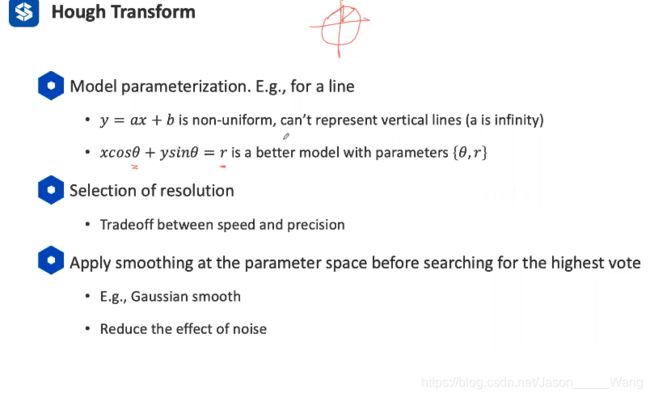
霍夫变换
霍夫变换在图像当中最广泛的应用就是求线
核心思想是:原始空间的点可以转化成参数空间中的线或线转点

将数据点翻转 做霍夫投票

两个点可以取平均点

用一个 θ角来表示空间中的直线
然后进行霍夫投票
需要进行区域的划分 (结合速度和精度综合考量)
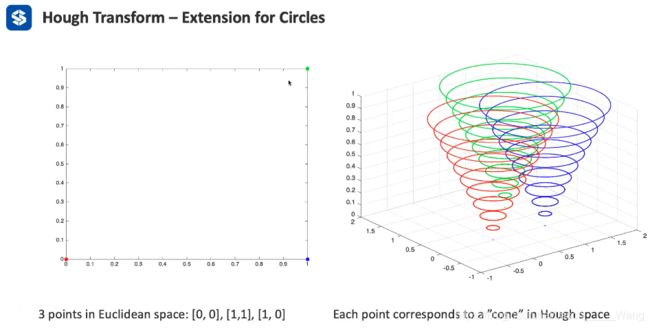
如果是三维空间坐标下 可以用r 和 θ 的坐标 进行求解
用这个方法可以求出三维空间中的圆锥

然后再通过霍夫变换得到参数:
总结:

好处: 因为是基于投票的方法 ,所以对噪声干扰强 而且可以针对不完整的形状进行补充
劣势: 参数不能过高,因为每一个参数都是一维空间 所以一般只用在2维和3维的情况下
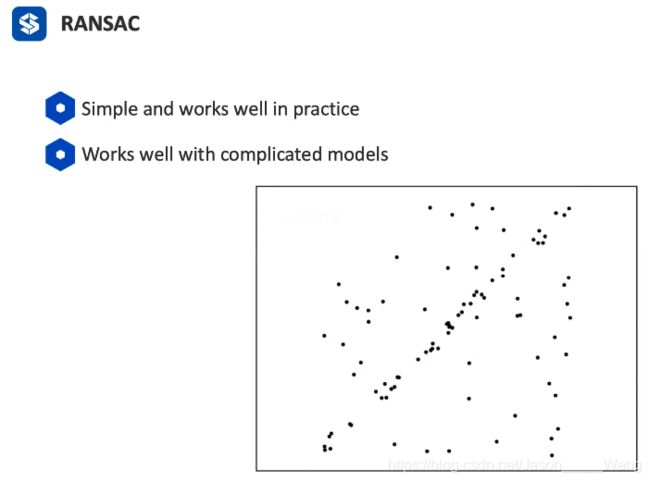
RANSAC
因为霍夫变换的模型参数一般小于三个,所以针对三维点云一般用RANSAC算法
步骤:

- 选定一个sample 即对于直线模型来说只需随机选取两个点
- 求解 直线的方程
- 计算其他点是否支持这个方案——求每个点到这个直线的距离 进行统计


4. 重复上述的步骤 当重复次数足够多时候进行比较
5.选出投票最多的模型

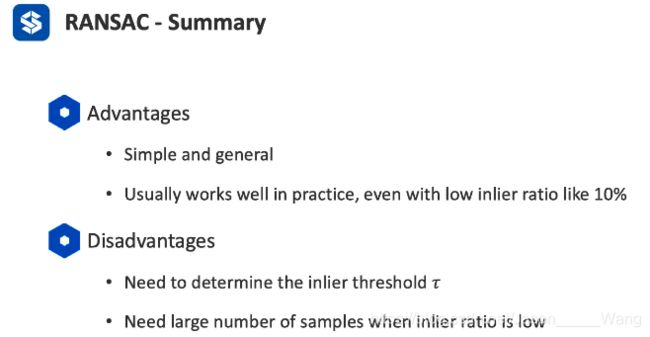
参数设置:1. τ 应该以经验或者实验设置 (一般是符合 X方分布)
2. 设置迭代的参数 n 标准:做n次迭代得到一个好的标准的置信度要大于0.99(或0.9

一些比较实用的tricks:

- 找到一条达到预期的线就可以提前终止
- 模型选出来之后 实用LSQ重新优化一下 所得数据更加准确
总结:
作业

- 选一个KITTI数据集 把地面去掉
- 对于剩下的点 聚类
- 把地面标记成蓝色 不同聚类物体用不同颜色表达 (前景聚类)
- 并将结果可视化