yolov5 模型部署NCNN(详细过程)
yolov5 模型部署NCNN
一、编译ncnn
1、在github官网输入 ncnn ,找到Tencen\ncnn 下载ncnn

2.打开vs2017 工具 x64 Native Tools Command Prompt for VS 2017
3.下载protobuf-3.4.0到本地
4.编译protobuf的动态库,输入以下命令:
cd <protobuf-root-dir>
mkdir build
cd build
cmake -G"NMake Makefiles" -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=%cd%/install -Dprotobuf_BUILD_TESTS=OFF -Dprotobuf_MSVC_STATIC_RUNTIME=OFF ../cmake
nmake
nmake install
5.编译结果如下,成功编译。
6.编译ncnn的动态库,输入命令:
cd <ncnn-root-dir>
mkdir -p build
cd build
cmake -G"NMake Makefiles" -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=%cd%/install -DProtobuf_INCLUDE_DIR=<protobuf-root-dir>/build/install/include -DProtobuf_LIBRARIES=<protobuf-root-dir>/build/install/lib/libprotobuf.lib -DProtobuf_PROTOC_EXECUTABLE=<protobuf-root-dir>/build/install/bin/protoc.exe -DNCNN_VULKAN=ON .. //需要一次性全部输入
nmake
nmake install
7.编译过程出现报错,查找原因。出现有的子模块没有下载下来,对应参照CmakeLists.txt 244行发现glslang文件夹为空。
CMake Error at CMakeLists.txt:244 (message):
The submodules were not downloaded! Please update submodules with "git
submodule update --init" and try again.
8.检查发现是命令中-DNCNN_VULKAN=ON,由于没有安装VULKAN ,所以改成-DNCNN_VULKAN=OFF。编译成功
二、模型转换
1.yolov5模型转换onnx
python models/export.py --weights ./runs/train/exp22/weights/yolov5.pt //使用yolov5自带的export 将pt模型转换成onnx
pip install onnx-simplifier //安装onnx-simplifier
python -m onnxsim ./yolov5.onnx ./yolo5-sim.onnx //简化转换得到的onnx
2.使用onnx2ncnn.exe 转换模型
cd tools/onnx
onnx2ncnn.exe <your-model-path>/model-sim.onnx <save-model-path>/model-sim.param <save-model-path>/model-sim.bin
3.出现以下错误,因为ncnn目前没有定义yolov5的切片操作。
Unsupported slice step !
Unsupported slice step !
Unsupported slice step !
Unsupported slice step !
Unsupported slice step !
Unsupported slice step !
Unsupported slice step !
Unsupported slice step !
4.打开生成的.param文件,去除不支持的网络层。
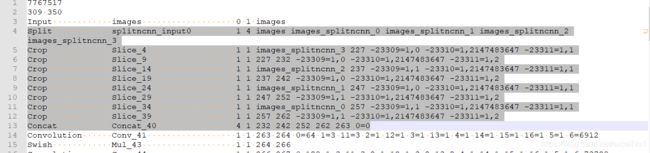
5.除去split 和crop 及concat层,一共十层,换成YoloV5Focus,总层数309变成300,如图所示。

6.将Permute的前一层Reshape 中0=xxx 改成 0 = -1。修改结果如下:

7.将修改完毕的.param 和.bin文件加载,测试完整代码如下:
#include "layer.h"
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include 8.ncnn的结果和pt的结果对比,结果一致
三.模型量化
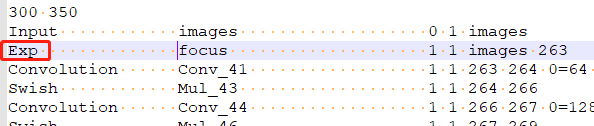
1.将param中YoloV5Focus 层改成Exp(不参与计算的层)
2.回到tools 路径,运行命令
ncnnoptimize.exe yolov5-sim.param yolov5-sim.bin yolov5-sim-opt.param yolov5-sim-opt.bin 65536
//出现下列提示
Input layer images without shape info, shape_inference skipped
Input layer images without shape info, estimate_memory_footprint skipped
3.将生成的yolov5-sin-opt.param文件打开,将之前修改的Exp名称改成YoloV5Focus

4.运行模型测试对比,结果无影响。
参考YOLOv5转NCNN过程